Изобретение относится к устройствам навигации и картографии, возможно применение для целеуказания и привода станков и устройств автоматики.
В настоящее время для навигации используются три типа принципов: инерционные (гироскопы и счетчики движения в среде), спутниковые и наземные с помощью стационарных средств. Последние разделяются на следующие группы: угломерные, дальномерные, угломерно-дальномерные и разностно-дальномерные (гиперболические).
Последняя система положена в основу предлагаемого изобретения, суть которого заключается в следующем:
Вся поверхность земли (сфероид) покрывается сетью радиопередатчиков в виде равносторонних треугольников. Добавляется еще одна такая сеть таким образом, чтобы вершины (где находятся рации) треугольников оказались в центре предыдущей сети. При этом получится, что в каждой навигационной группе из трех раций, в виде треугольника, в центре этого треугольника будет рация другой сети. Обе сети идентичны и работают одинаковым образом. Центральная радиостанция посылает синхросигнал для навигационного треугольника другой сети, который при таком положении будет принят станциями одновременно и каждая из них на своей частоте ретранслирует его в виде какого-нибудь сигнала. В любой точке внутри этого треугольника, а также около него приход этих сигналов сформирует два импульса различной последовательности вследствие разности расстояний, проходимых сигналом в пространстве, причем последовательность приема сигналов и величина задержки между ними есть однозначная функция положения места приема с высокой степенью точности. Точность определятся длиной волны и разностью прихода трех импульсов, что гарантирует абсолютную (а не относительную) точность на расстоянии до 3-5 навигационных треугольников от центра применяемой тройки раций. Для покрытия всей территории бывшего СССР потребуется до 1000 таких радиоточек с длиной треугольника около 250-350 км, каждый из которых может работать несинхронно с соседними навигационными треугольниками. Возможно использовать любые три радиостанции при любом их расположении, поместив на равном расстоянии от них синхронизирующую радиостанцию (геометрический центр навигационного треугольника), или устройство синхропуска с задержками для всех трех радиостанций. Например, ведущая для двух ведомых радиостанций выдает синхросигнал, по приеме которого ведомые (и ведущая тоже) с определенными задержками выдают координатные для объекта сигналы, приходящие в геометрический центр одновременно.
В обычном варианте на самолете присутствует сложная радиотехническая лаборатория (которая из-за своей сложности даже не рассматривается в курсах по самолетовождению) и набор спецкарт. Точность определения координат невысока, но вполне достаточна для авиа- и судоходства, неоперативна и сложна, требует высокого уровня подготовки персонала. Предлагаемое же оборудование доступно для использования любому человеку.
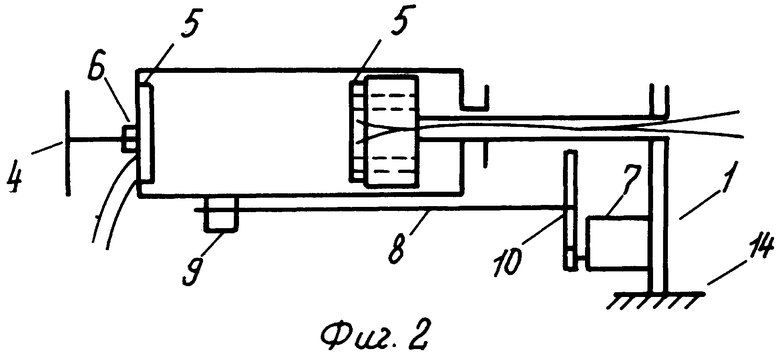
Суть установки (фиг.1) заключается в том, что создается система отражения на карте задержек импульсов на основе жидкостно-акустической (воздушно-) системы переменной длины. Для этого под стеклом с картой в вершинах (местах расположения на карте раций сети) равностороннего треугольника жестко располагают три оси 1, на которых в разных уровнях крепят поршни 2 в цилиндрах 3 (координатные акустоцилиндры), причем цилиндры 3 соединены своими концами на одну ось 4, а поршни 2 - на три жестко фиксированные оси 1, каждый на свою в отдельности. На противоположных концах внутри цилиндров (фиг.2) на цилиндре и на поршне расположены пьезодатчики 5 для возбуждения и приема акустических сигналов, при ходе поршня изменяется акустическая длина канала и соответственно время задержки. Цилиндры снабжены микрометрическими винтами 6 для точной регулировки и подстройки. Длина канала изменяется, например электродвигателем 7 постоянного тока, на который подается сигнал рассогласования при сравнении разности импульсов прихода радиосигналов с разностью длин импульсов распространения акустического сигнала в акустоцилиндрах. На центральной оси 4, которая расположена под картой, находится точка подсветки 11 карты 12, указывающая место положения, и более слабая лампа общей подсветки. Лампа может быть одна, а отражатель сделан таким образом, что одной лампой обеспечивается и общая подсветка карты и точечное указание местоположения узким сильным (возможно через светофильтр) лучом света. Например, источник света с отражателем на всю карту находятся внизу, а сверху всю систему закрывает другой отражатель с точечным отверстием, которое расположено у самого стекла, что обеспечивает параллельный луч подсвета местоположения и отсутствие рассеяния вследствие углов отражения. Лампа выбирается по возможности с более сосредоточенной спиралью, например, вертикально расположенной. В качестве точечного источника света может быть применен полупроводниковый лазер. Карты выпускаются в специальных проекциях (с коррекцией сферических искажений - сужение пространства к краям карты пропорционально прохождению сигнала) и спецточками для точного крепления на стекло автонавигатора. Возможно применение кальки для сохранения пути следования объекта с метками времени и пр. Для управления изменения длины канала звука можно использовать резьбу на железном стержне 8, размещенном в резиновую гайку 9 значительной длины. Стержень с резьбой приводится во вращение электромотором через зубчатую передачу 10. Длина хода акустического канала должна быть достаточной для перемещения точки подсвета внутри треугольника и за его пределы на некоторое расстояние, в крайнем случае, можно перейти к воздушной акустической связи. На одном стержне 8 с резьбой можно расположить несколько акустических каналов с разными жидкостями для разных систем и масштабов (или несколько каналов, соединенных последовательно, для сокращения геометрических размеров). Электродвигатели 7 крепятся только на двух стержнях, третий имеет свободное движение, которое ограничено первыми двумя в точке подсвета. Для сравнения длины импульсов применяют вспомогательные акустоцилиндры в виде оперативного запоминающего устройства (ОЗУ). При приходе импульсов они запускают в двух рядом находящихся каналах ОЗУ (спаренных с идентичными - всего 2·2=4 акустоцилиндра) импульс в жидкости, каналы управляются электромоторами таким же образом и являются элементом оперативной памяти величины задержки сигналов для управления троицей акустоканалов под картой. Первый канал используется для подгонки электромотором под радиосигнал, а второй, идентичный ему, используется для сравнения акустической длины в координатном акустоцилиндре. Синхронно подается сигнал на два этих канала и на три под картой. Сравнивается фаза сигналов на выходе и подается управляющий сигнал на электромоторы, изменением длины акустического канала координатного акустоцилиндра меняют точку подсвета местоположения на карте. При этом каналы линии задержки следят за разницей прихода сигналов с радиостанций навигационного треугольника и на спаренных с ними каналами отражают акустическую длину. Для полета за пределами навигационного треугольника можно применить ОЗУ повышенной точности с жидкостью с высокой скоростью звука, так как при удалении от навигационного треугольника величины задержек импульсов стремятся к нулю. Для исключения логики можно добавить к ним третий механический канал (тоже из двух идентичных каналов), при этом три канала радиоприемника (с тремя парными каналами памяти) совмещают с тремя каналами аудио и аудиоканалы делают переключаемыми для удобства отображения координат за пределами навигационного треугольника, при этом карта поворачивается на 120 градусов. Все устройство можно снабдить необходимым количеством репитеров с подобным приводом и автоматической ретрансляцией величины задержек импульсов на пост ВНОС или систему целеуказания и координат других объектов. Возможно применить устройство регулируемого навигационного треугольника, то есть располагаемые на "Виллисе" подвижные радиостанции образуют произвольный треугольник, а по степени задержек регулируется место жесткого крепления углов навигационного треугольника на каждом подвижном объекте. Жесткое крепление углов навигационного треугольника может быть на подвижной пластине 13, пластина может вращаться вокруг оси на рабочей платформе 14 (как переключатель огня у автомата Калашникова) со стопором для разных систем сетей навигации (разного масштаба или районов страны). Можно сделать так, что переключаются две оси с электроприводом (поближе к нерегулируемой оси) для полета за пределами навигационного треугольника, в этом случае экономно расходуется окружающее пространство и удается исключить выступающие части прибора. Если на одном акустоцилиндре применить две синхронизированные резьбы: одну наружную для центральной оси точки подсвета, а вторую внутри акустического цилиндра на тонком вращающемся стержне внутри подвижного поршня с пьезодатчиком, с совмещением положения поршня и точки подсвета, то выступающие части можно исключить вовсе. Возле оси вращения возле каждого угла навигационного треугольника есть мертвая зона, которую можно значительно уменьшить рациональным расположением элементов и внести переключатель навигационного треугольника с рабочего на соседний и организовать упор для блокирования попадания центральной оси в эту зону с одновременным гашением подсветки. При пролете, то есть движении центральной оси через эту зону, центральная ось обогнет зону по окружности и, выйдя из нее, включит подсветку. Возможно автоматическое переключение на соседний навигационный треугольник при попадании в мертвую зону с одновременным сигналом и, возможно, автоматическим сдвигом карты на стекле (или вместе с ним). Величину мертвой зоны можно уменьшить боковым параллельным расположением акустоцилиндров. Величина мертвой зоны в принципе определяется усилием электромотора и сохраняемой точностью при продолжительной работе. То есть, дойдя до мертвой зоны, усилия электромотора может не хватить, чтобы провернуть рычаг, а небольшой тряски достаточно, чтобы вывести прибор из строя. Для устранения такой возможности акустоцилиндр снабжают надлежащим противовесом. Так как в мертвой зоне рычаг небольшой, то можно ввести, например подпружиненный преобразователь движения (пружина сжимается и поступательное движение через механизм передачи преобразует во вращательное) по типу торсионной подвески в танке и исключить мертвую зону полностью. По периметру карты для ограничения движения координатного механизма вводят подпружиненный натянутый тросик с реле сигнализации и блокировки электропривода. Скорость работы координатного планшета позволяет разместить их несколько на одном объекте с разновременным подключением к радиоприемному блоку с ручным или автоматическим переключением. Для компенсации протечек вводят бак с расходуемой рабочей жидкостью, а места возможных протечек дополнительно закрывают одноразовыми впитывающими влагу специальными прокладками, например в колпачках. В целом техобслуживание такой гидравлической системы не сложнее, чем у автомобиля.
В подобную систему навигации достаточно просто ввести параллелограммный репитер и автопилот (фиг.3). Для этого вводят два свободно двигающихся акустоцилиндра 15 автопилота, крепящихся одним своим концом к центральной оси 4, а другими концами, через тяги 16 равной длины - к свободно перемещаемой подсвечиваемой отметке 17 цели (места назначения). Отметка цели и концы тяг могут крепиться тормозами 18 между плоскостями - одной прозрачной 12, где карта, и другой рабочей платформой 14, где крепятся и перемещаются оси. Тормоза могут работать от пневматической педали, пневмоцилиндром фиксируя раздвижные подпружиненные тормозные колодки. То есть при нажатии на педаль сжимаются пружины и фиксируют тормозные колодки, а фотографическим тросиком (витой из гибкой проволоки шланг с проводом внутри) тормозные колодки могут быть разблокированы спуском пружин. Акустоцилиндры автопилота снабжены пружинами 19 таким образом, чтобы все время быть в растянутом состоянии, и имеют при этом одинаковую акустическую и механическую длину (регулируется микрометрическими винтами) при собранном всем устройстве, обеспечивая симметричность ромба привода автопилота.
Принцип работы устройства следующий: каждая тяга и сопутствующий ей акустоцилиндр автопилота составляют равные фигуры по оси симметрии, совпадающей с линией (курсом), соединяющей отметки 17 цели и местоположения 4 в настоящее время. Причем отметка 17 цели выведена вперед по отношению к тормозам 18 тяг 16, которые могут свободно перемещаться в межплоскостном пространстве с небольшим люфтом на войлочной прокладке с обеих сторон (обеспечивающей перпендикуляр к плоскостям). Во время полета самолета производится установка отметки 17 цели и фиксируется тормозом 20, после чего тормозом 18 фиксируется положение концов тяг 16 (к которым крепятся акустоцилиндры 15 автопилота). В этот момент акустоцилиндры 15 автопилота определяют равные расстояния. Самолет может двигаться в любом направлении в сторону цели и в момент фиксации тормозов 18 тяг 16 включается автопилот. Целью автопилота является поддержание курса (а также высоты полета и, желательно, интервала скоростей). Интервал скоростей и высота поддерживаются автоматически и взаимосвязано с курсовым направлением. С начала века крылья самолетов имеют небольшой V-образный развал, который обеспечивает возвращающий опрокидывающий момент при крене самолета, так что при зафиксированной по центру ручки управления обеспечивается автоматическая коррекция крена. Если направление полета отлично от заданного, то в акустоцилиндрах 15 будет вырабатываться сигнал ошибки, который будет синхронно одновременно управлять приводом рулей высоты, направления и элеронами. При уменьшении геометрического расстояния пружина 19 акустоцилиндра будет сжиматься, но специальным механизмом место крепления оправки пружины 19 с одного конца при движении поршня расцепит оправку и место зацепления, и пружина 19 будет свободно перемещаться по акустоцилиндру 15 автопилота. Возврат зацепления пружины 19 возможен натяжением и отпусканием специального тросика при взводе автопилота. Тормоз 20 отметки цели своей конструкцией под тупым обратным углом фиксирует тяги для однозначной работы фазоразностного электронного регулирования.
Точность всей системы определяется погрешностью электронных приборов и погрешностью механической части - нелинейностью преобразования, люфтами в системе и т.д. При частоте передатчика 1 МГц погрешность составит примерно 1/4 волны, т.е. 75 м. При большей частоте погрешность будет пропорционально уменьшаться. Обычные радиолампы и пьезоэлементы при любых условиях обеспечивают частоту в десятки МГц. Возможно ввести определение запаздывания на промежуточной частоте в 0,5-2 МГц ввиду достаточной точности получаемой информации. В этом случае частотной модуляцией передается тональный сигнал (или транслируется передача), а амплитудной модуляцией передается сигнал для трех идентичных приемных каналов с гетеродинами на переключаемых кварцах. Для всей сети возможно иметь всего 4 переключаемых группы частот.
Применение в акустоцилиндрах поршней с отверстиями для перелива жидкости и боковых амортизирующих демпферов позволит обеспечить однозначность положения поршня в цилиндре и, соответственно, акустическую длину канала, сравнимую расстоянием на карте. Погрешность регулировки электромотором определяется передаточным числом зубчатой передачи и степенью износа (люфта) передачи типа винт-гайка, которую легко можно сделать и поддерживать долгое время меньше 0,1 мм. Сам прибор отражения информации (без приемной, прочей электронной и механической части) представляет по размерам небольшую коробку (размером с чемодан типа "дипломат") со стеклом на верхней части для подсветки карты. Размер под карту составит примерно размер планшета 25-30 см на 35-40 см с масштабом 5-10 км на 1 см карты. Механический люфт весьма легко довести до 0,2 мм, что меньше игольной точки подсветки местоположения на карте. То есть точность прибора будет превышать практические потребности самолето- и судовождения.
Для устранения запотевания весь прибор изготавливается в виде нескольких блоков: планшет для карты и все остальное. Планшет делается герметизированным, с резиновой грушей внутри корпуса для компенсации изменений давлений внутри и снаружи корпуса.
В случае полетов за пределами навигационного треугольника (например, за линией фронта) длины регулирующих координатных стержней может не хватить на весь размер карты, как впрочем и самой карты. В этом случае оси координатных акустоцилиндров привода точки подсвета делают (оси) подвижными на рукоятках с возможностью подпружиненного их хода в небольших пределах. Рукоятки крепятся на одной неподвижной оси, совпадающей с геометрическим центром отображаемого навигационного треугольника. А сильная (до гарантированного устранения люфта при толчках) пружина на рукоятке прижимает подвижную на рукоятке ось к подвижной в пазах пластине. Под рабочей платформой-основанием находится вторая платформа, обеспечивающая перпендикулярное положение осей на рукоятках (относительно рабочей платформы) и крепление их и вспомогательных механизмов. Для перевода устройства в режим полета за пределами навигационного треугольника оси с регулируемыми координатными акустоцилиндрами переводятся рукоятками (с оттяжкой пружин) поближе к оси нерегулируемого электромотором координатного акустоцилиндра таким образом, чтобы образовать между собой в 3-5 раз кратно меньшую сторону отражаемого ранее навигационного треугольника на карте. Ось нерегулируемого координатного акустоцилиндра переводится в пазе (возможно криволинейном, для огибания прочих механизмов) вперед до подпружиненного совпадения с подвижной пластиной и образования отображения того же навигационного треугольника, только в уменьшенном масштабе. В отличие от рукояток регулируемых координатных акустоцилиндров рукоятка нерегулируемого координатного акустоцилиндра состоит из двух трубок, подвижных в отверстиях держателя, жестко закрепленного и вращающегося в геометрическом центре снизу рабочей платформы в разных плоскостях с рукоятками регулируемых координатных акустоцилиндров. Ось на рукоятке из двух трубок подпружиненно фиксируется механизмами типа тумблер. Оттянутая до щелчка тумблера рукоятка попадает в криволинейный паз и движением вперед к центру планшета подводится к меньшему термокомпенсирующему цилиндру до сопротивления тумблера. Небольшим усилием рукоятка поворачивается в сторону и тумблерный механизм фиксирует ось координатного акустоцилиндра на конце термокомпенсирующего цилиндра. Затем подводятся две другие оси координатора и перевод в режим полета за пределами навигационного треугольника закончен (3 манипуляции рукоятками - 3 секунды + смена карты). Оси регулируемых координатных акустоцилиндров также подпружиненно прижимаются к подвижным пластинам, регулируемым термокомпенсаторными акустоцилиндрами второго комплекта, но в меньшем, пропорционально изменению масштаба, размере. Координатные акустоцилиндры имеют внутри либо кратно увеличению масштаба увеличение комплектов пьезодатчиков, либо к одному комплекту пьезодатчиков триггерную схему прогонки звука несколько раз через один и тот же акустоканал. Что равносильно увеличению акустической длины канала и соответственно изменению масштаба карты. Карта применяется со вторым типом искажений - для полета за пределами навигационного треугольника. Комплекты карт могут быть запаяны в целлулоид и иметь отверстия для быстрой установки на штыри, в том числе и как слайды. Карта сверху может прижиматься сеткой. Выдвинутая вперед ось нерегулируемого координатного акустоцилиндра позволяет отражать координаты в угле 240 градусов по горизонту от центра используемого навигационного треугольника на 3-5 длин его сторон. Увеличение акустического канала в координатных акустоцилиндрах (без перевода координатных акустоцилиндров в полет за пределами навигационного треугольника) позволяет осуществлять навигацию по увеличенному, например в 3-5 раз, навигационному треугольнику (со стороной, кратной составным треугольникам) той же сети.
На коробку управления можно вывести информацию о режимах работы и цветокодовое отражение управляющего навигационного треугольника, ту же маркировку можно ввести на картах.
Для устранения погрешностей жидкостно-воздушного способа измерений, связанного с изменением масштабов, рекомендуется ввести способ акустических измерений в твердом теле при помощи подвижного ползунка (с пьезоэлементом-звукоснимателем) на стержне. Ползунок перемещается червячно-винтовой передачей, спаренной со стержнем в одной плоскости. На ползунке также размещается ось отметки места. В случае применения раздельных приводов для оси отметки места и для ползунка, можно применить разномасштабное отражение для карты и акустического сигнала, что упрощает устройство звукоснимающей дорожки на измерительном акустическом стержне ввиду того, что стержень умещается в пределах карты на всю свою длину. В этом случае ось отметки места размещается рядом на другом ползунке с резьбой на наружной трубке с резьбой. Внутрь этой наружной трубки тоже вставлена трубка (внутренняя) с резьбой. Шаг резьбы на внутренней и наружной трубках и на ползунке одинаков. Привод ползунков, акустического и отметки места, осуществляется вращением вставленных в них трубок с резьбой, например, посредством редуктора от одного мотора, с целью обеспечения нужного масштаба перемещения. На конце наружной трубки ползунка отметки места размещен тумблерный механизм блокировки вращения вала. То есть вращающий момент подается на внутренний вал, который сблокирован с наружным, поэтому при вращении вала ползунок отметки места будет перемещаться по наружному валу до тех пор, пока не включит механизм блокировки. Механизм блокировки при достижении ползунком крайнего положения моментально тумблером расцепляет сблокированные валы и (возможно) одновременно блокирует вращение наружного вала. Вращавшиеся раньше одновременно сцепленные валы расцепляются и своим вращением внутренний вал начинает свинчивать с себя наружный вал с блокированным на нем ползунком с той же подачей. Таким образом достигается перемещение ползунка отметки места в пределах всей карты в соотношениях сторон карты от 1:2 до 2:1. На концах валов могут находиться предохранители, размыкающие электроцепь при достижении ползунком крайних положений. Внутри валов может быть стержень гвоздеобразной формы на пружинах с обоих концов для фиксации его в центре раздвинутых телескопических валов. Этим стержнем при подборе размеров достигается минимальный перекос (повышенная точность) выдвинутых (раскрученных) валов. Кроме того, дополнительная точность обеспечивается треугольной схемой привода, поэтому перекос валов слабо отражается на точности, а имеет значение расстояние между осями, определяемое шагом резьбы и количеством поворота вала. С учетом поддержания температуры в пределах ±10°С и наличествующих люфтах вполне достижима точность 0,1 мм, что меньше штурманской ошибки "величина отметки на бумаге остро отточенного карандаша". Точность поддержания масштаба определяется точностью редукторной передачи к однотипным валам отметки места и акустического стержня (определяется количеством зубьев в колесах редукторов и люфтов между ними). Существующие простые способы нейтрализации люфтов (подтяжка и т.д.) и регулировка микрометрическими винтами позволяет и дальше снизить погрешность и основной проблемой становится высвечивание на карте пятна такого размера.
Для введения в электропланшет функции целеуказания (местоуказания) возможно предусмотреть ползунки в виде двух подпружиненных половинок. Тогда рычагом, прикрепленным к отметке цели, можно перемещать ось отметки цели и транслировать разность прихода акустических сигналов.
Возможно применение других способов для отражения разности сигналов навигационных треугольников, например, ползунок переменного резистора в мультивибраторе, навитого на непроводящий стержень. Возможно применить на колесах редуктора электромотора трехступенчатый (и более) резистор из отдельных групп резисторов с кратностью 1:1, 1:10, 1:100 и т.д. на одной оси с увеличением передаточного числа в данной кратности на каждой группе резисторов (например, при помощи зубчатой передачи) пропорционально времени прохождения сигнала.
Акустоцилиндр на нерегулируемой электромотором оси также можно заменить переменным резистором с приводом его на резьбе при работе датчика на оси местоположения рации на карте. В этом случае движение оси отметки места вызовет в датчике сигнал, по которому электромотором на резьбе устранится разность расстояний. Чувствительность датчика можно сделать сколь угодно малой.
Также можно разместить на осях на электромоторах диски с отверстиями и ввести электронные счетчики оборотов моторов с применениям оптоэлектронных датчиков. Число импульсов при оборотах дисков будет означать расстояние, на которое сместится по резьбе отметка местоположения на карте. Для сохранения данных при отключении питания можно ввести микросхемы памяти. Трубки ОЗУ также можно заменить микросхемами.
Если в пределах навигационного треугольника появится какой-нибудь радиомаяк, ретрансляцией его сигналов на центральный синхронизирующий пункт по разности прохождения сигналов можно определить место его положения. Также при работе любой импульсной, частотной и/или амплитудной модуляцией можно определить место любой радиостанции, определив погрешность прихода сигналов по пороговому детектору.
Учитывая начальную погрешность при включении автопилота рекомендуется ввести импульсный детектор с уменьшающимся во времени порогом к различению сигналов из обоих каналов (или что-то подобное) для обеспечения плавного вхождения в режим автопилотирования при начальном разбалансе каналов автопилота.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАДИОЛОКАЦИИ С ФАР | 2005 |
|
RU2349928C2 |
| МАГНЕТРОН С РЕГУЛИРУЕМОЙ МОЩНОСТЬЮ | 2007 |
|
RU2357318C1 |
| Комплекс бортового оборудования вертолетов и самолетов авиации общего назначения | 2016 |
|
RU2640076C2 |
| СПОСОБ ИНДИКАЦИИ ПОЛОЖЕНИЯ ОБЪЕКТОВ НАБЛЮДЕНИЯ | 2006 |
|
RU2333538C2 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2015 |
|
RU2584210C1 |
| СПОСОБ ПОРАЖЕНИЯ ЛЕТЯЩЕГО ПЕРЕМЕННЫМ КУРСОМ И ВЫСОТОЙ ОБЪЕКТА | 2020 |
|
RU2741133C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ РАЗЛИЧНЫХ КЛАССОВ (ВАРИАНТЫ) | 1999 |
|
RU2182313C2 |
| СПОСОБ ПОСАДКИ ВЕРТОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2516244C2 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2834270C1 |
| НАВИГАЦИОННОЕ КОММУНИКАЦИОННОЕ МОБИЛЬНОЕ УСТРОЙСТВО МАНЕВРОВОГО ЛОКОМОТИВА | 2012 |
|
RU2503566C1 |

Изобретение относится к устройствам навигации и картографии. Навигационная система, при которой применяются передающие радиостанции в углах равностороннего треугольника и электронно-механическая карта, в которой под стеклом с картой в местах расположения радиостанций находятся три оси с расположенными на них (вращающимися на этих осях) стержнями с резьбой. Эти стержни соединяются на оси отметчика местоположения на карте и два стержня приводятся во вращение электромоторами от устройства сравнения разностей импульсов прихода радиосигналов от радиостанций и разности импульсов распространения по стержням акустических сигналов. Электронно-механическая карта дополняется автопилотом, состоящим из отметчика места цели с тягами равной длины с подтормаживаемыми концами, к которым крепятся вставляемые друг в друга трубки, растягиваемые пружинами, и по которым распространяется акустический сигнал по линии изменяемой длины. Эти трубки соединяются на отметчике местоположения в электронно-механической карте, который перемещается в соответствии с положением объекта на карте, а устройство сравнения акустической длины подторможенных трубок выдает сигнал на привод рулей при разности акустических длин трубок. 2 н.п. ф-лы, 3 ил.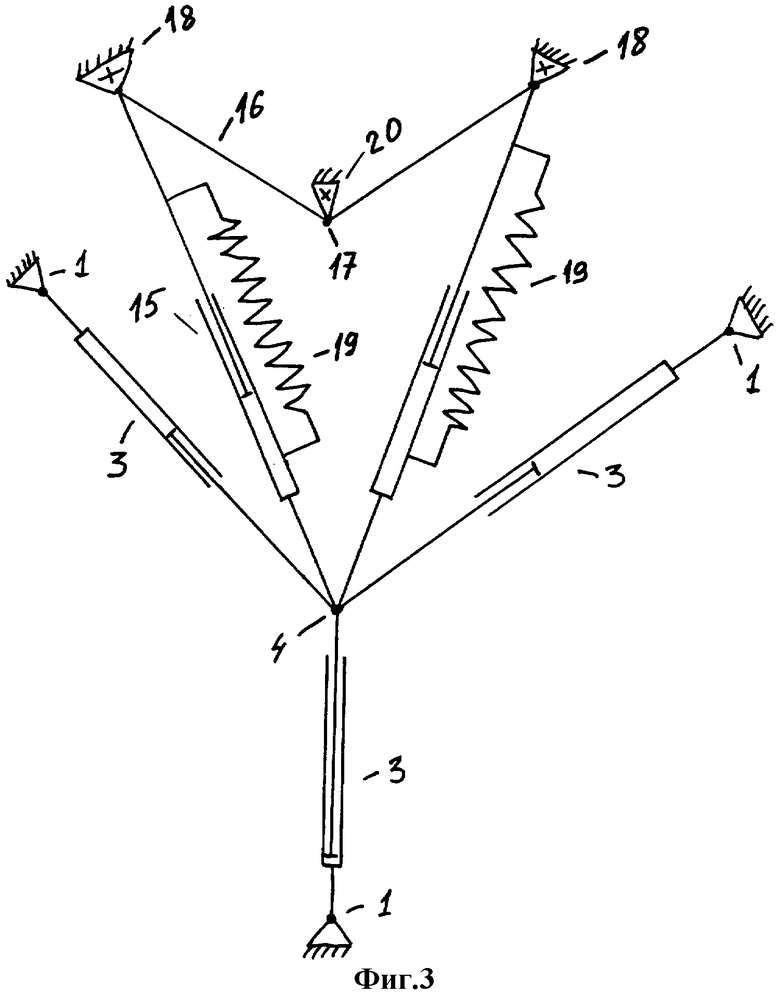
| СПОСОБ ОДНОЗНАЧНОГО ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОСИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2185636C1 |
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 1989 |
|
RU2030755C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2003 |
|
RU2258239C2 |
| EP 0339242 A1, 02.11.1989. | |||

