Изобретение относится к. измерител ной технике и может быть испольаовано для измерения перемещений движущихся объектов с использованием узкопредельных преобразователей, рабочий ход которых существенно меньше измеряемого перемещения. Известен преобразователь линейных перемещений объекта, содержащий корпус, размещенные в нем узкопредельный преобразователь с измерительным наконечником и взаимодействующий с ним передаточный механизм с контактным элементом,предназначенным для кон . тактирования с объектом контроля Ij Однако в известном преобразовател передаточный механизм выполнен в вид втулки с внутренней конической повер ностью, что приводит к ограничению диапазона измерения. Кроме того, передаточньш механизм конструктивно сложен и имеет значительную массу. Цель изобретения - расщирение диапазона измерения, упрощение констру ции и уменьшение массы. . Эта цель достигается тем, что в преобразователе линейных перемещений объекта, содержащем корпус, размещен ные в нем узкопредельный преобразова тель с измерительным наконечником и взаимодействующий с ним передаточный механизм с контактным элементом, предназначенным,для контактирования с ббъектом контроля, передаточньй механизм выполнен в виде последовательно устанбвленнык в корпусе по крайней мере двух упругих звеньев с различной податливостью, жестко соединенных между собой через измерительньй наконечник, конец звена с меньшей податливостью скреплен с корпусом, конец звена с большей податливостью соединен с контактным элёментЬм. - Причём упругие звенья выполнены в виде пружин разной жесткости. Кроме того, упругие звенья выполнены в виде пружин одинаковой жесткости, но с разным числом витков, при этом с корпусом скреплен конец пружины с меньшим числом витков, а сконтактным элементом - конец пружины с большим числом витков. На фиг. 1 показан преобрйзователь линейных перемещений объекта с пружи нами разной жесткости; на фиг, 2 то же, с пружинами одинаковой жесткости. Преобразователь содержит корпус 1, размещенные в нем узкопредельный преобразователь 2 с измерительным наконечником 3, взаимодействующий с ним передаточный механизм,, выполненный в виде последовательно установленных в корпусе 1 по крайней мере двух упругих звеньев с различной податливостью, в качестве которых могут быть испол1%зованы пружины 4 и 5 с разной жесткостью (или 6 и 7 с одинаковой жесткостью, но с разным числом витков), жестко соединенных между собой через .измерительный наконечник 3, конец 8 4 с большей жесткостью (или конец 9 пружины 6 с меньшим числом витков) скреплен с корпусом 1, конец 10 пружины 5 с меньшей жесткостью (ил конец 11 пружины 7 с большим числом витков) соединен с контактным элементом 12, предназначенным для контактирования с движущимся объектом 13. Преобразователь работает следующим образом. При перемещении объекта 13 с контактным элементом 12 на расстояние L змерительный наконечник 3 преобразрателя 2 перемещается на расстояние С. При использовании пружин 4 и 5 разой жесткости имеем: C.n,f, - - „ о - ,-|П., де С - удлинение пружины 4 больщей жесткости; D - удлинение пружины 5 меньшей жесткости; i 2 - максимальные. деформации одного витка пружин 4 и 5 соответственно; Z|, Z - жесткость пружин 4 и 5 сосоответственно;П, 2 количество витков пружин 4 и 5 йоответственно; -Р - усилие предварительного натяжения пружин 4-и 5. Перемещение L определяется по форулеL С + D n(f - ) + «,(4г-) Если например, использовать пруину f 370 с 25 витками, а пружину 388 с 50 витками (ГОСТ 13766-68). то получаем L 311,45 мм при С 2,48 мм. При использовании пружин 6 и 7 с одинаковой жесткостью имеем (±-1,) и D п(±-|,) и L (ni + hp (i-|,),, где С г- удлинение пружины 6 с меньшим числом витков; D - удлинение пружин 7 с большим числом витков. НапрймерО используя пружины № 388 с числом витков 5 и 40, получаем С 29,946 мм, D 239,57 мм, L 269,512 мм. 1128 5 10 t5 97 Таким образом, зная ход узкопредельного преобразователя 2 и величину измеряемого перемещения элемента 12, можно подобрать пружины, обеспечивающие необходимое суммарное перемещение. Испол зование предлагаемого преобразоватедя линейных перемещений обеспечивает расширение диапазона измерений, упрощение конструкции и уменьшение массы за счет вьшолнення передаточного механизма в виде последовательно соединенных между собой ухфугик звеньев с различной податливостью.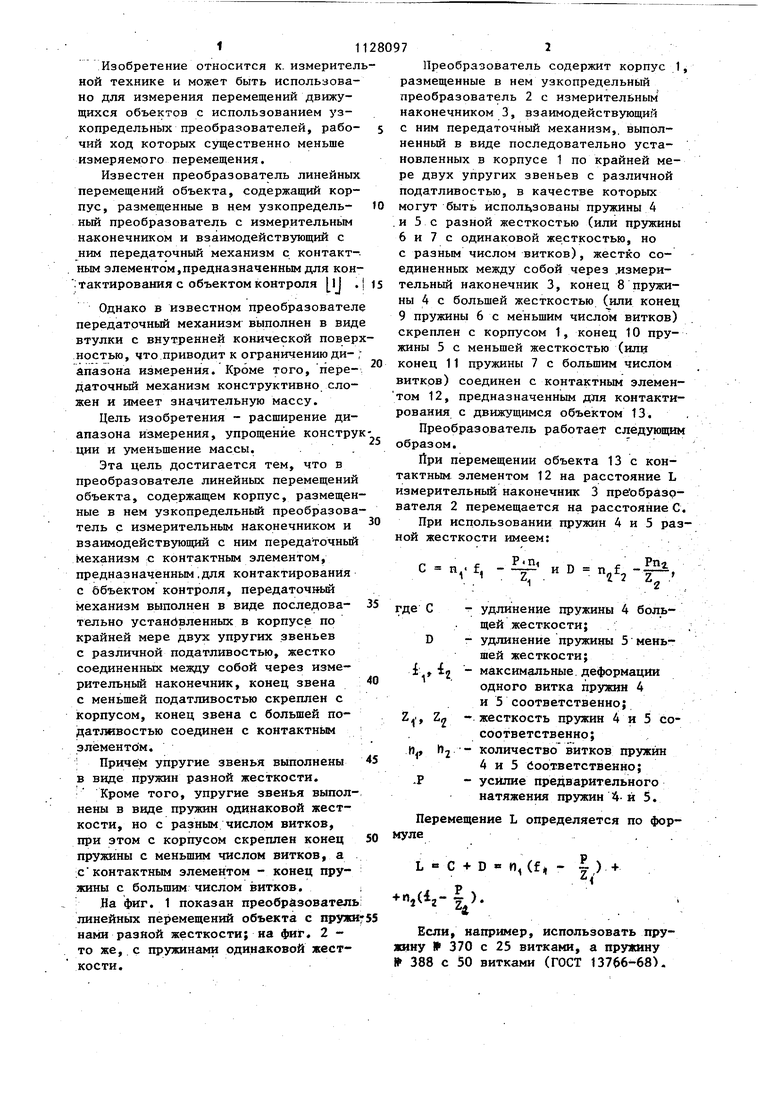

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АКТИВНОГО КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ В ПРОЦЕССЕ ОБРАБОТКИ ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2557381C2 |
| Преобразователь линейных перемещений | 1984 |
|
SU1408197A1 |
| ПРИБОР ДЛЯ ИСПЫТАНИЯ СТРОИТЕЛЬНЫХ МАТЕРИАЛОВ НА ПРОЧНОСТЬ | 2008 |
|
RU2381503C1 |
| Преобразователь линейных перемещений | 1991 |
|
SU1796864A1 |
| СПИРАЛЬНЫЙ ПРУЖИННЫЙ МЕХАНИЗМ | 2017 |
|
RU2682028C1 |
| УПРУГАЯ ГРУЗОВАЯ ПОДВЕСКА | 2006 |
|
RU2323152C1 |
| Магнитоэлектрический динамометр | 1980 |
|
SU892240A1 |
| Копировальный прибор | 1981 |
|
SU996173A1 |
| Устройство для управления деформациями в системе СПИД | 1982 |
|
SU1071371A1 |
| Измеритель ускорения и вертикального градиента силы тяжести | 1991 |
|
SU1827659A1 |
1. ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА, содержащий кор пус, размещенные в нем узкопредель ный преобразователь с измерительньм наконечником и взаимодействующий с ним передаточньвй механизм с контакт ным элементом, предназначенным для контактирования : объектом контроля отличающийся тем, что, с целью расширения диапазона измере ния, упрощения.конструкции и уменьшения массы, передаточный, механизм . шт Фиг.1 выполнен в виде последовательно установленных в корпусе по крайней мере двух упругих звеньев с различной податливостью, жестко соединенных между собой через измерительный наконечник, конец звена с меньшей податливостью скреплен; с корпусом, конец звена с большей податливостью соединен с контактньт элементом. / 2., Преобразователь по п. 1, отл и ч a ю щ и и с я тем, что, упругие звенья выполнены в виде пружин разной жесткости. 3. Преобразователь по п. 1, о т.л и ч a ю щ и и с и тем, что упру- ; гие звенья выполнены в виде пружин ; одинаковой жесткости, но с разным . числом витков, при этом с корпусом скреплен конец пружины с меньшим чис лом витков, a с контактньм элементом - конец пружины с большим числом витков. исходное положение щ
/ / /7,Z,/ , 9 у /5 Л w////m .
Ucxoff oe г о ожемие У///////// Фиг. 2 к.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Преобразователь линейных перемещений | 1979 |
|
SU848967A1 |
