1
Изобретение относится к Системам управления в пространстве подводными буксируемыми аппаратами, используемыми для океанологических исследований.
Известно устройство управления подводным буксируемым аппаратом (БА), в котором управление движением аппарата в вертикальной плоскости производится с помощью горизонтального руля, который регулируется с помощью дистанционного сервопривода для изменения угла атаки корпуса и, следовательно, гидродинамической силы, создаваемой аппаратом, и его глубины Г13.
В буксируемых аппаратах самолетной компоновки могут быть использованы устройства управления, построенные на базе авиационных автопилотов, которые обеспечивают стабилизацию высоты полета и ориентации летательных аппаратов.
Наиболее близким по технической сущности к предлагаемому является устройство, содержащее датчики положения летательного аппарата и каналы управления горизонтальными и вертиУальными рулями и элеронами, которые можно рассматривать эквивалентными
датчикам положения и каналам управления БА. Для управления БА при маневрировании в вертикальной плоскости всостав устройства будут входить блок задания глубины движения БА, датчики глубины, дифферента и угловой скорости дифферента, котоЕ«е под-, ключены к каналу управления горизонтальным рулем 2. При этом реали10зуется линейный алгоритм управления ВА
«i -K tX -Nj-KaV-S T..
0 - скорость перекладки
где
горизонтального руля;
15 , - значение заданной и
текущей глубины, дифферента и угловой скорости ЮЛ соответст20венно,
)i Kiji,Kn - постоянные коэффициенты.
Такое устройство управления обеспечивает стабилизацию заданной глу25бины движения БА и перемещение БА в вертикальной плоскости при изменении заданного значения Yj, производимого оператором.
Недостатком этого устройства явля, ется то обстоятельство, что в процес30
се маневрирования БД в вертикальной плоскости резко возрастает натяжение буксирного троса, что может привести к отрыву последнего и утере БД.
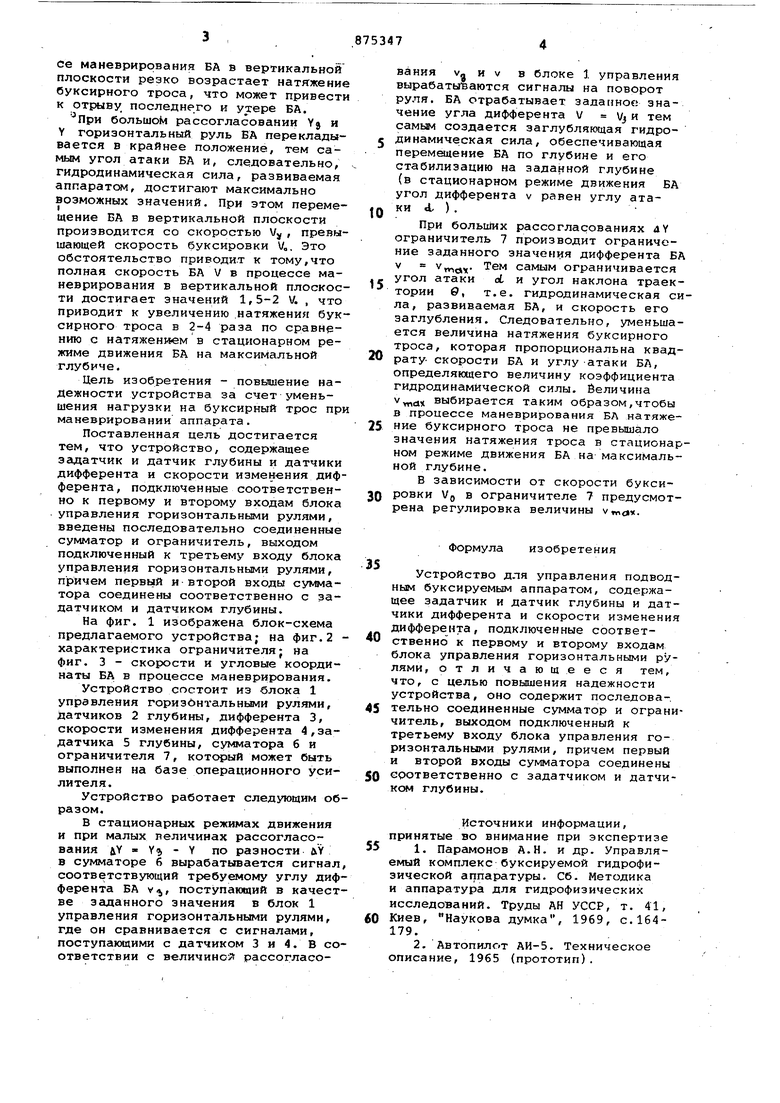
большом рассогласовании Yj и Y горизонтальный руль БА перекладывается в крайнее положение, тем самым угол атаки БД и, следовательно, гидродинамическая сила, развиваемая аппаратс 1, достигают максимально возможных значений. При этом перемещение БД в вертикальной плоскости производится со скоростью /у , превышающей скорость буксировки Vo. Это обстоятельство приводит к тому,что полная скорость БД V в процессе маневрирования в вертикальной плоскости достигает значений 1,5-2 V. , что приводит к увеличению .натяжения буксирного троса в 2-4 раза по сравн0нию с натяжением в стационарном режиме движения БД на максимальной глубине.
Цель изобретения - повьтшение надежности устройства за счет уменьшения нагрузки на буксирный трос пр маневрировании аппарата.
Поставленная цель достигается тем, что устройство, содержащее задатчик и датчик глубины и датчики дифферента и скорости изменения дифферента, подключенные соответственно к первому и второму входам блока управления горизонтальными рулями, введены последовательно соединенные сумматор и ограничитель, выходом подключенный к третьем входу блока управления горизонтальными рулями, причем первый и второй входы сумматора соединены соответственно с задатчиком и датчиком глубины.
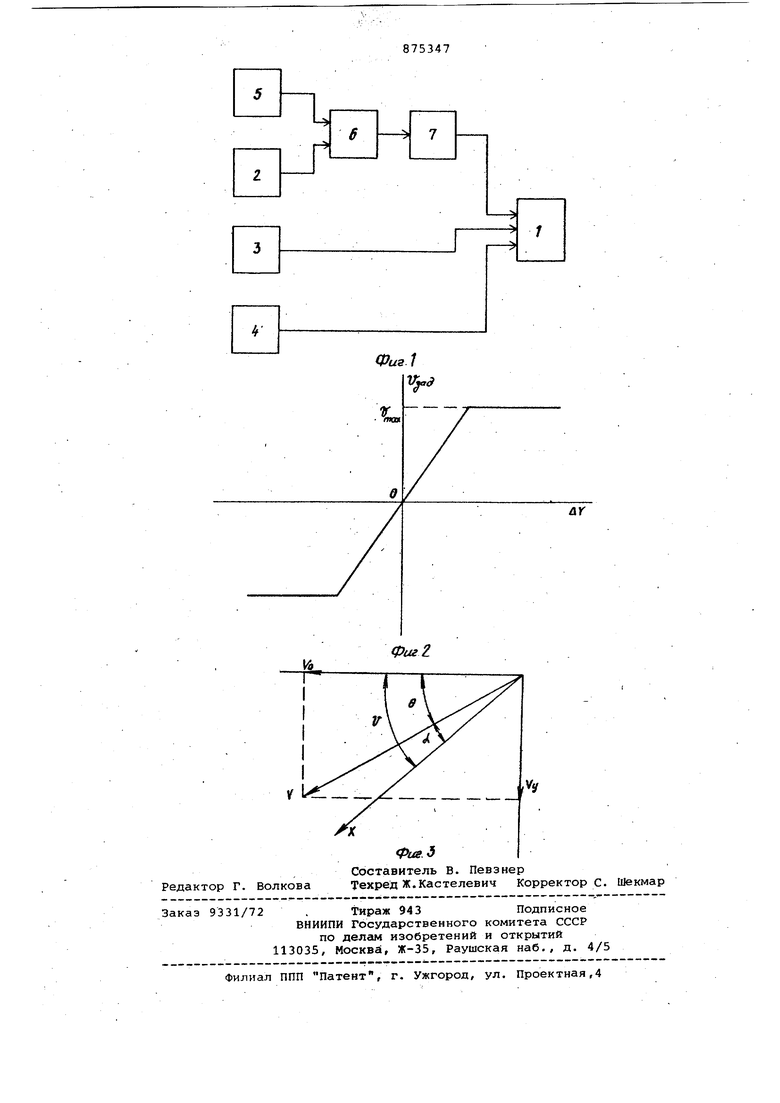
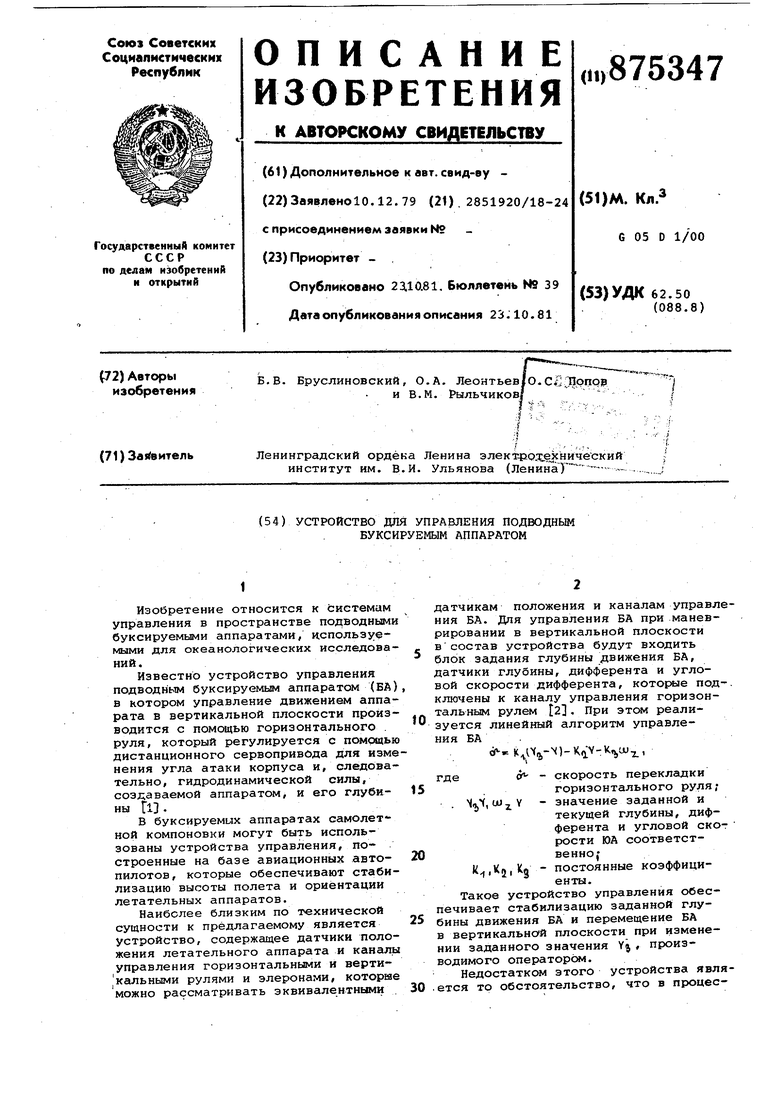
На фиг. 1 изображена блок-схема предлагаемого устройства; на фиг.2 характеристика ограничителя; на фиг. 3 - скорости и угловые координаты БА в процессе маневрирования.
Устройство состоит из блока 1 управления горизонтальными рулями, Датчиков 2 глубины, дифферента 3, скорости изменения дифферента 4,задатчика 5 глубины, сумматора 6 и ограничителя 7, который может быть выполнен на базе операционного усилителя.
Устройство работает следующим образом.
В стационарных режимах движения и при малых величинах рассогласования 4Y - Y, - Y по разности лУ в сумматоре 6 вырабатывается сигнал соответствующий требуемому углу дифферента БД v, поступающий в качестве заданного значения в блок 1 управления горизонтальными рулями, где он сравнивается с сигналами, поступающими с датчиком 3 и 4. В соответствии с величиной рассогласования Vj и V в блоке 1 управления вырабатываются сигналы на поворот руля, БД отрабатывает заданное значение угла дифферента 1 Vj и тем самьм создается заглубляющая гидроJ динамическая сила, обеспечивающая перемещение БД по глубине и его стабилизацию на заданной глубине (в стационарном режиме движения БД угол дифферента v равен углу атаки «t ) .
При больших рассогласованиях dY ограничитель 7 производит ограничение заданного значения дифферента БД V . Тем самым ограничивается
- угол атаки oL и угол наклона траектории 0, т.е. гидродинамическая сила, развиваемая БД, и скорость его заглубления. Следовательно, уменьшается величина натяжения буксирного троса, которая пропорциональна квадрату. скорости БА и углу атаки БД, определяющего величину козффициента гидродинамической силы, величина упвч выбирается таким образом,чтобы в процессе маневрирования БЛ натяжение буксирного троса не превышало
значения натяжения троса в стационарном режиме движения БД на максимальной глубине,
Б зависимости от скорости буксировки VQ в ограничителе 7 предусмотрена регулировка величины VWCK.
Формула изобретения
Устройство для управления подводным буксируемым аппаратом, содержащее задатчик и датчик глубины и датчики дифферента и скорости изменения дифферента, подключенные соответственно к первому и второму входам блока управления горизонтальными рулями, отличающееся тем, что, с целью повышения надежности устройства, оно содержит последова-.
5 тельно соединенные сумматор и ограничитель, выходом подключенный к третьему входу блока управления горизонтальными рулями, причем первый и второй входы сумматора соединены
0 соответственно с задатчиком и датчиком глубины.
Источники информации, принятые во внимание при экспертизе
5 1. Парамонов Д.Н. и др. Управляемый комплекс буксируемой гидрофизической аппаратуры. Сб. Методика и аппаратура для гидрофизических исследований. Труды АН УССР, т. 41,
0 Киев, Наукова думка, 1969, с,164179.
2. Двтопилот ДИ-5. Техническое описание, 1965 (прототип).
Физ1
.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления подводным буксируемым аппаратом | 1983 |
|
SU1124259A2 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| СПОСОБ УПРАВЛЕНИЯ ДИФФЕРЕНТОМ БУКСИРУЕМОГО ПОДВОДНОГО ОБЪЕКТА | 2017 |
|
RU2657701C1 |
| ИЗМЕРИТЕЛЬНАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ВОДНОЙ СРЕДЫ НА ХОДУ СУДНА (ВАРИАНТЫ) | 2017 |
|
RU2669251C1 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
| АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНО-НАДВОДНЫЙ АППАРАТ ПЛАНЕРНОГО ТИПА | 2024 |
|
RU2831312C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| МОРСКОЙ СПАСАТЕЛЬ - НАУЧНО-ИССЛЕДОВАТЕЛЬСКОЕ СУДНО | 2015 |
|
RU2603818C1 |
| ПОДВОДНЫЙ БУКСИРУЕМЫЙ АППАРАТ | 1990 |
|
RU2096245C1 |