(54) ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с асинхронной машиной с фазным ротором | 1973 |
|
SU517126A1 |
| Устройство для управления электроприводом переменного тока | 1977 |
|
SU738090A1 |
| Электропривод с асинхронным короткозамкнутым двигателем | 1976 |
|
SU615584A1 |
| Электропривод переменного тока | 1984 |
|
SU1464276A1 |
| Электропривод с асинхронной короткозамкнутой машиной | 1975 |
|
SU647828A1 |
| Электропривод с асинхронным двигателем с массивным обмотанным ротором | 1976 |
|
SU610276A1 |
| Электропривод с машиной переменного тока | 1976 |
|
SU649114A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1976 |
|
SU614511A1 |
| Электропривод с регулированием активной и реактивной энергии от сети ограниченной мощности | 1978 |
|
SU884065A2 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
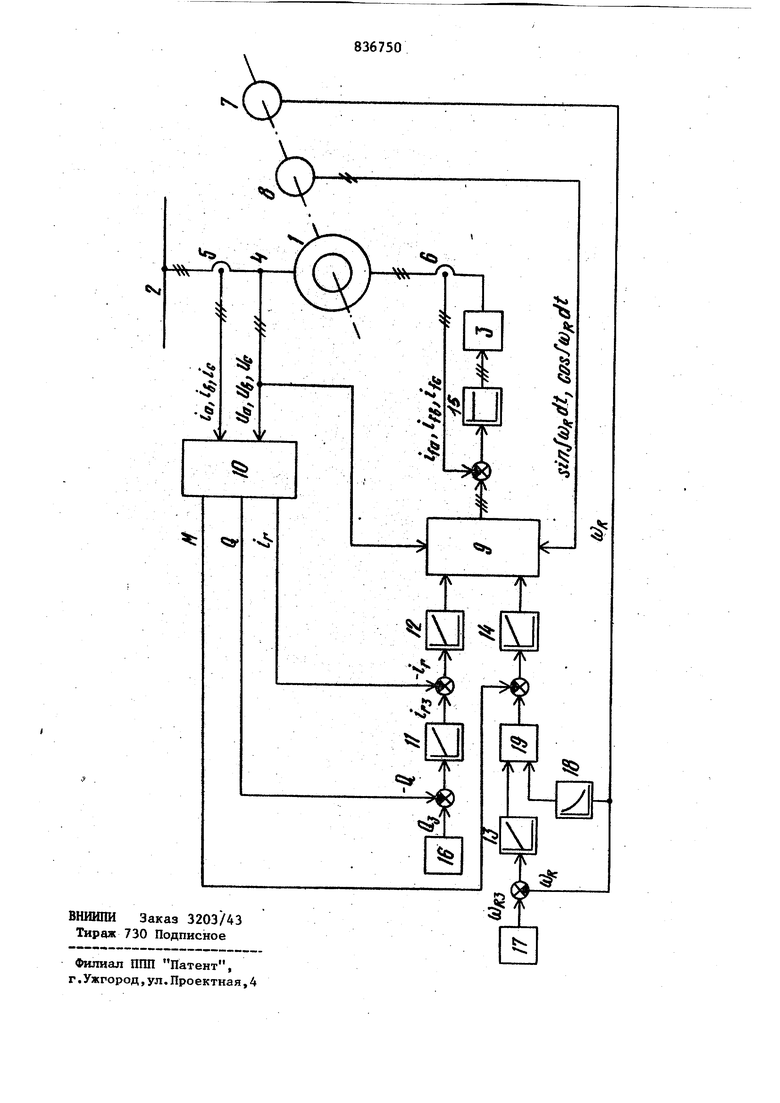
Изобретение относится к электротехнике и может быть использовано в электроприводе переменного тока с машиной двойного питания и частотно регулируемым асинхронным электродвигателем. Известен электропривод переменного тока ill с машиной двойного питания с двумя ка.налами регулирования, работающими на нулевой частоте, один из которых сформирован элементами ре гулйрования реактивной мощности, а другой - элементами регулирования ско рости. Недостатком известного устройства является наличие датчиков Холла, снижающих надежность и усложняющих струк туру электропривода. Известен также электропривод переменного тока L2 , содержащий асинхрон ный электродвигатель с фазным рото-. ром, статорные обмотки которого присоединены к сети, а роторные - к выхо ду преобразователя частоты с контуром регулирования фазных токов, датчики напряжения и тока статора, скорости и углового положения.ротора, блоки прямого и обратного преобразователей координат, регулятор, содержащий два канала формирования переменных режима, первой из которых содержит последовательно соединенные пропорционально-, интегральные регуляторы реактивных мощности и тока статора, второй канал регулятора содержит пропорциональноинтегральные регуляторы скорости и электромагнитного момента, каждый из которых снабжен на входе элементов сравнения и охвачен отрицательной обратной связью. , Однако известные устройства обладают существенным недостатком, состоящим в том, что качество регулирования переменных сильно зависит от точности настройки системы регулирования, т.е. от точности вычисления момента и компенсирующих сигналов, что снижает надежность обеспечения 3 . . 83 наперед заданного соответствия про|цессов технически-оптимальным. I Целью изобретения является повы шение надежности и качества регулирования . Указанная цель достигается тем, что в регулятор электропривода введены блоки дифференцирования скорости и суммирования сигналов управления, причем выход последнего соединен с задающим входом элемента сравнения регулятора электромагнитного момента, его первый вход соединен с выходом регулятора скорости, а второй - с выходом блока дифференцирования скорости, вход которого подключен к выходу датчика скорости вращения ротора. На чертеже изображена схема устройства применительно к машине двойного питания. Электропривод содержит асинхронную машину с фазным ротором 1, обмотки статора которой соединены с сетью 2 переменного тока, а обмотки ротора - с выходом преобразователя 3 частоты, датчик 4 напряжения, датчик 5 тока статора, датчик 6 тока ротЪра, датчик 7 скорости вращения и датчик 8 углового положения ротора, блок 9 прямого и блок 10 обратного преобразователейкоординат, пропорционально-интегральный регулятор 11 реактивной мощности, пропорционально интегральный регулятор J 2 реактивного тока, пропорционально-интегральный регулятор 13 скорости вращения ротора, пропорционально-интегральный регулятор 14 электромагнитного момента пропорциональный регулятор 15 фазных токов ротора, каждый вход которого снабжен элементом сравнения и которы охвачен отрицательными обратными свя зями, задающие блоки реактивной мощности 16 и скорости ротора 17, введе ные блоки 18 дифференцирования скоро ти и блок 19 суммирования сигналов управления. Входы блока 10 соединены с выхода ми датчиков 4, 5, а выходы - с элементами сравнения регуляторов 11, 12, 14. Входы блока 9 соединены с выходам регуляторов 12 и 14 и выходами датчи ков 4 и 8, а выходы - с первыми вход ми элементов сравнения регулятора 13 в.торые входы которых соединены с выходами датчика 6 ротора. Первый канал регулирования реакти ных мощности и тока статора образует последовательно соединенные блоки 16, 11, 12. Второй канал регулирования скорости вращения ротора и электромагнитного момента .образует последовательно соединенные блоки 17, 13, 19, 14. Выход датчика 7 ротора соединен с входами блока 18 элемента сравнения регулятора 13. Устройство работает следующим образом. Первый канал регулирования отрабатывает задающий сигнал,, вырабатываемый в блоке 16 с использованием непрерывной информации о реактивных мощности и тока статора. Второй канал регулирования отрабатывает задающий сигнал, вырабатываемый в блоке 17 с использованием непрерывной информации о скорости ротора, производной скорости ротора и величине электромагнитного момента. Оба канала регулирования построены в ортогональной системе координат, жестко связанной с вектором напряжения питающей сети, что обусловило применение блоков прямого 9 и обратного 10 преобразователей координат. При этом нет необходимости вычислять и вводить в каналы регулирования компенсирующие перекрестные связи. Качество процессов регулирования перемещенных режима гарантировано. Формула изобретения Электропривод переменного тока, содержащий асинхронный электродвигатель с фазным ротором, статорные обмотки которого присоединены к сети, а роторные - к выходу преобразователя частоты с контурами регулирования фазных токов, датчики напряжения и тока статора, скорости и углового положения ротора, блоки прямого и обратного преобразователей координат, регулятор, содержащий два канала формирования переменных режима, первьй из которых содержит последовательно соединенные пропорционально-интегральные регуляторы реактивных мощности и тока статора, второй канал регулятора содержит пpoпopциo aльнo-интeгpaльныe регуляторы скорости и электромагнитно,го момента, каждый из которых снабжен на входе элементом сравнения и охвачен отрицательной обратной связью, о т л и ч а ю щ и и с я тем, что.
5 8367506
с целью повышения надежности качест-Вход которого подключен к выходу датва регулирования, в него введенычика скорости вращения ротора. блоки дифференцирования скорости и
суммирования сигналов ,управления, при-Истояники информации,
чем выход последнего соединен с зада-5 принятые во внимание при экспертизе
ющим входом элемента сравнения регу-1. Авторское свидетельство СССР
лятора электромагнитного момента, его№ 517126, кл. Н 02 Р 7/42, 1977.
первый вход соединен с выходом регуля-2. Авторское свидетельство СССР
тора скорости, а второй - с выходом№ 657558, кл. Н 02 Р 5/34, Н 02 р 7/36,
блока дифференцирования скорости,1978. . .
