преобразователя частота - напряжение, а второй вход - с выходом датчика амплитуды напряжения, подключенного входами к фазным выходам преобразователя частоты с непосредственной связью.


| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод | 1980 |
|
SU1185527A1 |
| Электропривод переменного тока | 1986 |
|
SU1345302A1 |
| Электропривод переменного тока | 1986 |
|
SU1378004A1 |
| Электропривод переменного тока | 1984 |
|
SU1272459A1 |
| Электропривод переменного тока | 1987 |
|
SU1439728A2 |
| Электропривод переменного тока | 1984 |
|
SU1185528A1 |
| Электропривод переменного тока | 1984 |
|
SU1251281A1 |
| Электропривод с асинхронной короткозамкнутой машиной | 1972 |
|
SU699639A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| Электропривод | 1981 |
|
SU1083319A1 |
УСТРОЙСТВО ДЛЯ ЧАСТОТНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ, содержащее преобразователь частоты с непосредственной связью, фазные выходы которого предназначены для подключения асинхронного двигателя с короткозамкнутым ротором, а фазные управляющие входы соединены с выходами первого, второго и третьего сумматоров, первый блок прямого преобразования координат, фазные выходы которого подключены соответственно к первым входам четвертого, пятого и шестого сумматоров, подключенных выходами к входам соответствующих фазных регуляторов тока, выходы которых соединены соответственно с первыми входами первого, второго и третьего сумматоров, второй блок прямого преобразования координат, фазные выходы которого подключены соответственно к вторым входам первого, второго и третьего сумматоров, датчики фазных токов статора, выходы которых подключены соответственно к вторым входам четвертого, пятого и шестого сумматоров, блок задания реактивного тока, связанный выходом с управляющим входом первого блока прямого преобразования координат, блок задания частоты, выход которого подключен к входу преобразователя частота - напряжение, связанного выходим с управляющим входом второго блока прямого преобразования координат, и к входу формирователя гармонических сигналов, выходы которого подключены к входам для опорных сигналов первого и второго блоков прямого преобразования координат, отличаю.щ веся тем, что, с целью расширения функциональных возможностей за счет обеспечения управления как .одним так и N (N 2, 3, 4,.,,) асинхронными двигателями с короткозамкнуть с: тором, статорные обмотки которых в фазах включены параллельно одна другой, введены датчик амплитуды Напряжения, два блока деления, регулятор напряжения, регулятор активного тока и фазовый дискриминатор, входы которого подключены к фазным выходам первого блока прямого преобразования координат и к выходам датчиков фазных токов статора, а выход 00 к входу регулятора активного тока, соединенного выходом с первым управсо лякяцим входом первого блока прямого преобразования координат, при этом -vl выход блока задания реактивного то4 ка подключен к входу делимого первой СО блока деления, выход которого подключен к второму управляющему входу первого блока прямого преобразования координат, выход блока зада ния частоты подключен к входу делимого второго блока деления, выход которого подключен к управляющему входу второго блока прямого преобразования координат, входы делителей обоих блоков деления объеди-нены между собой и подключены к выходу регулятора напряжения, первый вход которого соединен с выходом
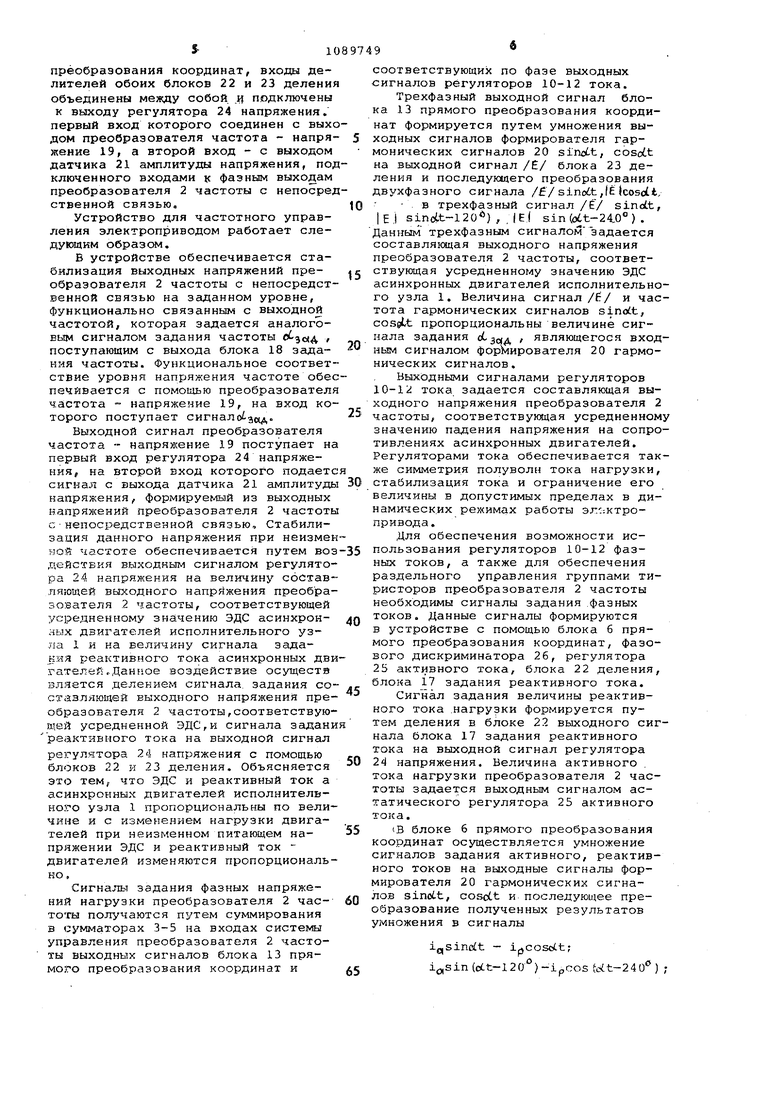
Изобретение относится к электротехнике, в частности к асинхронным частотно-регулируемым электроприводами, и может быть использовано для одновременного регулирования ск рости нескольких асинхронных двигателей с короткозамкнутым ротором, статорные обмотки которых включены параллельно друг другу и питаются о одного тиристорного преобразователя частоты с непосредственной связью, например, для регулирования скорости транспортных рольганговых линий прокатных станов. Известно устройство для частотно го управления электроприводом, соде жащее преобразователь частоты с непосредственной связью, фазные выходы которого служат для подключения асинхронного двигателя с короткозам кнутым ротором,а фазные управляющие входы соединены с выходом регуляторов фазных токов, входы которых через блоки преобразования координат подсоединены к выходам регуляторов активного и реактивного токов и дат чиков Холла, установленных в воздуш ном зазоре асинхронного двигателя, при этом входы регулятора активного и регулятора реактивного токов подсоединены соответственно к выходам регуляторов скорости и потока 1. Известное устройство не может ос дествлять управление несколькими параллельно включенными и по разному нагруженными асинхронными двигателями. Наиболее близким техническим реш нием к предлагаемому является устро ство для частотного управления электроприводом, содержащее преобразователь частоты с непосредственной связью, фазные выводы которого предназначены для подключения асинхронного двигателя с короткозамкнутым ротором, а фазные управляющие входы соединены с выходами первого, второго и третьего сумматоров, первый блок прямого преобразования координат, фазные выходы которого подключены соответственно к первым входам четвертого, пятого и шестого сумматоров,-подключенных выходами к входам соответствующих фазных регуляторов тока, выходы которых соединены соответственно с первыми входами первого, второго и третьего сумматоров, второй блок прямого преобразования координат, фазные выходы которого подключены соответственно к вторым входам первого, второго и третьего сумматоров, датчики фазных токов статора, выходы которых подключены соответственно к вторым входам четвертого пятого и шестого сумматоров, блоки задания активного и реактивного токов, подключенные выходами к управляющим входам первого блока прямого преобразования координат, блок задания частоты, выход которого связан с управляющими входами второго блока преобразования координат, формирователь гармонических сигналов, вход которого подключен к выходу блока задания частоты, а выходы соединены с входами для опорных сигналов первого и второго блоков прямого преобразования координат, тахогенератор, установленный на валу асинхронного двигателя и подключенный выходом к входам блока задания частоты и блока задания активного тока, при этом выходы блоков задания активного и реактивного токов связаны с управляющими входами второго блока прямого преобразования координат 2, Указанное устройство имеет ограниченные функциональные возможности и не может быть использовано для регулирования скорости нескольких параллельно включенных и по разному нагруженных асинхронных двигателей. Цель изобретения - расширение функциональных возможностей устройства для частотного управления электроприводом за счет обеспечения управления как одним, так и N (N , 2, 3, 4,...) асинхронными двигателями с короткозамкнутыми роторами, статорные обмотки которых в фазах включены параллельно одна другой. Указанная цель достигается тем, что в устройство для частотного управления электроприводом, содержащее преобразователь частоты с непосредственной связью, фазные выходы которого предназначены для подключения асинхронного двигателя с короткозамкнутым ротором, а фазные управляющие входы соединены с выходами первого, второго и третьего сумматоров, первый блок прямого преобразова ния координат, фазные выходы которого подключены соответственно к первы входам четвертого, пятого и шестого сумматоров, подключенных выходами к входам соответствующих фазных регуля торов тока, выходы которых соединены соответственно с первыми входами первого, второго и третьего сумматоров, второй блок прямого преобразова ния координат, фазные выходы которого подключены соответственно к вторым входам первого, второго и третьего сумматоров, датчики фазных токов статора, выходы которых подклю чены соответственно к вторым входам четвертого, пятого и шестого сумматоров, блок задания реактивного тока, связанный выходом с управляющим входом первого блока прямого преобразования координат, блок задания частоты, выход которого подключен к входу преобразователя частота - напряжение, связанного выходом с управ ляющим входом второго блока прямого преобразования координат, и к входу формирователя гармонических сигналов выходы которого подключены к входам для опорных сигналов первого и второго блоков прямого преобразования координат, введены датчик амплитуды напряжения,два блока деления, регул тор напряжения, регулятор активного тока и фазовый дискриминатор, входы которого подключены к фазным выходам первого блока прямого преобразования координат и к выходам датчиков фазных токов статора, а выход к входу регулятора активного тока, соединенного выходом с первым управляющим входом первого блока прямого преобразования координат, при этом выход блока задания реактивного тока подключен к входу делимого первого блока деления, выход которого подключен к второму управляющему вхо ду первого блока прямого преобразова ния координат, выход блока задания частоты подключен к управляющему входу второго блока прямого преобразования координат, входы делителей обоих блоков деления объединены между собой и подключены к выходу регулятора напряжения, первый вход которого соединен с выходом преобразователя частота - напряжение. а второй вход - с выходом датчика амплитуды напряжения, подключенного входами к фазным выходам преобразова теля частоты с нопосредственной связью. На чертеже показана функциональная схема устройства для частотного управления электроприводом. Устройство для частотного управления электроприводом содержит исполнительный узел 1, представляющий собой N (N 2, 3, 4,...) асинхронных двигателей с коротко амкнутым ротором, статорные обмотки которых в фазах включены параллельно одна другой и подключены к фазным выходам преобразователя 2 частоты с непосредственной связью, соединенного фазными управляющими входами с выходами первого, второго и третьего сумматоров 3, 4 и 5, первый блок 6 прямого преобразования координат, фазные выходы которого подключены соответственно к первым входам четвертого, пятого и шестого сумматоров 7, 8 и 9, подключенных выходами к входам соответствующих фазных регуляторов тока 10, 11 и 12, выходы которых соединены соответственно с первыми входами первого, второго и третьего сумматоров 3, 4 и 5, второй блок 13 прямого преобразования координат, фазные выходы которого подключены соответственно к вторым входам первого, второго и третьего сумматоров 3, 4 и 5, датчики 14, 15 и 16 фазных токов статора, выходы которых подключены соответственно к вторым входам четвертого, пятого и шестого сумматоров 7,8 и 9, блок 17 задания реактивного тока, связанный выходом с управляющим входом первого блока 6 прямого преобразования координат, блок 18 задания частоты, выход которого подключен к входу преобразователя частота - напряжение 19, связанного выходом с управляющим входом второго блока 13 прямого преобразования координат, и к входу формирователя 20 гармонических сигналов, выходы которого подключены к входам для опорных сигналов первого и второго блоков 6 и 13 прямого преобразования координат. В устройстводля частотного управления электроприводом введены датчик 21 амплитуды напряжения, два блока 22 и 23 деления, регуляTop 24 напряжения, регулятор 25 активного тока и фазовый дискриминатор 26, входы которого подключены к фазным выходам первого блока 6 прямого преобразования координат и к выходам датчиков 14-16 фазных токов статора, а выход подключен к входу регулятора 25 активного тока, соединенного выходом с первым управляющим входом первого блока 6 прямого преобразования координат, при этом выход блока 17 Зсщания реактивного тока подключен к входу делимого первого блока 22 деления, выход которого подключен к второму управляющему входу первого блока 6 прямого преобразования координат, выход блока 18 задания частоты подключен к входу делимого второго блока 23 деления, выход которого подключен к управляющему входу второго блока 13 прямого
преобразования координат, входы делителей обоих блоков 22 tt 23 деления объединены между собой д подключены к выходу регулятора 24 напряжения, первый вход которого соединен с выходом преобразователя частота - напряжение 19, а второй вход - с выходом датчика 21 амплитуды напряжения, подключенного входами к фазным выходам преобразователя 2 частоты с непосредственной связью,
Устройство для частотного управления электроприводом работает следующим образом.
В устройстве обеспечивается стабилизация выходных напряжений преобразователя 2 частоты с непосредственной связью на заданном уровне, функционально связанным с выходной частотой, которая задается аналоговым сигналом задания частоты (А поступающим с выхода блока 18 задания частоты. Функциональное соответствие уровня напряжения частоте обеспечивается с помощью преобразователя частота напряжение 19, на вход которого поступает сигнало зил
Выходной сигнал преобразователя частота напряжение 19 поступает на первый вход регулятора 24 напряжения, на второй вход которого подаетс сигнал с выхода датчика 21 амплитуды напряжения, формируемый из выходных напряжений преобразователя 2 частоты снепосредственной связью. Стабилизация данного напряжения при неизменной частоте обеспечивается путем воз Дуэйствкя выходным сигналом регулятора 24 напряжения на величину составляющей выходного напряжения преобразователя 2 частоты, соответствующей усредненному значению ЭДС асинхронных двигателей исполнительного узла 1 и на величину сигнала задания реактивного тока асинхронных двигателей.Данное воздействие осущеста вляется делением сигнала, задания состазляющей выходного напряжения преобразователя 2 частоты,соответствующей усредненной ЭДС,и сигнала задани реактивного тока на выходной сигнал регулятора 24 напряжения с помощью блоков 22 и 23 деления. Объясняется это тем, что ЭДС и реактивный ток а асинхро 1ных двигателей исполнителвного узла 1 пропорциональны по величине и с изменением нагрузки двигателей при неизменном питающем напряжении ЭДС и реактивный ток двигателей изменяются пропорционально.
Сигналы задания фазных напряжений нагрузки преобразователя 2 час-тоты получаются путем суммирования в сумматорах 3-5 на входах системы управления преобразователя 2 частоты выходных сигналов блока 13 прямого преобразования координат и
соответствующих по фазе выходных сигналов регуляторов 10-12 тока.
Трехфазный выходной сигнал блока 13 прямого преобразования координат формируется путем умножения выходных сигналов формирователя гармонических сигналов 20 , cosoit на выходной сигнал /Ё/ блока 23 деления и последующего преобразования двухфазного сигнала / /sini5it,|E tcosott/ в трехфазный сигнал /Ё/ sinott, IEJ sinci.t-120) , , |Е( sin (o6t-24,0° ) . Данным трехфазным сигналом задается составляющая выходного напряжения преобразователя 2 частоты, соответствующая усредненному значению ЭДС асинхронных двигателей исполнительного узла 1. Величина сигнал /Ё/ и частота гармонических сигналов sinott, пропорциональны величине сигнала задания , являющегося входным сигналом формирователя 20 гармонических сигналов.
Выходными сигналами регуляторов 10-12 тока задается составляющая выходного напряжения преобразователя 2 частоты, соответствующая усредненном значению падения напряжения на сопротивлениях асинхронных двигателей. Регуляторами тока обеспечивается также симметрия полуволн тока нагрузки, стабилизация тока и ограничение его величины в допустимых пределах в динамических режимах работы эгс:ктропривода.
Для обеспечения возможности использования регуляторов 10-12 фазных токов, а также для обеспечения раздельного управления группами тиристоров преобразователя 2 частоты необходимы сигналы задания фазных токов. Данные сигналы формируются в устройстве с помощью блока б прямого преобразования координат, фазового дискриминатора 26, регулятора 25 активного тока, блока 22 деления, блока 17 задания реактивного тока.
Сигнал задания величины реактивного тока .нагрузки формируется путем деления в блоке 22 выходного сигнала блока 17 задания реактивного тока на выходной сигнал регулятора 24 напряжения. Величина активного тока нагрузки преобразователя 2 частоты задается выходным сигналом астатического регулятора 25 активного тока.
(В блоке 6 прямого преобразования координат осуществляется умножение сигналов задания активного, реактивного токов на выходные сигналы формирователя 20 гармонических сигналов sinoit, cosott и последующее преобразование полученных результатов умножения в сигналы
iqSinoit - ipjCOsoCt; iQ,sin(oCt-12o)-ipCOS teit-240)
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Дацковский Л.Х | |||
| , Тарасенко Л.М ., Кузнецов И.С., Бабичев Ю.Е, Синтез систем подчиненного регулирования в асинхронных электроприводах с непосредственным преобразователем частоты | |||
| -- Электричество , 1975,и 9 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод | 1978 |
|
SU782114A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
