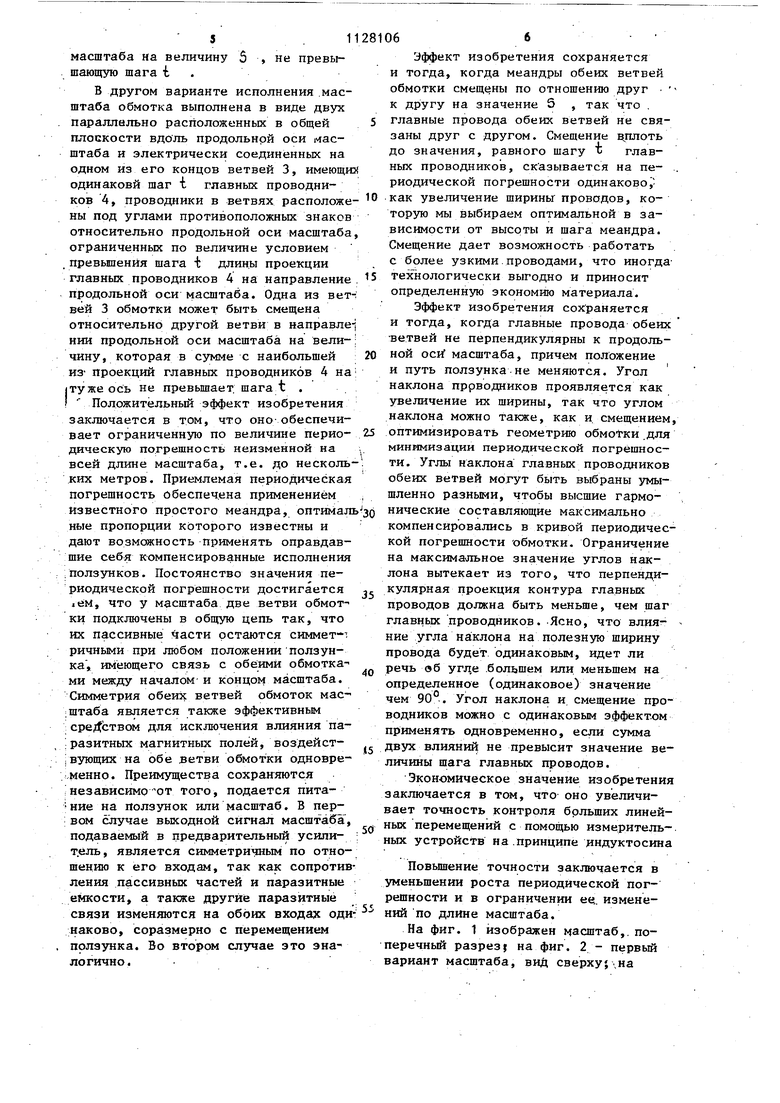
2.Масштаб по п. 1, отличающийся TeMj что одна из ветвей 3 обмотки сме1цеиа относительно другой ветви в направлении продольной оси масштаба на велинну 5 , не превьш1аюшую шага i .
3.Масштаб линейного индуктивного измерительного преобразователя, содер жащий лентообразный Носитель и изолированно уложенную на нем плоскую меац дрообразнзто обмотку, отличающийся тем, что обмотка выполнена в виде двух параллельно расположенных в общкА плоскости вдоль продольной ОСИ масштаба и электрически сое дине ньрс на одном из его концов ветвей 3, имеющих одинаковый шагi
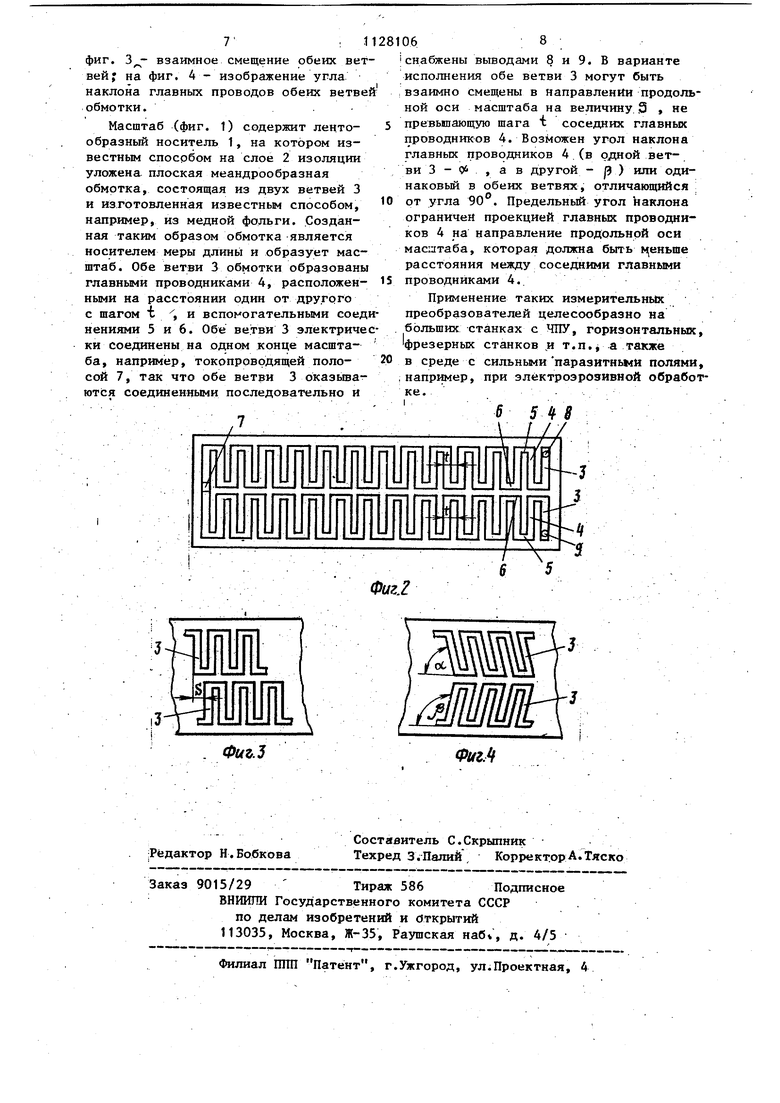
главных проводников 4, проводники д ветвях расположены под углами проти воположных знаков относительно продольной оси масштаба, ограниченных по величине условием превышения шага i длины проекции главных проводников 4 на направление продольной оси масштаба.
t.
4. Масштаб по п. 3, отличающийся тем, что одна из ветвей 3 обмотки смещена относительно другойветви в направлении продольной оси масштаба на величину, которая в сумме с наибольшей из проекций главных проводников 4 на ту же ось не превышает шага t -.
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик перемещений | 1979 |
|
SU848985A1 |
| Преобразователь перемещений | 1979 |
|
SU800610A1 |
| Линейный индуктосин | 1975 |
|
SU581483A1 |
| Бесконтактный индуктосин | 1977 |
|
SU658672A1 |
| Индуктосин | 1983 |
|
SU1136266A1 |
| Фазовый датчик линейных перемещений | 2017 |
|
RU2658131C1 |
| Преобразователь перемещений | 1978 |
|
SU763670A1 |
| Преобразователь перемещений | 1978 |
|
SU1137293A1 |
| Датчик перемещений - индуктокор | 1976 |
|
SU817739A1 |
| НАВИГАЦИОННАЯ СИСТЕМА, ЭЛЕКТРОННО-МЕХАНИЧЕСКАЯ КАРТА И АВТОПИЛОТ | 2006 |
|
RU2313105C1 |
1. МАСШТАБ ЛИНЕЙНОГО ИНДУКТИВНОГО, ИЗМЕРИТЕЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ,, содержащий лентообразный носитель и изолированно уложенную на нем плоскую меандрообразную обмотку, главные, проводники которой перпендикулярны продольной оси масштаба, отличающийся тем, чтЬ обмотка выполнена в виде двух параллельно расположенных в общей плоскоети вдоль продольной оси масштаба и электрически соединенных на однрм из его концов ветвей 3, имеющих одинаковый шаг t главных проводников4. 8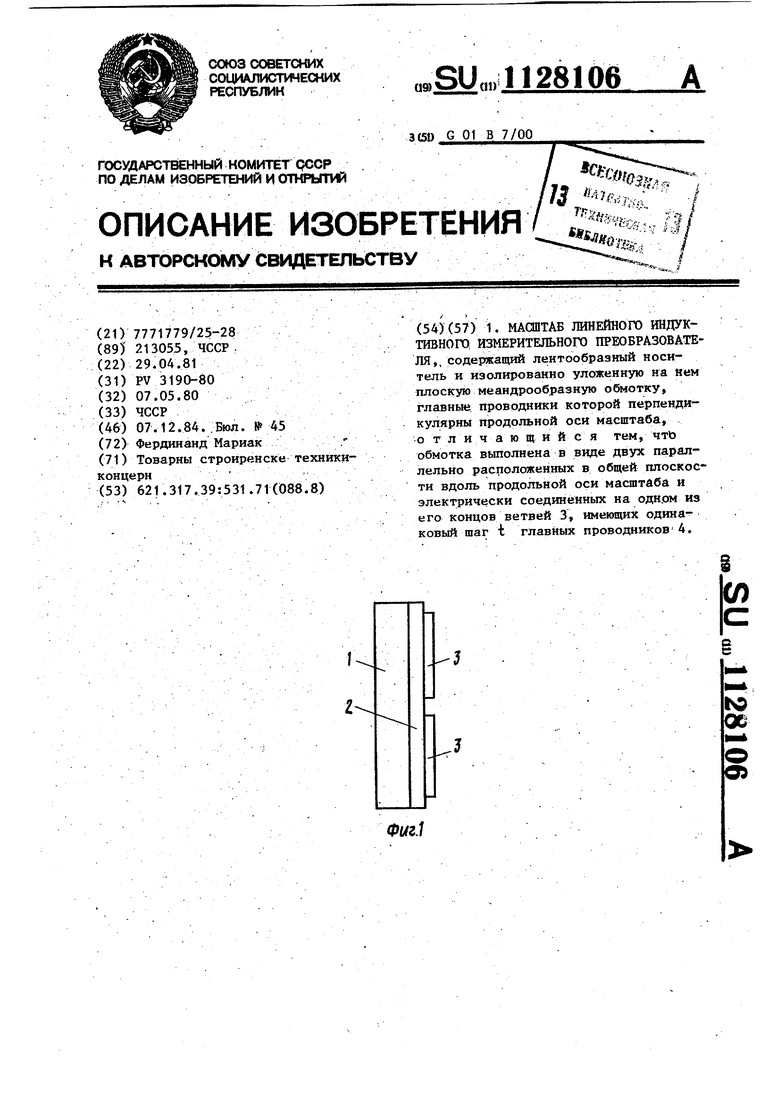
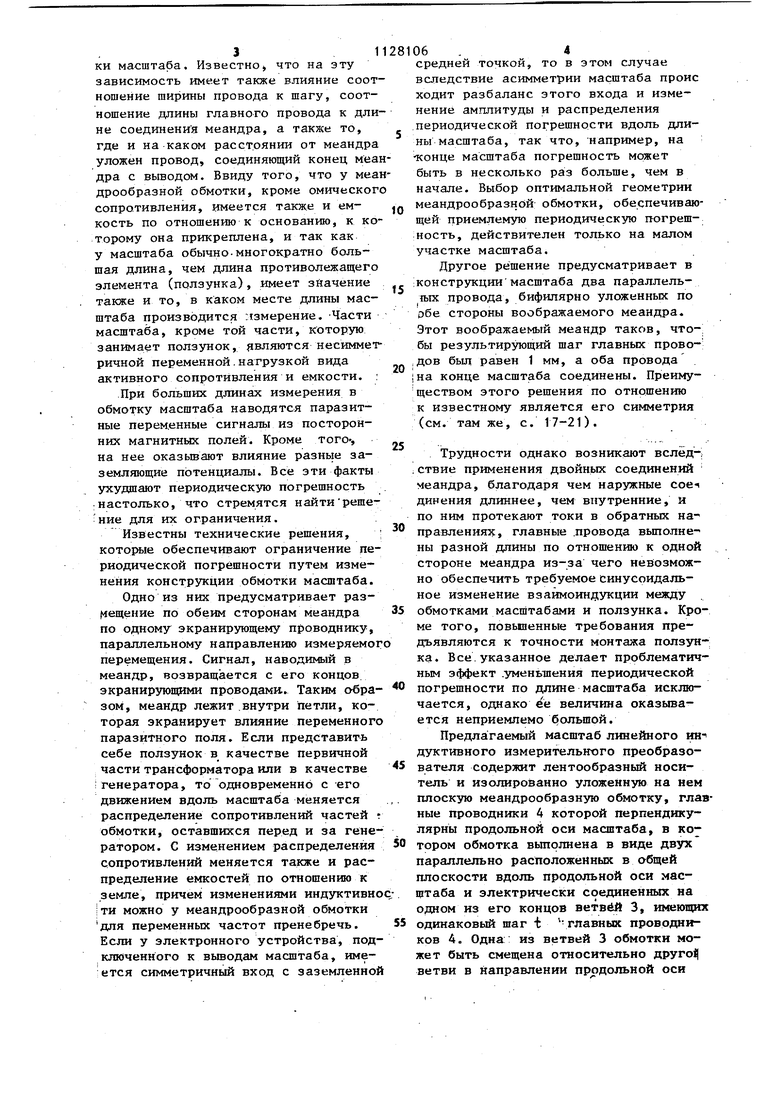
Изобретение относится к измерительной технике и может быть использовано в измерительных преобразователях перемещения индукционного типа Известны индзгктивные измерительные преобразователи перемещения, (ин дуктосин), состоящие из двух элементов, один из которых предст-авляет меру по длине и назьгоается масштабом, а второй, значительно короче, н зывается ползуном. Сигнал переменног тока формируется за счет взаимоиндук ции между плоскими .меан 1рообразными обмотками, которые у обоих элементов индуктосина расположены в плоскости друг против друга. У масштаба одна токовая цепь, а у ползунка - их две. Питание йолучает или ползунок, или масштаб. Преобразователь работает как трансформатор, выходной сигнал которого изменяется по амплитуде и фазе или только по фазе, в соответствии со способом питания преобразователя, в зависимости от взаимного перемещения его элементов по отношению друг к другу. Дпя измерения используется перемещение в плоскрсти меандрообразных обмоток прео.бразова. теля при соблюдении постоянства промежутка между масштабом и ползунком. : Известна конструкция масштаба, плоская которого состоит из Ютавных проводов, перпендикулярных к направлению измеряемого перемещения, и расположенных с точным шагом, например, 1 мм, и вспомогательных соединений, которые образуют с главными проводами меандр. Главный провод и соединения влияют на форму передаваемого сигнала, которьй повторяется с шагом меандра,.соответствующим удвоенному шагу главных проводов (Пути совершенствования измерительных преобразователей типа индуктосин. Экспресс-информация, вып. 3, ЦНИИТЭИприборостороения, М., 1975, с. 3). Чтобы можно было измерять любую выбранную часть шага меандра, необходимо сигнал соответствующего шага интерполировать. При интерполяции возникает ошибка, главной причиной которой является то, что интерполированный сигнал не находится в простой зависимости с взаимным перемещением обоих элементов преобразователя. Эта ошибка систематическая и называется периодической погрешностью в отличие от суммарной погрешности, выражающей неточность цедой длины масштаба. Зависимость выходного сигнала от взиамного перемещения обоих элементов преобразователя определяется способом питания и оценки сигнала. Дпя любого способа питания и оценки обусловлена конструкцией меандрообразной обмотки масштаба. Известно что на эту зависимость имеет также влияние соот ношение ширины провода к шагу, соотношение длины главного провода к дли не соединений меандра, а таклсе то, где и на каком расстоянии от меандра уложен провод, соединяющий конец меа дра с выводом. Ввиду того, что у меа дрообразной обмотки, кроме омическог сопротивления, имеется также и емкость по отношению к основанию, к ко торому она прикреплена, и так как у масштаба обычно-многократно большая длина, чем длина противолежащего элемента (ползунка), имеет зйачение также и то, в каком месте длины масштаба производится лзмерение. Части масштаба, кроме той части, которую занимает ползунок, 1вляются несиммет ричной переменной.нагрузкой вида активного сопротивления и емкости. .При большие длинах измерения в обмотку масштаба наводятся паразитные перем.енные сигналы из посторонних магнитных полей. Кроме того-, на нее оказывают влияние разные заземляющие потенциалы. Все эти факты ухудшают периодическую погрешность настолько, что стремятся найтиреше ние для их ограничения. Известны технические решения, KOToiftie обеспечивают ограничение пе риодической погрешности путем изменения конструкции обмотки масштаба. Одно из них предусматривает раз1 ещение по обеим сторонам меандра по одному экранирующему проводнику, параллельному направлению измеряемо перемещения. Сигнал, наводимый в меандр, возвращается с его концов экранирующими проводами.. Таким обра зом, меандр лежит внутри петли, которая экранирует влияние переменног паразитного поля. Если представить себе ползунок в качестве первичной части трансформатора или в качестве iгенератора, то одновременно с его движением вдоль масштаба меняется распределение сопротивлений частей обмотки, оставшихся перед и за гене ратором. С изменением распределения сопротивлений меняется также и распределение емкостей по отношению к земле, причем изменениями индуктивно Iти можно у меандрообразной обмотки для переменных частот пренебречь. Если у электронного устройства, подключенного к выводам масштаба, имеется симметричный вход с заземленной 06 .4 средней точкой, то в этом случае вследствие асимметрии масштаба проис ходит разбаланс этого входа и изменение амплитуды и распределения периодической погрешности вдоль длины масштаба, так что, Например, на тсонце масштаба погрешность мсжет быть в несколько раз больше, чем в начале. Выбор оптимальной геометрии меандрообразной: обмотки, обеспечивающей приемлемую периодическую погрешность, действителен только на малом участке масштаба. Другое решение предусматривает в конструкциимасштаба два параллель1ЫХ провода, бифилярНо уложенных по обе стороны воображаемого меандра. Этот воображаемый меандр таков, чтобы результирующий шаг главных прово-.дов был равен 1 мм, а оба провода 1на конце масштаба соединены. Преимуществом этого решения по отношению к известному является его симметрия (см. там же, с. 17-21). Трудности однако возникают вслед-; ствие применения двойных соединений меандра, благодаря чем наружные coei динения длиннее, чем внутренние, и по ним протекают токи в обратных направлениях, главные .провода выполне-ны разной длины по отношению к одной стороне меандра из-за чего невозможно обеспечить требуемое синусоидальное изменение взаимоиндукции между обмотками масщтабами и ползунка. Кроме того, повыпенные требования предъявляются к точности монтажа ползун-; ка. Все.указанное делает проблематичным эффект .уменьшения периодической погрешности по длине масштаба исключается, однако ее величина оказьшается неприемлемо большой. Предлагаемый масштаб линейного индуктивного измерительного преобразователя содержит лентообразный носитель и изолированно уложенную на нем плоскую меандрообразную обмотку, главные проводники 4 которой перпендикулярны продольной оси масштаба, в котором обмотка выполнена в виде двух параллельно расположенных в общей плоскости вдоль продольной оси масштаба и электрически соединенных на одном из его концов ветвей 3, имеющих одинаковый шаг t главных проводников 4. Одна: из ветвей 3 обмотки может быть смещена относительно друго ветви в направлении продохшной оси масштаба на величину 5 , не превышающую шага i . В другом варианте исполнения.масштаба обмотка выполнена в виде двух параллельно расположенных в общей плоскости вдоль продольной оси масштаба и электрически соединенных на одном из его концов ветвей 3, имеющш одинаковй шаг i главных проводников 4, проводники в ветвях расположе ны под углами противоположных знаков относительно продольной оси масштаба ограниченных по величине условием .превьшенйя шага -fc длины проекции главных проводников 4 на направление продольной оси масштаба. Одна из вет вей 3 обмотки может быть смещена относительно другой ветви в направле НИИ продольной оси масштаба на величину, которая в сумме с наибольшей из- проекций главных проводников 4 на I ту же ос:ь не превышает, шага t . Положительньй эффект изобретения заключается в том, что оно- обеспечивает ограниченную по величине периодическую погрешность неизменной на всей длине масштаба, т.е. до несколь ких метров. Приемлемая периодическая погрешность обеспечена применением известного простого меандра, оптимал ные пропорции которого известны и дают возможность применять оправдавшие себя компенсированные исполнения ;полззшков. Постоянство значения периодической погрешности достигается leM, что у масштаба две ветви обмотки подключены в общую цепь так, что их пассивные асти остаются симмет-т ричными при любом положенииползунка, имеющего связь с обеими обмотками между началом- и концом масштаба. Симметрия обеих ветвей обмоток масштаба является также эффективньм средством для исключения влияния паразитных магнитных полей, воздейст:вующих на обе ветви обмотки одновременно. Преимущества сохраняются независимо ОТ того, подается пита иие на ползунок или масштаб. В первом случае выходной сигнал масштаба, подаваемый в предварительный усипит.ель, является симметричньш по отношению к его входам, так как сопротив ления пассивных частей и паразитные емкости, а также другие паразитные связи изменяются на обоих входаэс оди наково, соразмерно с перемещением ползунка. Во втором случае это эналогично. Эффект изобретения сохраняется и тогда, когда меандры обеих ветвей обмотки смещены по отношению друг к другу на значение 5 , так что . главные провода обеих ветвей не связаны друг с другом. Смещение вплоть до значения, равного шагу t главных проводников, сказывается на пе- . риодической погрешности одинаково, как увеличение ширины проводов, которую мы выбираем оптимальной в зависимости от высоты и шага меандра. Смещение дает возможность работать с более узкими.проводами, что иногдатехнологически выгодно и приносит определенную экономию материала. Эффект изобретения сохраняется и тогда, когда главные провода обеих ветвей не перпендикулярны к продольной оси масштаба, причем положение и путь ползунка не меняются. Угол наклона пррводников проявляется как увеличение их ширины, так что углом наклона можно также, как и. смещением, оптимизировать геометрию обмоТки .для минршизации периодической погрешности. Углы наклона главных проводников обеих ветвей мо.гут быть выбраны умышленно разными, чтобы высшие гармонические составляющие максимально компенсировались в кривой периодической погрешности обмотки. Ограничение на максимальное значение углов наклона вытекает из того, что перпендикулярная проекция контура главных проводов должна быть меньше, чем шаг главных проводников. Ясно, что влияние угла на клона на полезную ширину провода будет, одинаковым, идет ли речь в б угл,е .большем или меньшем на определенное (одинаковое) значение чем 90°. Угол наклона и смещение проводников можно с одинаковым эффектом применять одновременно, если сумма двух влияни не превысит значение величины шага главных проводов. Экономическое значение изобретения заключается в том, что оно увеличивает точность контроля больших линейных перемещений с помощью измерительных устройств на.принципе индуктосина Повышение точности заключается в уменьшении роста периодической погрешности и в ограничении ее. изменений по длине масштаба. На фиг. 1 изображен масштаб,, поперечный разрезI на фиг. 2 - первый вариант масштаба, вид сверху},на фиг. взаимное смещение обеих вет вей; на фиг. 4 - изображение угла наклона главных проводов обеих ветве обмотки. Масштаб (фиг. 1) содержит лентообразный носитель 1, на котором известным способом на слое 2 изоляции уложена плоская меандрообразная обмотка, состоящая из двух ветвей 3 и из.гртовленная известным способом, например, из медной фольги. Созданная таким образом обмотка является носителем меры длины и образует масштаб. Обе ветви 3 обмотки образованы главными проводниками 4, расположенными на расстоянии один от другого с щагом t , и вспомогательными соед нениями 5 и 6. Обе ветви 3 электриче ки соединены на одном конце масштаба, например, токопроврдящей полосой 7, так что обе ветви 3 оказьшаются соединенными последовательно и 1 68 . снабжены выводами 8 и 9. В варианте исполнения обе ветви 3 могут быть взаимно смещены в направлении продольной оси масштаба на величину .3 , не превьшающую шага t соседних главных проводников 4. Возможен угол наклона главньк проводников 4 (в одной ветви 3 - О , а в другой - р ) или одинаковый в обеих ветвях, отличающийся от угла 90. Предельный угол наклона ограничен проекцией главных проводников 4 на направление продольной оси мас:лтаба, которая должна быть ь еньше расстояния между соседними главными проводниками 4. Применение таких измерительных преобразователей целесообразно на больших станках с ЧПУ, горизонтальных, фрезерных станков и T.n.j а также в среде с сильнымипаразитньми полями, например, при элёктроэрозивной обработке. « 5 te
