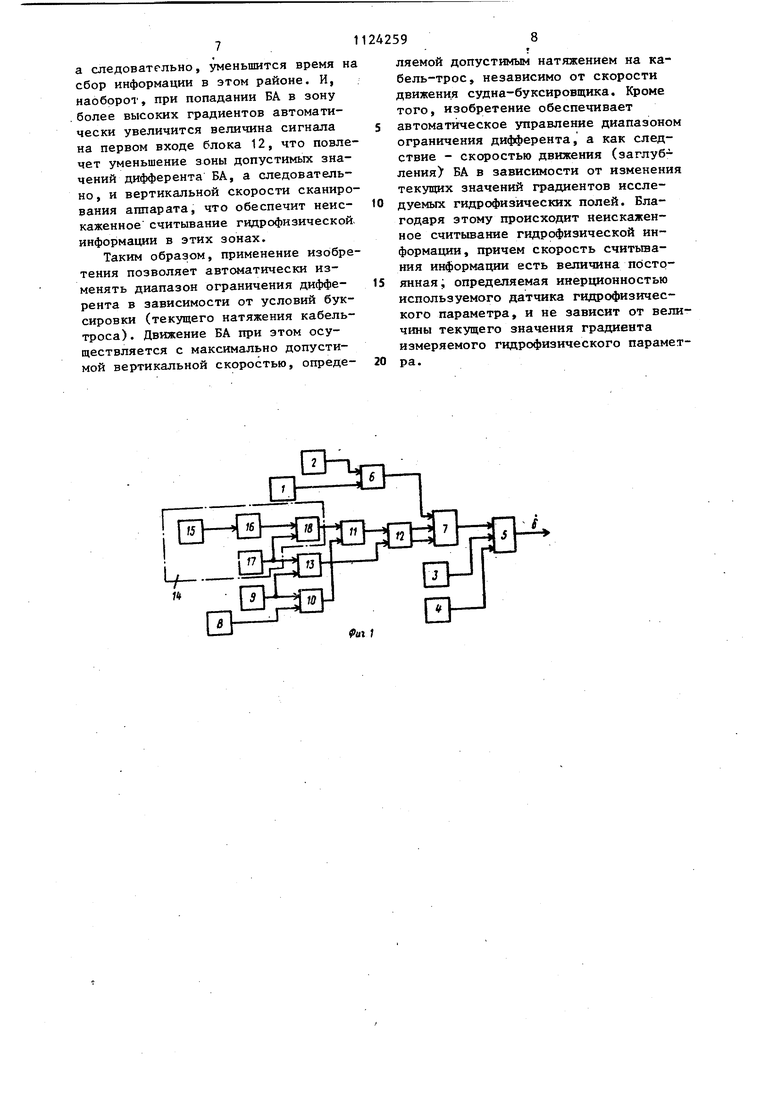
Изобретение относится к системам управле.ния подводными буксируемыми аппаратами (БА), используемыми для океанологических исследований. По основному авт. св. № 875347 устройство для управления подводным буксируемым аппаратом, обеспечивающе высокзпо надежность при буксировке БА за счет уменьшения нагдузки на буксирный трос при маневрировании аппарата в вертикально: плоскости. , , Устройство для управления подводным буксируемым аппаратом содержит эадатчйк и датчик глубины и датчики дифферента и скорости изменения дифферента, подключенные соответственно к первому и второму входам блока управления горизонтальными рулями, последовательно соединенные сумматор и блок ограничения дифферента, выходом подключенньй к треть му входу блока управления горизонтальными рулями, причем первый и вт рой входы сумматора соединены соответственно с задатчиком и датчиком глубины 1 j. Недостатком известного устройства является невозможность автоматического изменения диапазона ограничения дифферента в зависимости от натяжения кабель-троса и изменения значений градиентов исследуемых: гид рофизических полей, что приводит к недостаточной точности и быстродействию устройс-пва. Цель изобретения - повышение точ ности и быстродействия при проведении измерений гидрофизических параметров океана., Цель достигается тем, что устрой ство для управления подъемным букси руемым аппаратом, содержащее задатЧик и датчик глубины и датчики дифферента и скорости изменения дифферента, подключенные соответственно к первому и второму входам блока уп равления горизонтальными рулями, последовательно соединенные сумматор и блок ограничения дифферента, вырФодом подключенный к третьему вхо ду блока управления горизонтальными рулями, причем первый и второй входы сумматора соединены со.ответствен но с задатчиком и датчиком глубины, снабжено датчиком и задатчиком на, тяжения кабель-троса, вторым сумматором, блоками выбора нижнего и верх 592 него уровней ограничения дифферента и блоком формирования диапазона ограничения дифферента, причем выходы датчика и задатчика натяжения кабель-троса подключены к входам второго сумматор.а, выход которого подключен к первому -входу блока выбора верхнего уровня ограничения дифферента, второй вход которого подключен к шине подачи сигнала об изменении градиента измеряемого гидрофизического параметра, а выход - к первому входу блока формирования диапазона ограничения дифферента , первьй и второй выходы которого подключены соответственно ко второму и третьему входам блока ограничения дифферента, второй вход к выходу блока выбора нижнего уровня ограничения дифферента, первый вход которого подключен к шине сиг,нала заданной величины градиента измеряемого параметра, а второй вход - к выходу задатчика натяжения кабель-троса. Каждый из блоков выбора соответственно нижнего-и верхнего уровней . ограничения дифферента вьшолнен на компараторе и подключенных через разделительные диоды к его выходу своими управляющими входами разнополярных ключах, выходы которых объединены и являются выходом блока , входами которого являются объединенные входы компаратора и ключей. Блок формирования диапазона ограничения дифферента состоит из последовательно соединенных первого инвертора, сумматора и второго инвертора, причем первым входом блока является один из входов сумматора , вторым - вход первого инвертора, а первым и вторым выходами бло.ка являются соответственно выход сумматора и выход второго инвертора. I - На фиг. 1 изображена блок-схема устройства} на фиг. 2 - принципиальные схемы отдельных блоков устройства. Устройство для управления подводным буксируемым аппаратом (фиг. 1) содержит датчик 1 и задатчик 2 глубины, датчики 3 дифферента и 4 скорости изменения дифферентау подключенные соответственно к первому и второму входам блока 5 управления горизонтальными рулями, последовательно соединенные первый сумматор 6 и блок 7 ограничения дифферента, выходом подключенный к третьему входу блока 5 управления горизонталь ными рулями, причем первый и второй входы первого сумматора 6 соединены соответственно с патчиком 1 и задатчиком 2 глубины. Устройство вкл чает также датчик 8 и задатчик 9 натяжения кабель-троса, подключенные соответственно к первому и второму входам второго сумматора 10, выход которого подключен к первому входу блока 11 выбора верхнего уровня ограничения дифферента, второй вход которого предназначен для подключения к шине сигналов об изменении гра диента измеряемого гидрофизического параметра, выход блока 11 подключен к первому входу блока 12 формирования диапазона ограничения дифферента первый и второй выходы которого подключены соответственно к второму и третьему входам блока 7, второй вход блока 12 подключен к выходу блока 13 выбора нижнего уровня ограничения , первый вход которого предназначен для подключения к шине сигналов заданной величины градиента из меряемого параметра, а второй - к выходу задатчика 9 натяжения кабельтроса. Сигналы, пропорциональные значениям заданного и текущего градиентов измеряемого гидрофизического пара метра,формируются в измерительном блоке 14, установленном на борту буксируемого аппарата, которьй непосредственно в состав устройства дли управления не входит. Измеритель ный блок 14 состоит из датчика 15 измеряемого гидро4 1зичвского параметра, блока 16 определения градиента измеряемого гидрофизического параметра, задатчика 17 градиента измеряемого гидрофизического параметра и сумматора 18. I: Блок 11 выбора верхнего и блок 13 выбора нижнего уровня ограничения дифферента (фиг. 2) выполнены на опе рационном усилителе 19 с резисторами 20, 21, выход которого через разделительные 22, 23 диоды подключен к управляющим входам разнополярных ключей 24, 25, выходы которых объеди иены и являются выходом блока, а вхо дами - объединенные входы компаратора и ключей. Блок 12 формирования диапазона ограничения дифферента (фиг. 2) содержит последовательно соединенные первьй 26 инвертор, выполненный на операционном усилителе 27 с резисторами 28-30, сумматор 31, выполненньй на операционном усшштеле 32 с резисторами 33-36, и второй инвертор 37, выполненный аналогично первому инвертору 26. Устройство работает следующим образом. Перемещение БА в вертикальной плоскости 3 кораблем.-5уксировщиком обеспечивается изменением величины гидродинамической силы создаваемой горизонтальными рулями аппарата, перекпадка которых происходит в соответствии с сигналом рассогласования между заданным и текущим значениями глубин, поступающих с выходов задатчика 2 и датчика 1 глубины, в сторону соответствующую уменьшению этого рассогласования по алгоритмуN(VY) , (i; скорость перекладки горизонтального руля, значение заданной и текущей глубины, щзфферента и угловой скорости БА соответстгвенно}постоянные коэффициг К, 2, енты. По разности ДУ У - У. в первом сумматоре 6 вырабатьтается сигнал, соответствующий требуемому углу дифферента БА V , поступающий в качестве заданного значения с вЕЖОда блока 7 ограничения дифферента на первый вход блока 5 управления горизонтальныю рулями, где ои сравнивается с сигналами, поступающими с датчиков 3 и 4. В соответствии с величиной рассогласования Vg и V в блоке 5 управления вырабатьшаются сигналы на поворот руля. БА отрабатывает заданное значение угла дифферента V Vj , и тем самым создается заглубляющая гияродинамическая сила, обеспечивающая тюремещение БА по глубине и его стабилизацию на заданной глубине. При больщих рассогласованиях ДУ блок 7 ограничения дифферента производит ограничение заданного значения дифферента БА V ; V.,. Тем
Kicfx
самым ограничивается угол атаки и угол наклона траектории, т.е. гидродинамическая сила, развиваемая БА, и скорость его заглубления. Следовательно, уменьшается величина натяжения буксирного троса, которая пропорциональна квадрату скорости БА и углу атаки БА, определяющего величину коэффициента гидродинамической силы.
Формирование величины оск происходит следующим образом.
С выходом, задатчиков 17 и 9 сигналы, пропорциональные допустимым значениям градиента измеряемого гидрофизического параметра (задатчик 17 градиента измеряемого гидрофизического параметра входит в состав измерительного блока 14) и натяжения используемого кабель-троса, поступают соответстенно на первый и второй входы блока 13 выбора нижнего уровня ограничения дифферента, На выходе блока 13 устанавливается наименьший из поступивших на его вхды сигналов. Наличие данного блока связано с необходимостью автоматически выбирать наименьший уровень ограничения дифферента либо по допустимому натяжению используемого кабель троса, либо по допустимому уровню инерционности используемого датчика, так как указанные величины в общем случае могут меняться в ширких пределах (испрльзование различных типов кабель-тросов, имеющих различную величину допустимых нагрузок, старение кабель-троса в процессе эксплуатации и, как следствие снижение этих допусков, ис-пользование различных датчиков, имеющих различные постоянные времени и др.).
С выхода блока 13 наименьший из входных сигналов по.ступает на второй вход блока 12 формирования диапазона ограничения дифферента, где формируются верхняя V и нижняя VjJioK граница ограничения дифферента БА, поступающие соответственно на второй и третий входы блока 7 ограничения дифферента.
Установившаяся величина ограничения дифферента БА в процессе проведения исследований может изменяться при изменении либо условий бзгксировки (изменении скорости движения судна-буксйровпщка), либо текущих градиентов измеряемого гидрофизического параметра. Формирование сигналов , пропорциональных этим изменениям, осуществляется следующим образом. Па первый вход блока 11 выбора верхнего уровня ограничения с выхода второго сумматора 10 поступает сигнал, пропорциональный разности сигналов заданного- и текущего значений натяжения кабель-троса,
поступающих соответственно с задатчика 9 и датчика 8 натяжения кабельтроса на первый и второй входы второго сумматора 10.
На второй вход блока 11 поступает сигнал, пропорциональный разности заданного и текущегозначений градиента измеряемого гидрофизического параметра, сформированного измерительным блоком 14, который
не входит в состав устройства для управления подводным буксируемым аппаратом.
На выходе блока 11 устанавливается наибольший из входных сигналов,
который поступает на первый вход блока 12 формирования диапазона ограничения дифферента.
Следовательно, величина выставленного уровня ограничения дифферента (второй вход блока 12 формирования диапазона ограничения дифферента) в процессе буксировки будет постоянно корректироваться. Коррекция осуществляется изменением в процессе проведения исследований сигнала, поступающего на первый вход блока 12. Например, при увеличении скорости буксировки возрастет натяжение на кабель-трос, что приведет к росту сигнала на пербом входе блока 12, и, следовательно, к уменьшению зоны допустимых значений дифферента (первый и второй выходы блока 12), и наоборот, при уменьшении скорости буксировки зоны увеличатся, а следовательно , появится возможность маневрирования БА с бс льшей вертикальной скоростью без опасности обрыва кабель-троса. Аналогично, при
движении БА из зоны максимальных градиентов в зону малых градиентов измеряемого гидрофизического элемента величины сигнала на первом входе блока 12 уменьшится, что повлечет
S за собой увеличение зоны допустимых значений дифферента БА, что позволит проводить сканирование аппарата с более высокой вертикальной скоростью.
а следовательно, уменьшится время на сбор информации в этом районе. И, наоборот, при попадании БА в зону более высоких градиентов автоматически увеличится величина сигнала на первом входе блока 12, что повлечет уменьшение зоны допустимых значений дифферента БА, а следовательно , и вертикальной скорости сканирования аппарата, что обеспечит неискаженное считывание гидрофизическойинформации в этих зонах.
Таким образом, применение изобретения позволяет автоматически изменять диапазон ограничения дифферента в зависимости от условий буксировки (текущего натяжения кабельтроса). Движение БА при этом осуществляется с максимально допустимой вертикальной скоростью, определяемой допустимым натяжением на кабель-трос, независимо от скорости движения судна-буксировщика. Кроме того, изобретение обеспечивает автоматическое управление диапазоном ограничения дифферента, а как следствие - скоростью движения (заглубления) БА в зависимости от изменения текущих значений градиентов исследуемых гидрофизических полей. Благодаря зтому происходит неискаженное считывание гидрофизической информации, причем скорость считьгаания информации есть величина постоянная ; определяемая инерционностью используемого датчика гидрофизического параметра, и не зависит от величины текущего значения градиента измеряемого гидрофизического параметра.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления подводным буксируемым аппаратом | 1979 |
|
SU875347A1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ СУДОВОЙ ЛЕБЕДКИ | 1994 |
|
RU2074501C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
| Измеритель флуктуаций скорости течения | 1984 |
|
SU1216734A1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| Система управления буксировкой судов | 1989 |
|
SU1678695A1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| БУКСИРУЕМОЕ УСТРОЙСТВО ДЛЯ КАРТОГРАФИРОВАНИЯ ОБЪЕКТОВ МОРСКОГО ДНА И ИХ ВИЗУАЛЬНОЙ ЗАВЕРКИ | 2018 |
|
RU2679922C1 |

1. УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДЮДНЫМ БУКСИРУЕМЬМ АППАРАТОМ по авт. св. № 875347, отличающееся тем, что, с целью повышения точности и быстродействия при проведении измерений гидрофизических параметров океана, оно снабжено датчиком и задатчиком натяжения кабель-троса, вторым сумматором, блоками выбора нижнего и верхнего уровней ограничения дифферента и блоком форм фования диапазона ограничения дифферента, причем выходы датчика и эадатчика натяжения кабель-троса подключены к входам второго сумматора, выход которого подключен к первому входу блока выбора верхнего уровня ограничения дифферента, второй вход которого подключен к шине подачи сигнала об изменении градиента измеряемого гидрофизического параме тра, a выход - к первому входу блока формирования диапазона ограничения дифферента, первый и второй выходы которого подключены соответственно к второму и третьему входам блока ограничения дифферента, второй вход к выходу блока выбора нижнего уровня ограничения дифферента, первый вход которого подключен к шине сигнала заданной величины градиента измеряемого параметра, a второй вход - к выходу задатчика натяжения кабель-троса. 2.Устройство по п. 1, отличающееся тем, что каждьй из блоков выбора соответственно нижнего и верхнего уровней ограничения W дифферента вьтолнен на компараторе и подключенных через разделительные диоды к его выходу своими управляющими входами разнополярных ключах, выходы которых объединены и являются выходом блока, -входами которого ЯВЛ5ПОТСЯ объединенные входы компаратора и ключей. й| 3.Устройство по п. 1, отлиГФ чающееся тем, что блок форСП мирования диапазона ограничения дифферента состоит из последовательно соединенных первого инвертора, сумматора и второго инвертора, причем первым входом блока является один из входов сумматора, вторым - вход первого инвертора, a первым и вторым выходами блока являются соответственно выход сумматора и выход второго инвертора.
рЭпШ
Ц-нипП--,-I
LirfeR
-Нг-
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для управления подводным буксируемым аппаратом | 1979 |
|
SU875347A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
