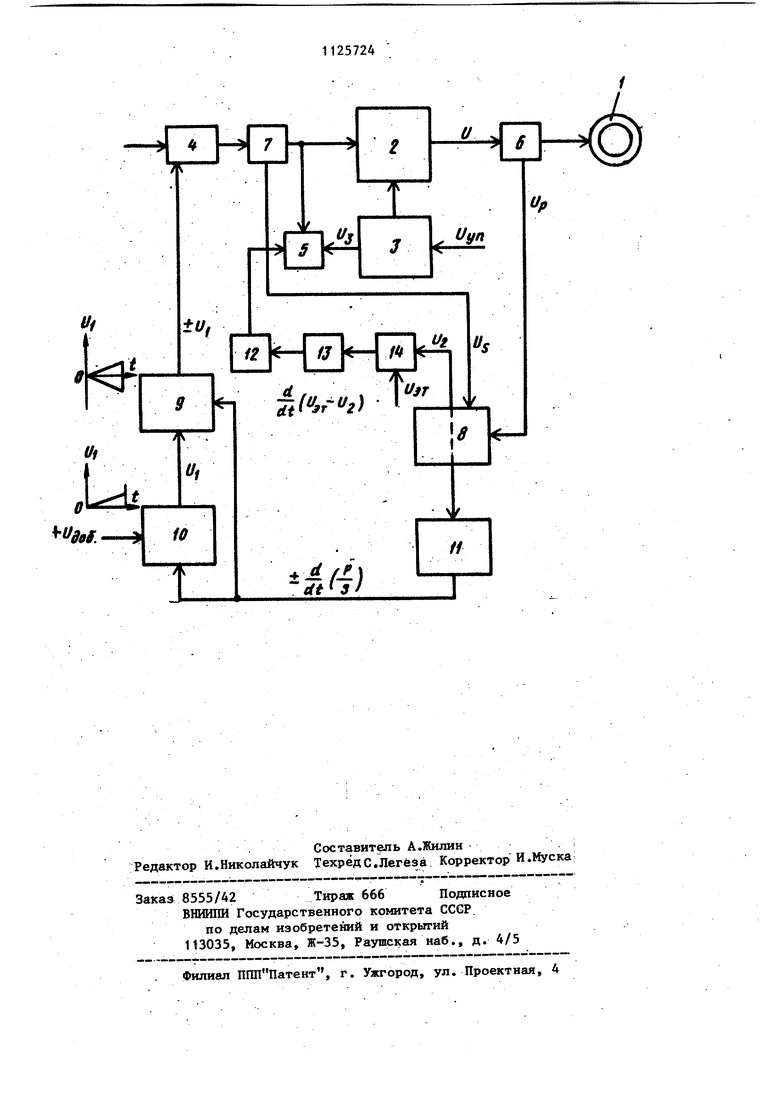
Изобретение относится к электротехнике, в частности к частотно-регулируемым электроприводам, и может быть использовано в системах с автономным питанием, где требования снижения потерь мощности и высокого КПД являются определяющими. Известен частотно-регулируемый электропривод, содержащий асинхрон.ный двигатель с короткозамкнутым ро тором, статорные обмотки которого .подключены к выходам преобразовател частоты, соединенного управляющими входами с выходами системы управлен преобразователем частоты, датчики фазных токов и напряжений, подключенные к входам нуль-органа, выходы которого связаны с выходами системы управления преобразователем частоты В электроприводе осуществляется ре гулирование коэффициента мощности Щ Недостатками данного электропривода являются конструктивная сложность и низкая надежность. Наиболее близким к изобретению п технической сущности является частот но-регу шруемый электропривод, содержаЕЦИй асинхронный двигатель с короткозамкнутым ротором, статорные обмотки которого подключены к выход обобщенного блока регулирования напряжения, снабженного входами для подключения питающей сети переменно го тока и управляющими входами и включающего в свой состав преобразо ватель частоты с системой управлени и блок автоматической компенсации р активной мощности, датчик тока статора, выход которого подключен к фу циональному преобразователю с экспо ненциальной характеристикой, соединенного выходом с входом инерционного звена, датчик напряжения стато ра, выход которого и выход инерционного звена подклюгчены к управляющим входам обобщенного блока регулирования напряжения. В электропривод введены датчик потока и последо вательно соединенные блок задания частоты и блок регулирования частоты, выход Которого связан с асинхронным двигателем с короткозамкнутым ротором, при этом вь1ход датчика потока соединен с дополнительно введенным управлякяцим входом обобщенного блока регулирования напряже ния, снабженного дополнительным рег лятором потока 2 . Недостатками известного частотнорегулируемого электропривода являются сложность, а также невысокие энергетические показатели, так как сист.ема регулирования вьтолняет оптимизацию либо по минимуму тока статора, либо по минимуму потерь активной мощности, либо по коэффициенту мощности в не решает комплексной задачи по одновременному повышению КПД и коэффициента мощности. Целью изобретения является повышение энергетических показателей путем снижения потерь мощности и одновременного повышения КПД и коэффици.нта мощности. Указанная цель достигается тем, что в частотно-регулируемый электропривод, содержащий асинхронный двиг.атель с короткозамкнутым ротором, статорные обмотки которого подключены к выходам преобразователя частоты, соединенного управляюш 1ми входами с выходами системы управления преобразователем частоты, а силовыми входами - с выходаг-ш блока регулирования напряжения питания, снабженного входами для подключения пи такщей сети переменного тока и управляющим входом, блок автоматической компенсации реактивной мощности, связанный с выходами системы управления преобразователем частоты и с выходами блока регулирования напряжения питания, введены датчики активной и полной мощности, установленные соответственно на выходе и входе преобразователя частоты, блок деления, последовательно соединенные управляемь1й ключ, интегратор и первьй элемент дифференцирования, последовательно соединенные вентильный элемент, второй элемент дифференцирования и элемент сравнения, при этом выходы датчиков активной и полной мощности подключены к входам блока деления, выход.которого соединен с входом элемента сравнения и с входом первого элемента дифференцирования, подключенного выходом к управляющему входу управляемого ключа, выход которого соединен с управляющим входом блока регулирования напряжения питания, а выход вентильного элемента,подключен к дополнительно введенному управляющему входу блока автоматичес кой компенсации реактивной мощности. На чертеже представлена функциональная схема частотно-регулируемого электропривода. Устройство содерясит асинхронный двигатель 1 с короткозамкнутым ротором, статорные обмотки которого подключены к выходам преобразователя 2 частоты, соединенного управляющими входами с выходами системы 3 управления преобразователем 2 частоты, а силовыми входами - с вы. ходами блока 4 регулирования напряжения питания, снабженного входами для подключения питающей сети пе- : ременного тока и управляющим входом блок 5 автоматической кo ffleнcaдии реактивной мощности, связанный с вы ходами системы 3 управления ттреобра зователем частоты и с выходами блок 4 регулирования напряжения питания, датчики активной и полной мощности 6 и 7, установленные соответственно на выходе и входе преобразователя 2 частоты, блок 8 деления, последо вательно соединенные управляемьй клю 9, интегратор 10 и первый элемент 1 дифференцирования, последовательно соединенные вентильный элемент 12, второй элемент 13 дифференцирования и элемент 14 сравнения, при этом выходы датчиков активной и полной мощности 6 и 7 подключены к входам блока 8 деления, выход которого соедине с входом элемента 14 сравнения и с вх дом первого элемента 11 дифференцирова ния,подключенного выходом к управлякщ - йу входу управляемого ключа 9, выход к торого соединен с управляющим входом блока 4 регулирования напряжения, питания, а выход вентильного элемента подключен к дополнительно вв€1денному управляющему входу блока 5 автоматической компенсации реактивной мощнос ти. Частотно-регулируемый электропривод работает следукщим образом. СГ выходов. датчиков активной и пол ной мощности 6 и 7. поступают напряжения Up , Ug , пропорциональные соответственно активной Р и полнойS мощностям, потребляемым в электроприводе . С помощью блока 8 деления определяется отношение Р/5, равное комплексному электрическому показателю в виде произведения КПД преобразователя, 2 частоты „ц и коэффициента мощности , т.е. -со Ппч- . () Полученный по формуле (1) сигнал поступает на входы двух контуров регулирования . В первом контуре регулирования на выходе первого элемента 11 дифференцирования формируется сигнал, пропорциональный производной - icostf.qnJ. 3 сигнал имеет поotложительный знак при увеличении (созс.2пч) и отрицательный при уменьшении (costf- nv Назначение сигнала, пропорционального этой производной, совместно с другими элементами контура регулирования по производной состоит в том, чтобы предотвратить уменьшение показателя (co9 -f2nu) изза увеличения потерь iP в преобразователе 2 частоты, которые при Р зависят от U параболически: iP-l -R.,где 1 - ток статора асинхронного двигателя 1, - Эквивалентное сопротивление преобразователя 2 частоты, т.е. с уходом напряжения U на выходе преобразователя 2 частоты от оптимального закона регулирования и с увеличением ЬР снижается 1 Поддержание максимума к обеспечивается с помощью контура регулирования по производной - (costp- пч ) При этом интегратор 10 включается в работу только при появлении на его . входе отрицательного сигнала указанной производной, а управляемый ключ 9 при каждом появлении отрицательного знака производной меняет полярность сигнала U, на выходе, который поступает на управлякнций вход блока 4 регулирования напряжения питания, увеличивая его выходное напряжение при положительном знаке Ч и уменьшая при отрицательном (при вьятолнении блока 4 регулирования напряжения питания в виде синхронного генератора управляющий сигнал U| поступает в. систему воз- бyждeни указанного генератора) . В результате на выходе блока 4 регулирования напряжения питания поддерживается напряжение, близкое оптимально, в связи с чем и потери АР поддерживаются близкими к минимальным значениям, а ij - к мак..симальному значению. ftlfeH.HiiHocTb нарастания управляю щего Йн ряжения Hi определяется настройжой интегратора 10 и величиной добавочного напряжения , поступаю цего на его вход При положительном знаке производной на выходе элемента 11 дифференцирования интегратор 10 и управляемый ключ 9 находятся в выялпченном СОСТОЯНИИ. ВторсЛ контур регулирования предкв амачен для обеспечения максимума cejKlp. ffpA этом сигнал 112, пропорцио«жмыш полученному в блоке 8 деления отношению P/S, поступает на вход элемента 14 сравнения, где формирует ся разность - U ( эталонное капршкение, которое выбирается соотввтствуювщм соотношению , т.е. таким образом, чтобы разность быпа заведомо всегда положительной) . На выходе второго элемента 13 диф-25 ков ференщ{рования формируется сигнал, пропорциональный производной -п , а на выходе вентильного элемента 2 - полсокительрое значение указанной производной, соответствую- 30 щее уменьшению показателя (Cosif цц) . /С помощью блока 5 автоматической ,. комяеисации реактивной мся ности осуществляется регулирование значения опережающего тока конденсаторов, ком-. пенсируйщего индуктивную составляющую .тока -на-входе преобразователя 2 час1
,виде произведения (о5 12„ц) .
Таким образом, введение в частотно-регулируемый электропривод датчи246тоты Управление блоком 5 автоматической компенсации реактивной мощности (путем регулирования угла отпирания семисторов или встречно-параллельно включенных тиристоров, входяп их в его состав) производится по . выходным сигналам системы 3 управления и дополнительно сигналом с выхода вентильного элемента 12; По достижении состояния полной компенсации реактивных токов производная (U.-U) становится сначала равной нулю, а затем может сменить знак на отрицательный. При этом управляю|ций сигнал с выхода вентильного элемента 12 не поступает. i Совместное действие рассмотренных контуров регулирования обеспечивает максимальное значение комплексного энергетического показателя в активной и полной мощности, блока деления и двух контуров регулирования, первый из которых составлен, из первого элемента дифференцирования, интегратора и управляемого ключа, а второй - из элемента сравнения, второго элемента дифференцирования и вентильного элемента, обеспечивает поддержание максимальными значений КПД и коэффициента мощности сбЗ и снижение потерь мощности в сравнении с известным частотно-регулируемым электроприводом.

| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С ЭКСТРЕМАЛЬНЫМ УПРАВЛЕНИЕМ | 1992 |
|
RU2069034C1 |
| Электропривод | 1981 |
|
SU1083319A1 |
| Частотно-регулируемый асинхронный электропривод | 1983 |
|
SU1119155A1 |
| Частотно-управляемый электропривод | 1988 |
|
SU1527701A1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Электропривод переменного тока | 1979 |
|
SU836750A1 |
| Регулируемый асинхронный электропривод | 1981 |
|
SU955483A1 |
| Устройство для частотного управления электроприводом | 1982 |
|
SU1089749A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД, содержащий асинхронный двигатель с короткозагаснутым ротором, стАторные обмотки которого подключены к выходам преобразователя частоты, I соединенного управлякщими входами с выходами системы управления пре- образователен частоты, а силовыми входайи - с выходами блока регулирования напряжения питания, снабженного входамиГ для подключения питающей сети переменного тока и управляющим входом, блок автоматической компенсации реактивной мощности, j связанный с выходами сисЛгемы управления преобразователем частоты и с выходами блока регулирования напрйжения питания, о т. л и ч а ю щ и йс я тем, что, , с целью повьщгекия Энергетических показателей путем снижения потерь мощности, введены датчики ак тивной и полной мощности, установленные соответственно на выходе и входе преобразователя частоты, блок деления, последовательно соединенные управляемый ключ, интегратор и первый элемент дифференцирования, последовательно соединенг ные вентильный элемент, второй элемент дифференцирования и элементсравнения, при этом выходы датчиков активной и полной мощности подключены к входам блока деления, выход которого соединен с входом элемента сравнения и с входом первого элемента дифферен1шрования, подключенного выходом к управляющему входу к1 управляемого ключа выход которого соединен с управлякшцим входом блока регулирования напряжения питания, выход вентильного элемента подключен Й1 к дополнительно введенному управляют щему входу блока автоматической компенсации реактивной, мощности.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Леонтьев В.В., Пономарь С.Г | |||
| Способ измерения коэффициента мощности асинхронного короткрзамкнутого двигателя, работающего от тиристорного преобразователя частоты,-Сб | |||
| Преобразовательная техника к ав томатизированный электропривод,1978 | |||
| с | |||
| Контрольный стрелочный замок | 1920 |
|
SU71A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Асинхронный электропривод с экстремальным управлением | 1978 |
|
SU888319A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| : | |||
