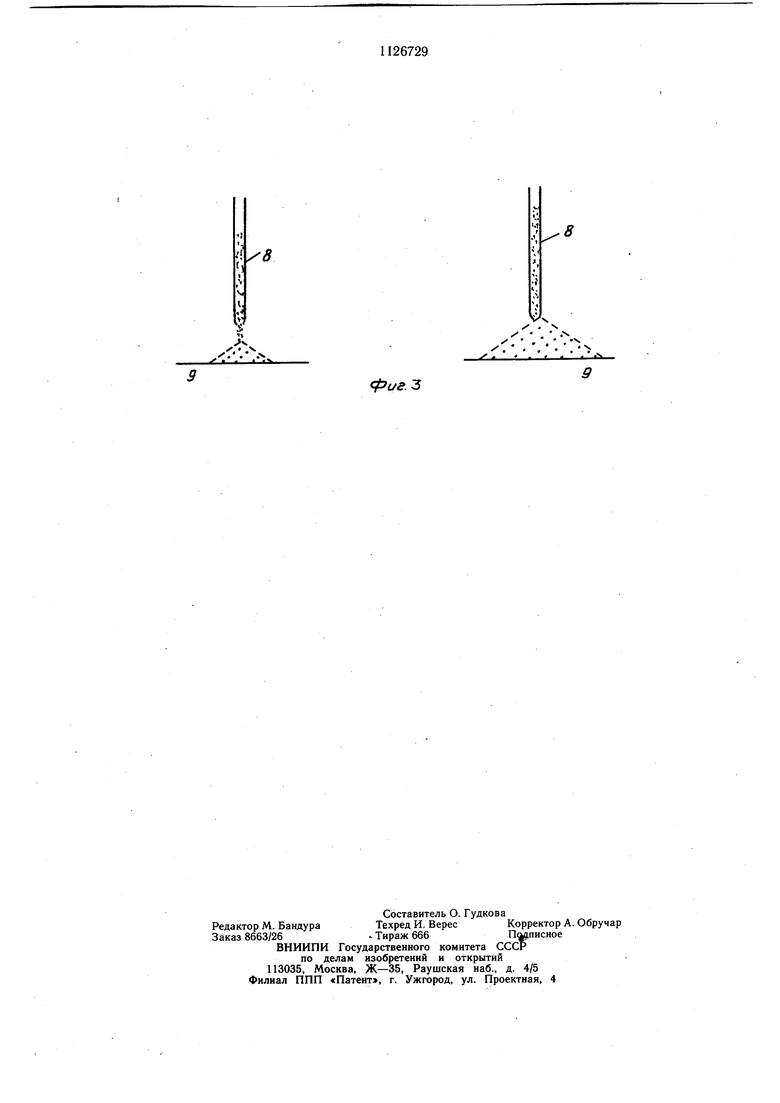
Изобретение относится к автоматическому управлению и может быть, применено для управления медленно меняющимися процессами. Известны способы управления пневматическими и гидравлическими элементами приборов и устройств, основанные на действии потоков газа или жидкости 1. Наиболее близким к изобретению является способ управления элементами автоматических устройств путем взаимодействия потоков материальной среды, переемещаемых под действием силы тяжести и движущихся под действием углами от О до 90° к вектору силы тяжести 2. Упомянутые способы управления элементами автоматических устройств не обеспечивают достаточной простоты конструкции элементов, затрудняют использование этих элементов при больщих перепадах температур и в вакууме без защитных экранов с исключением потери рабочей среды. Для реализации этих способов необходимы компрессоры, насосы, ресиверы, которые конструктивно сложны. Кроме того, в схемах необходима герметизация соединений, что в совокупности приводит к пониженной надежности устройств в работе. Целью изобретения является повыщение надежности управления медленно меняющимися процессами и расщирение области применения. Поставленная цель достигается тем, что согласно способу управления элементами автоматических устройств путем взаимодействия потоков материальной среды, перемещаемых под действием силы тяжести и движущихся под углами от О до 90° к вектору силы тяжести, в качестве материальной среды используют сыпучий материал. Кроме того, поток сыпучего материала останавливают его накоплением до соприкосновения с источником истечения. На фиг. 1 показан пример управления положением потока сыпучего материала при воздействии двух совмещенныхч потоков, движущихся под углами от О до 90° к вектору силы тяжести из каналов 1 и 2. Здесь в зависимости от наличия в каналах потоков сыпучего материала, меняется направление результирующего потока. На фиг. 2 показан пример управления положением потока сыпучего материала при переполнении проходной камеры двумя потоками сыпучего материала. Устройство содержит входные каналы 3 и 4, выходной канал 5, канал сброса 6 и рабочую камеру 7. Проходное сечение канала сброса 6 выбирается больщим проходного сечения одного входного канала, но меньщим суммарного проходного сечения обоих входных каналов. В результате поток в выходном канале 5 появляется только при совместном истечении потоков из обоих выходных каналов. На фиг. 3 показан пример остановки перемещения потока сыпучего материала в канале 8 с помощью перекрытия выходного отверстия канала поверхностью сыпучего материала, накапливаемого на плоскости 9. На этом свойстве сыпучих материалов могут быть построены коммутаторы, позволяющие управлять выходом сыпучего материала из одного канала, перекрытием этого канала сыпучим материалом, исходящим из другого канала. Реализация на основании предлагаемого способа элементов автоматики позволит упростить системы управления медленно меняющимися технологическими процессами, позволяя их использовать при высоких перепадах температур в вакууме без защитных экранов.
V
V
Л-.
%- . .-;,. N л
N.
N
рие.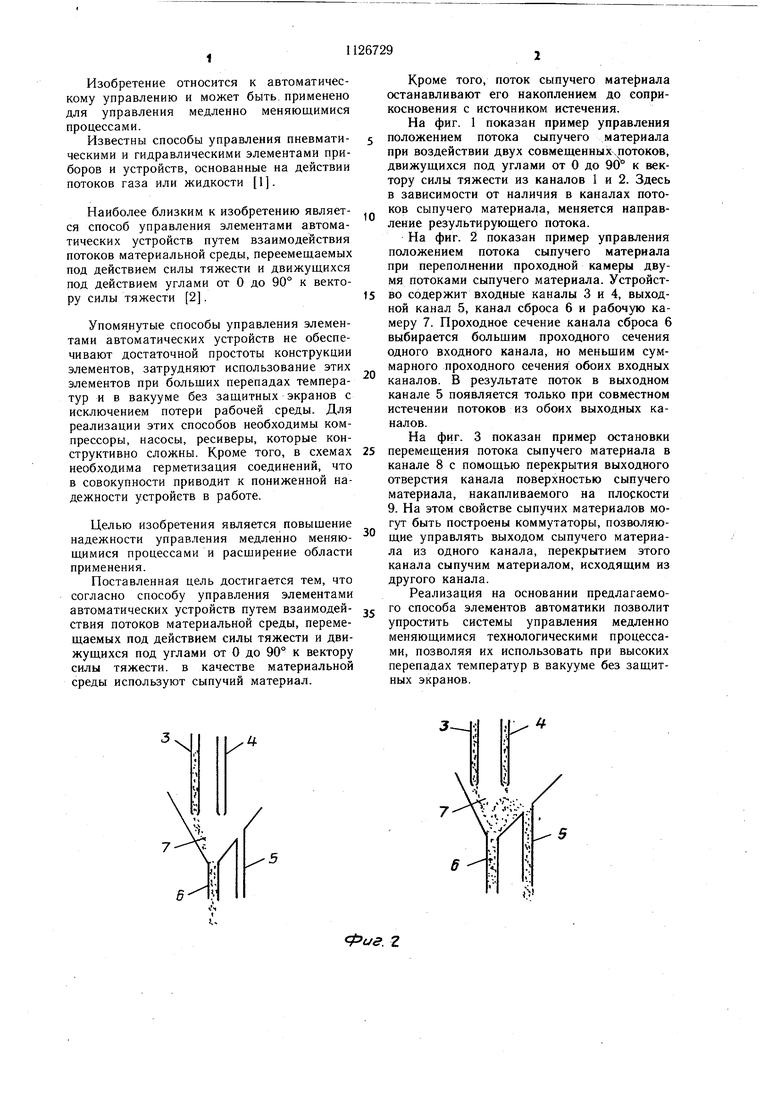
1. СПОСОБ УПРАВЛЕНИЯ ЭЛЕМЕНТАМИ АВТОМАТИЧЕСКИХ УСТРОЙСТВ путем взаимодействия потоков материальной среды, перемещаемых под действием силы тяжести и движущихся под углами от О до 90° к вектору силы тяжести, отличающийся тем, что, с целью повыщения надежиости управления медленно меняющимися процессами и расширения области применения в качестве материальной среды используют сыпучий материал. 2. Способ по п. 1, отличающийся тем, что по-гок сыпучего материала останавливают его накоплением до соприкосновения с источником истечения. / 9
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Гидравлическое логическое устройство | 1981 |
|
SU955005A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| 0 |
|
SU124720A1 | |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
