Изобретение относится к области авиационной техники, а именно к системам управления самолетом, использующим приводы с ограниченной скоростью перемещения рулевых поверхностей.
Системы дистанционного управления (СДУ) современных самолетов оснащаются электрогидравлическими приводами, характерной особенностью которых является ограничение скоростной характеристики на определенном уровне (Ю.Г. Оболенский, Управление полетом маневренных самолетов, Москва, филиал Воениздат, 2007 г., 480 с., с. 161). При больших сигналах управления, вызванных, как правило, действиями летчика в экстремальных ситуациях, в комплексе «самолет - СДУ» из-за ограничения скоростной характеристики привода возникают устойчивые незатухающие колебания в «большом» (когда шток привода перемещается постоянно с предельными знакопеременными скоростями), нередко не-устраняемые далее действиями пилота.
Известен способ предотвращения выхода привода на предельные скоростные возможности за счет включения в прямую цепь управления СДУ специального устройства - «префильтра», с помощью которого ограничивается скорость изменения входного сигнала в СДУ со стороны летчика (Ю.Г. Оболенский, Управление полетом маневренных самолетов, Москва, филиал Воениздат, 2007 г., 480 с., с 297, рис. 5.37, с. 377, рис. 7.28). Использование «префильтра» обеспечивает нахождение входного сигнала на привод в линейной зоне его скоростной характеристики, но только при воздействиях со стороны летчика. При этом возможен выход привода на ограничение скоростной характеристики из-за наличия в СДУ обратных связей, в частности (и особенно) - из-за обратной связи по угловой скорости, существенно увеличивающей суммарную скорость изменения сигнала на входе привода.
Известно, что эффективным способом подавления колебаний «в большом» с нелинейным приводом является снижение коэффициента усиления в прямой цепи управления (Е.П. Попов, И.П. Пальтов, Приближенные методы исследования нелинейных автоматических систем, Физматгиз, 1960 г.,789 с., с. 258÷263). Для достижения этой цели пригодно нелинейное корректирующее устройство (НКУ), позволяющие перестраивать коэффициент усиления в прямой цепи управления (Нелинейные корректирующие устройства в системах автоматического управления, коллектив авторов под редакцией Ю.И. Топчеева, Москва, Машиностроение, 1971 г., 466 с., с. 35, рис. I.10). Его недостатком является наличие сложного логического устройства для перестройки коэффициента усиления и неприемлемые границы его изменения (вплоть до изменения знака).
Для корректировки коэффициента усиления в прямой цепи управления более приемлемо НКУ, представленное в этом же источнике (Нелинейные корректирующие устройства в системах автоматического управления, коллектив авторов под редакцией Ю.И. Топчеева, Москва, Машиностроение, 1971 г., 466 с., с. 270-271, рис. VIII.2a). НКУ содержит последовательно соединенные фильтр и первый нелинейный блок для преобразования сигнала по модулю, усилительный блок с двумя входами с перестраиваемым коэффициентом усиления, выход которого является выходом устройства, а объединенные между собой вход фильтра и первый вход усилительного блока являются входом устройства. Использование этого НКУ для коррекции сигнала на входе рулевого привода сопряжено с рядом недостатков, а именно: при определенных условиях возникает разрыв в цепи передачи входного сигнала (формула VIII.1, второе условие), что недопустимо; перестройка коэффициента усиления не связана со скоростью изменения входного сигнала, т.е. с попаданием режима работы привода в зону ограничения скоростной характеристики.
Целью изобретения является подавление колебаний «в большом» в системах дистанционного управления самолетом, использующими привод рулевых поверхностей с присущим ему ограничением скоростной характеристики.
Технический результат - повышение надежности системы автоматического управления самолетом.
Ожидаемый технический результат достигается тем, что НКУ содержит последовательно соединенные фильтр и первый нелинейный блок для преобразования сигнала по модулю, первый усилительный блок с двумя входами с перестраиваемым коэффициентом усиления, выход которого является выходом устройства, а объединенные между собой вход фильтра и первый вход усилительного блока являются входом устройства. Кроме того, НКУ дополнительно включает в себя последовательно соединенные второй нелинейный блок, первый сумматор, второй усилительный блок, масштабирующий блок, интегратор, второй сумматор и блок вычисления обратной величины, датчик постоянного сигнала, при этом выход интегратора соединен с вторым инвертирующим входом первого сумматора, датчик сигнала постоянного уровня подключен к второму входу второго сумматора, а выход блока вычисления обратной величины соединен с вторым входом первого усилительного блока.
Сущность изобретения поясняется графическими изображениями:
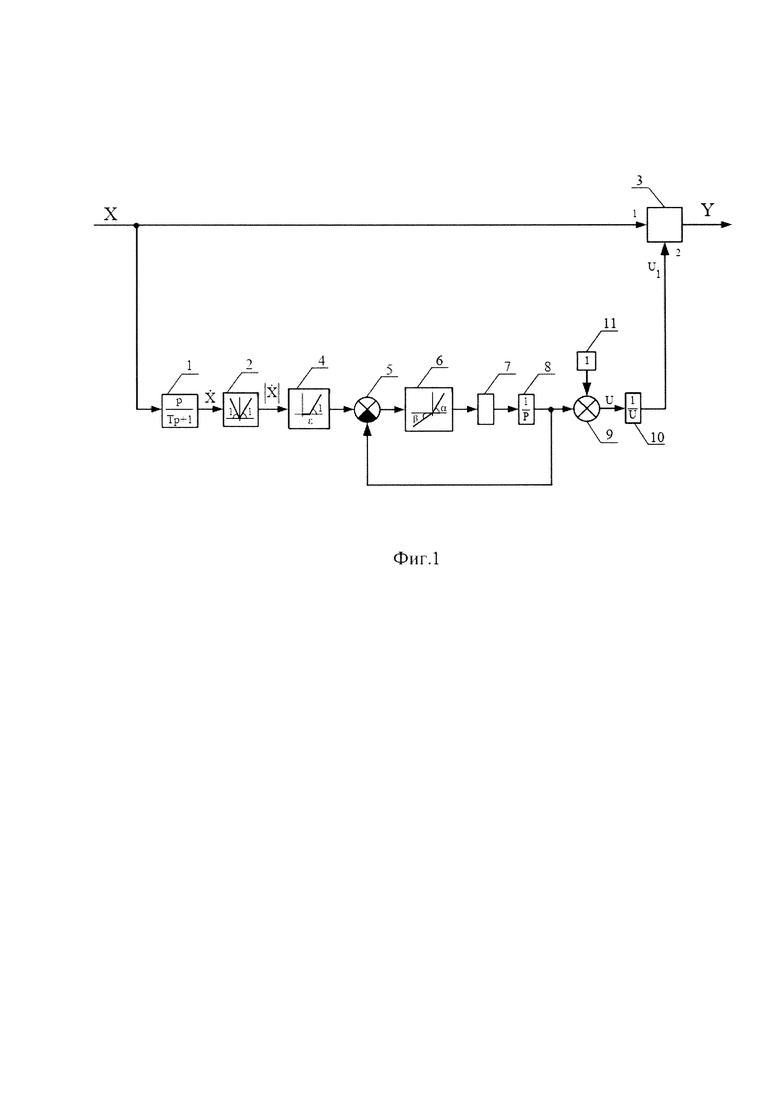
на фиг. 1 представлена структурная схема НКУ;
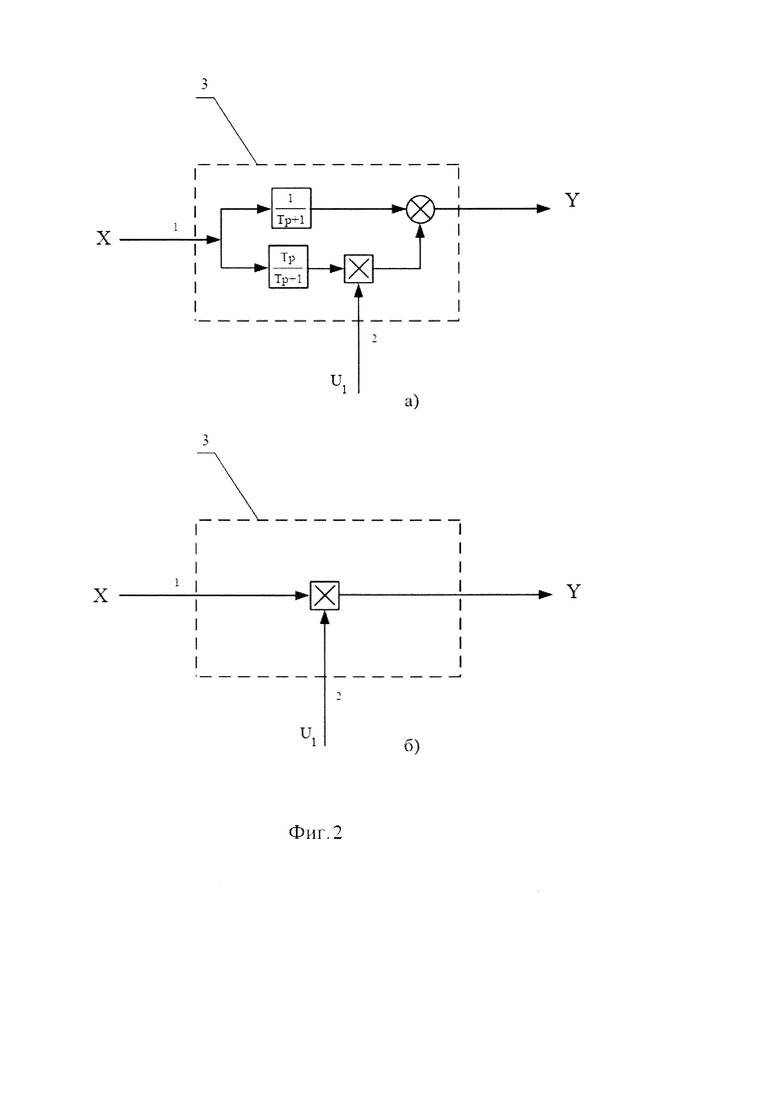
на фиг. 2 показаны варианты реализации первого усилительного блока с перестраиваемым коэффициентом усиления;
На фиг. 1, 2 использованы следующие обозначения:
1 - фильтр с передаточной функцией  где Т - постоянная времени фильтра; р - оператор дифференцирования;
где Т - постоянная времени фильтра; р - оператор дифференцирования;
2 - первый нелинейный блок, определяющий абсолютное значение входного сигнала;
3 - первый усилительный блок с перестраиваемым коэффициентом усиления;
4 - второй нелинейный блок типа зоны нечувствительности;
5 - первый сумматор;
6 - второй усилительный блок с разными коэффициентами усиления на положительный и отрицательный входные сигналы;
7 - масштабирующий блок;
8 - интегратор;
9 - второй сумматор;
10 - блок вычисления обратной величины входного сигнала;
11 - датчик постоянного сигнала, равного 1;
ε - величина зоны нечувствительности во втором нелинейном блоке;
α, β - коэффициенты усиления второго усилительного блока на положительный и отрицательный входные сигналы соответственно;
X, Y - соответственно входной и выходной сигналы НКУ;
 - сигнал оценки скорости изменения входного сигнала, поступающего на привод;
- сигнал оценки скорости изменения входного сигнала, поступающего на привод;
 - модуль сигнала оценки скорости изменения входного сигнала на привод;
- модуль сигнала оценки скорости изменения входного сигнала на привод;
U - сигнал на выходе второго сумматора 9;
U1 - сигнал на втором входе первого усилительного блока 3.
Заявляемый к патентованию НКУ содержит последовательно соединенные фильтр 1 и первый нелинейный блок 2 для преобразования сигнала по модулю, первый усилительный блок 3 с двумя входами с перестраиваемым коэффициентом усиления, выход которого является выходом устройства, а объединенные между собой вход фильтра 1 и первый вход первого усилительного блока 3 являются входом устройства. Кроме того НКУ дополнительно включает в себя последовательно соединенные второй нелинейный блок 4, первый сумматор 5, второй усилительный блок 6, масштабирующий блок 7, интегратор 8, второй сумматор 9 и блок вычисления обратной величины 10, датчик 11 постоянного сигнала, при этом выход интегратора 8 соединен с вторым инвертирующим входом первого сумматора 5, датчик сигнала постоянного уровня 11 подключен к второму входу второго сумматора 9, а выход блока вычисления обратной величины 10 соединен с вторым входом первого усилительного блока 3.
НКУ предназначено для обеспечения устойчивости "в большом" комплекса "самолет - система управления". На вход НКУ поступает сигнал X заданного отклонения органа продольного управления, сформированный в системе управления самолета. Выходным сигналом НКУ является скорректированный сигнал Y, который поступает непосредственно на вход привода рулевого органа самолета. Сигнал X дифференцируется в фильтре 1, на его выходе формируется сигнал , являющийся оценкой текущего значения скоростной характеристики привода. Первый нелинейный блок 2 выделяет модуль сигнала , благодаря чему сигнал на выходе блока 2 становится всегда положительным. Второй нелинейный блок 4 представляет собой зону нечувствительности со следующей характеристикой:
где Uвых - выходной сигнал второго нелинейного блока 4;
ε - величина зоны нечувствительности, назначаемая в соответствии с фактическим уровнем ограничения скоростной характеристики рулевого привода.
В случае, когда сигнал находится в зоне нечувствительности второго нелинейного блока 4, сигнал на его выходе Uвых=0. Поступая далее на вход следящего контура (первый вход первого сумматора 5 → второй усилительный блок 6 → масштабирующий блок 7 → интегратор 8 → инвертирующий вход первого сумматора 5) сигнал Uвых=0 формирует на выходе интегратора 8 сигнал, также равный нулю. Сигнал на выходе второго сумматора 9 становится равным 1 (за счет постоянного сигнала с выхода датчика 11, равного 1), сигнал на выходе блока вычисления обратной величины 10 также устанавливается равным 1. В этом случае сигнал U1 на втором входе первого усилительного блока 3 равен 1 и сигнал Y на выходе НКУ становится тождественно равным входному сигналу X.
В случае, когда сигнал  превышает назначенную зону нечувствительности ε во втором нелинейном блоке 4, на его выходе формируется отличный от нуля сигнал, равный
превышает назначенную зону нечувствительности ε во втором нелинейном блоке 4, на его выходе формируется отличный от нуля сигнал, равный  под действием которого возрастает положительный сигнал на выходе интегратора 8. При этом сигнал на выходе второго сумматора 9 возрастает (становится больше 1), сигнал на выходе блока вычисления обратной величины 10, наоборот уменьшается (становится меньше 1), вследствии чего понижается коэффициент передачи первого усилительного блока 3. Процесс перестройки (снижения) коэффициента передачи первого усилительного блока 3 продолжится до тех пор, пока сигнал
под действием которого возрастает положительный сигнал на выходе интегратора 8. При этом сигнал на выходе второго сумматора 9 возрастает (становится больше 1), сигнал на выходе блока вычисления обратной величины 10, наоборот уменьшается (становится меньше 1), вследствии чего понижается коэффициент передачи первого усилительного блока 3. Процесс перестройки (снижения) коэффициента передачи первого усилительного блока 3 продолжится до тех пор, пока сигнал  не войдет в зону нечувствительности ε второго нелинейного блока 4. При этом сигнал на выходе интегратора 8 «списывается» от накопленного ранее значения (за счет отрицательной обратной связи между интегратором 8 и инвертирующим входом сумматора 5), сигналы на выходе второго сумматора 9 и на выходе блока вычисления обратной величины 10 восстанавливаются до значения, равного 1. Коэффициент передачи первого усилительного блока 3 также восстанавливается до значения, равного 1.
не войдет в зону нечувствительности ε второго нелинейного блока 4. При этом сигнал на выходе интегратора 8 «списывается» от накопленного ранее значения (за счет отрицательной обратной связи между интегратором 8 и инвертирующим входом сумматора 5), сигналы на выходе второго сумматора 9 и на выходе блока вычисления обратной величины 10 восстанавливаются до значения, равного 1. Коэффициент передачи первого усилительного блока 3 также восстанавливается до значения, равного 1.
Особенность второго усилительного блока 6 состоит в том, что положительный сигнал при прохождении через этот элемент усиливается сильнее, чем отрицательный (α>β), что обеспечивает быстрое нарастание выходного сигнала интегратора 8, и более медленное, по сравнению с нарастанием, списывание выходного сигнала интегратора 8. С помощью масштабирующего блока 7 формируется приемлемый общий коэффициент усиления в следящем контуре: первый вход первого сумматора 5 → второй усилительный блок 6 → масштабирующий блок 7 → интегратор 8 инвертирующий вход первого сумматора 5.
Таким образом, при малых скоростях изменения входного сигнала X, когда  НКУ не вносит изменений во входной сигнал, т.е. Y≡X. При больших скоростях изменения входного сигнала, при таких, что
НКУ не вносит изменений во входной сигнал, т.е. Y≡X. При больших скоростях изменения входного сигнала, при таких, что  коэффициент передачи входного сигнала X на выход НКУ уменьшается. При этом скорость изменения сигнала, поступающего от НКУ на вход рулевого привода, снижается до уровня, соответствующего ситуации нахождения скоростной характеристики привода в линейной зоне, что приводит к повышению устойчивости "в большом" комплекса «самолета - система управления».
коэффициент передачи входного сигнала X на выход НКУ уменьшается. При этом скорость изменения сигнала, поступающего от НКУ на вход рулевого привода, снижается до уровня, соответствующего ситуации нахождения скоростной характеристики привода в линейной зоне, что приводит к повышению устойчивости "в большом" комплекса «самолета - система управления».
На фиг. 2 приведены варианты реализации первого усилительного блока 3. В варианте, представленном на фиг. 2 а), усилительный блок включает в себя апериодический фильтр с передаточной функцией  дифференцирующий фильтр с передаточной функцией
дифференцирующий фильтр с передаточной функцией  где р - оператор дифференцирования, Т - одинаковая постоянная времени в обоих фильтрах, блок перемножения и сумматор, выход которого является выходом первого усилительного блока 3. Входной сигнал X через апериодический фильтр подключен к первому входу сумматора и через последовательно соединенные дифференцирующий фильтр и блок перемножения - к второму входу сумматора. Выходной сигнал Y имеет вид
где р - оператор дифференцирования, Т - одинаковая постоянная времени в обоих фильтрах, блок перемножения и сумматор, выход которого является выходом первого усилительного блока 3. Входной сигнал X через апериодический фильтр подключен к первому входу сумматора и через последовательно соединенные дифференцирующий фильтр и блок перемножения - к второму входу сумматора. Выходной сигнал Y имеет вид
где U1 - сигнал на втором входе первого усилительного блока 3. При U1=1 справедливо соотношение  т.е. входной сигнал X передается на выход первого усилительного блока 3 без искажений по амплитуде и фазе. При уменьшении сигнала U1, т.е. когда U1<1, сигнал Y представляется в виде
т.е. входной сигнал X передается на выход первого усилительного блока 3 без искажений по амплитуде и фазе. При уменьшении сигнала U1, т.е. когда U1<1, сигнал Y представляется в виде
и в зависимости от величины сигнала U1 уменьшается по амплитуде с некоторым запаздыванием по фазе. Во втором варианте реализации первого усилительного блока 3 в виде блока перемножения (фиг. 2б) сигнал Y имеет вид Y=X⋅U1, т.е. выходной сигнал НКУ строго соответствует входному сигналу X при U1=1 и уменьшается по амплитуде при U1<1, не претерпевая при этом фазовых искажений.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ ПОЛЕТОМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2836312C1 |
| ОГРАНИЧИТЕЛЬ ПРЕДЕЛЬНЫХ РЕЖИМОВ ПОЛЕТА МАНЕВРЕННОГО САМОЛЕТА ПО ПЕРЕГРУЗКЕ | 2019 |
|
RU2711040C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В БОКОВОМ ДВИЖЕНИИ | 2017 |
|
RU2671063C1 |
| ОГРАНИЧИТЕЛЬ ПРЕДЕЛЬНЫХ РЕЖИМОВ ПОЛЕТА МАНЕВРЕННОГО САМОЛЕТА | 2019 |
|
RU2719711C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КРЕНА | 2020 |
|
RU2753776C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В ПРОДОЛЬНОМ КАНАЛЕ ПРИ ДОЗАПРАВКЕ В ВОЗДУХЕ | 2022 |
|
RU2833735C2 |
| СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА С АДАПТИВНОЙ ПЕРЕКРЕСТНОЙ СВЯЗЬЮ | 2019 |
|
RU2736400C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ДВУХКИЛЕВОГО ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КУРСА | 2020 |
|
RU2765837C1 |
| СИСТЕМА ПРОДОЛЬНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2021 |
|
RU2769452C1 |
| Нелинейный префильтр, обеспечивающий подавление явления раскачки самолета летчиком | 2023 |
|
RU2814931C1 |
Нелинейное корректирующее устройство для систем автоматического управления содержит фильтр, два нелинейных блока, два усилительных блока, фильтр, два сумматора, масштабирующий блок, интегратор, блок вычисления обратной величины, датчик сигнала постоянного уровня, соединенные определенным образом. Обеспечивается повышение надежности системы автоматического управления самолетом. 3 з.п. ф-лы, 2 ил.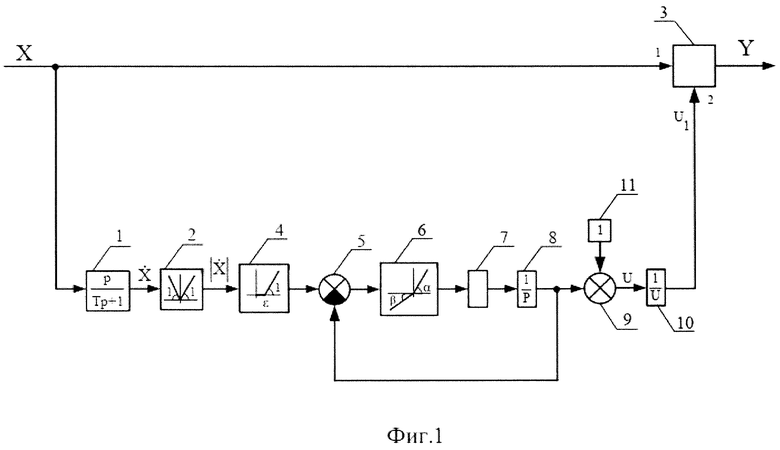
1. Нелинейное корректирующее устройство для систем автоматического управления, содержащее последовательно соединенные фильтр и первый нелинейный блок для преобразования сигнала по модулю, первый усилительный блок с двумя входами с перестраиваемым коэффициентом усиления, выход которого является выходом устройства, а объединенные между собой вход фильтра и первый вход усилительного блока являются входом устройства, отличающееся тем, что дополнительно включает в себя последовательно соединенные второй нелинейный блок, первый сумматор, второй усилительный блок, масштабирующий блок, интегратор, второй сумматор и блок вычисления обратной величины, датчик сигнала постоянного уровня, при этом выход интегратора соединен со вторым инвертирующим входом первого сумматора, датчик сигнала постоянного уровня подключен ко второму входу второго сумматора, а выход блока вычисления обратной величины соединен со вторым входом усилительного блока.
2. Нелинейное корректирующее устройство для систем автоматического управления по п. 1, отличающееся тем, что второй нелинейный блок представляет собой зону нечувствительности, величина которой определяется уровнем ограничения скоростной характеристики привода, используемого в системе автоматического управления.
3. Нелинейное корректирующее устройство для систем автоматического управления по п. 1, отличающееся тем, что коэффициент усиления второго усилительного блока изменяется по величине в зависимости от знака входного сигнала.
4. Нелинейное корректирующее устройство для систем автоматического управления по п. 1, отличающееся тем, что выходной сигнал интегратора ограничен по уровню в области положительных значений начиная от нуля.
| RU 94028409 A1, 20.05.1996 | |||
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2369524C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2383466C1 |
| US 20190196509 A1, 27.06.2019 | |||
| US 20190127049 A1, 02.05.2019. | |||

