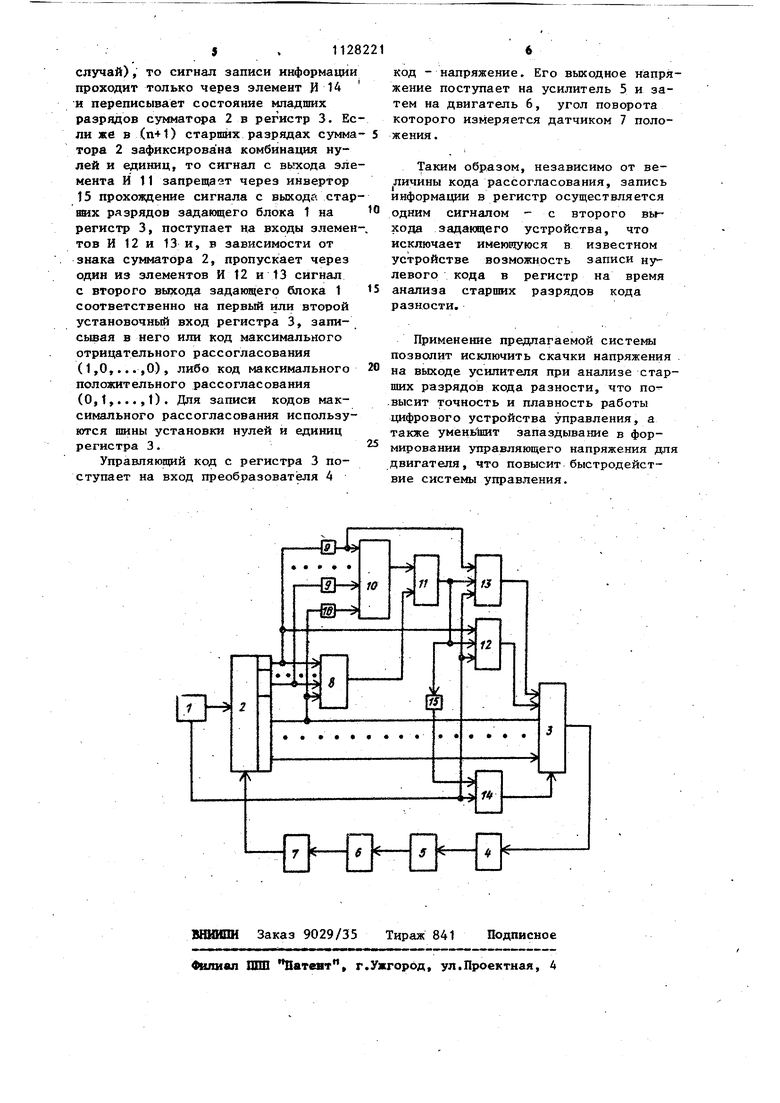
: Изобретение относится к автоматическому управлению и может быть использовано в системах программного (Управления телескопами, станками, антеннами слежения за космическими ; объектами. Известна цифровая система автоматического регулирования, состоящая из программного задающего устройства цифрового вычислите|1ьного устройства выходного регистра хранения,управляющего кода, соединенного с преобразователем код - напряжение, усилителя, двигателя и датчика обратной . связи, подключенного к второму входу цифрового вычислительного устройства. В данной системе в цифровом вычис лительном устройстве вычисляется код разности заданного и измеренного положений системы. Управляниций код фор ьшруется по вычисленному коду разнос ти и хранится в регистре, откуда поступает на преобразователь код напряжение Cl 3. Однако из-за ограниченной точност преобразователя код - напряжение управляюцнй код имеет разрядность мень шую, чем максимальное число разрядов кода разности. Свертывание кода {Разности до тревуемой разрядности управляющего кода осуществляется в вычислительном устройстве программным путем. Сложность формирования управляиицего кода является недостатком таких систем. Наиболее близким техническим реше нием к изобретению по технической сущности является цифровая система автоматического управления, которая содержит задакнцие устройства, первый выход которогоч подключен к первому входу сумматора, первая группа выходов сумматора соединена с соотве.тствую в1 входами {регистра, вторая группа выходов суюштора соединена с первым элементом ИЛИ и через инверторы с вторым элементом ИЛИ, выход элементов ИЛИ через первый и второй входы первого элемента И соединены с первыми входами второго и третьего элементов И, выходами подключенными соответственно к первому и второму устанс вочным входам регист ра, управляюарй вход которого соединей с третьим входом первого элемента И, знаковый разряд сумматора nOAкпючен к второму входу второго элемента И и соответствующему входу первого элемента ИЛИ, а через инвертор к соответствующему входу второго элемента ИЛИ и к второму входу третьего элемента И, последовательно с регистром соединены преобразователь код напряжение, усилитель и двигатель, вал которого механически связан с датчиком обратной связи, выход которого подключен к второму входу сумматора. В системе запись кода максимального рассогласования в регистр происходит в два этапа. Первый сигнал, формируемый на третьем выходе задающего устройства, переписывает состояние младших разрядов сумматора в регистр хранения управляющего кодс. Вслед за этим второй сигнал с второго выхода задающего устройства поступает на третий вход первого элемента И, и если в (п+1) старших разрядов сумматора зафиксирована комбинация нулей и единиц, то сигнаш поступает на первые, входы второго и третьего элементов И и, в зависимости от знака сумматора, проходит через одну из них, устанавливая в регистре код максимального рассогласования. В процессе функционирования данной системы возможна ситуация, когда код разности содертшт комбинацию нуле:й и единиц в старших разрядах, а мл:адшие разряды имеют нулевые значения . Тогда по первому сигналу с третьего выхода задающего устройства в регистр записывается нулевой код, а по второму сигналу, с второго выхода, задающего устройства - код, соответствующий максимальному рассогласованию. Так как с выхода регистра код поступает на вход преобразователя код - напряжение, то выходное напряжение преобразователя сначала изменится скачком от предьщущего значения до нуля (по первому сигналу), а затем скачком возрастет до максиМ 1льного значения (по второму сигналу) 23.. . Однако- сформированный импульс нап11Я1кения поступает на вход усилителя, с выхода усилителя - на исполнительный двигатель, вызывая сначала торможение исполнительно го двигателя, а затем разгон до максимальной скорости, вследствие чего возрастает величина рассогласования, снижается точность, плавност : и быстродействие системы. 311 Цель изобретения - повышение точности устройства. Поставленная цель достигается тем что Б цифровое устройство управления содержащее задающий блок, подключенный первым выходом к первому входу сумматора, соединенного вторым входом с выходом датчика положения, выходами старших разрядов и первым зна ковым выходом с соответствующими информационными входами регистра, а выходами мпадших разрядов и вторым знаковым выходом - с входами первых инверторов и с первыми входами первого элемента ИЛИ, подключенного вто рым входом к выходу первого знакового выхода и через второй инвертор к первому входу второго элемента ИЛИ соединенного вторыми входами с выходами вторых ин верторов, а выходом с первым входом первого элемента И, подключенного вторым входом к выходу первого элемента ИЛИ, а выходом - к первому входу второго элемента И и к первому входу третьего элемента И, соединенного вторым входом с сыходом соответствующего второго инвертора, а вькодом - с первым установочным входом регистра, подключенного вторым установочным входом к выходу вто рого элемента И, связанного вторым входом с первым знаковым выходом сум матора, преобразователь код - напряжение, подключенньй входом к выходу регистра, а выходом через усилитель к входу двигателя, вал которого меха нически связан с датчиком положения, введены четвертый элемент И и третий инвертор, подключенный входом к выходу первого элемента И, а выходом - к первому входу четвертого эле мента И, соединенного вторым входом с вторыми выходами задающего блока и с третьими входами второго и треть го элементов И, а выходом - с управляющим входом регистра. Таким образом, у предлагаемой сис темы появляется свойство анализа кода разности на наличие, или отсутствие максимального рассогласования за один шаг. На чертеже дана блок-схема устройства. Устройство содержит задающий блок 1, сумматор 2, регистр 3, преобразователь 4 код - напряжение, усилитель 5, двигатель 6, датчик 7 положения, пррвый элемент ИЛИ 8, первые инверторы S, второй элемент ИЛИ 10, первый, второй, третий и четвертый элементы И 11 - 14, третий инвертор 13 и второй инвертор 16. Устройство работает следующим образом. Задающий блок 1 вырабатьгоает закон управления, который в виде кода Nj поступает на первьй вход сумматора 2. На второй вход сумматора с выхода датчика 7 положения (обратная связь) поступает цифровой код положения N . На сумматоре формируется код разности Np-Mj-Nn., величина которого характеризует рассогласование, а знак - направление вращения вала двигателя. 6 для отработки рассогласования. Имеют место два случая. Если код разности Np лежит в диапазоне чисел 2 --1 , где га - число младших разрядов сумматора, соответствующих первой группе выходов, включая знаковый, то на выходах второй группы соответствующих старшим разрядам сумматора, а также на знаковом и выходе старшего разряда первой ГрушГы будут либо только нули, либо только единицы. Если код разности лежит в диапазоне чисел отрицательные числа ... f Np , 2 положительные числа2 де п - число старших разрядов суммаора,, то на выходах (п+1) старших азрядов сумматора (включая знаковый) удет комбинация нулей и еди1шц. В первом случае код разности, ключая знак «лежит в младших разряах сумматора 2, эти разряды необхоимо переписать р регистр 3. Во уВтором случае необходимо переисать в регистр 3 код максимального ассогласования с учетом знака раэости. Формирование управляющего кода в егистре 3 происходит следующим обазом.... После вычисления кода Np задаюий -блок 1 навтором выходе формирут сигнал записи информации в регисте 3, который поступает на входы элеентов И 12 и 13 и на вход элемента 14. Если в (п+1) старших разрядах умматора 2 зафиксированы только лио нули, либо только единицы (первый
5 . 1128
случай), то сигнал записи информации проходит только через элемент И Н и переписывает состояние младших разрядов сумматсфа 2 в регистр 3. Если же в (п+1) старших разрядах сумматора 2 зафиксирована комбинация нулей и единиц, то сигнал с выхода элемента И 11 запрещает через инвертор 15 прохождение сигнала с выкодк старнмх разрядов задающего блока 1 на регистр 3, поступает на входы злементов И 12 и 13 и, в зависимости от знака сумматора 2, пропускает через один из элементов И 12 и 13 сигнал с второго выхода задающего блока 1 соответственно на первый или второй установочный вход регистра 3, записывая в него или код максимального отрицательного рассогласования (1,0,...,0), либо код максимального положительного рассогласования (0,1,...,1). Для записи кодов максимального рассогласования используются шины установки нулей и единиц регистра 3.
Управляющий код с регистра 3 поступает на вход преобразоват1еля 4
код - напряжение. Его выходное напряжение поступает на усилитель 5 и затем на двигатель 6, угол поворота которого измеряется датчиком 7 положения.
Таким образом, независимо от величины кода рассогласования, запись информации в регистр осуществляется одним сигналом - с второго вь хода задающего устройства, что исключает имеющуюся в известном устройстве возможность записи нулевого кода в регистр на время анализа старших разрядов кода разности.
Применение предлагаемой системы позволит исключить скачки напряжения на выходе усилителя при анализе старших разрядов кода разности, что по .высит точность и плавность работы цифрового устройства управления, а также уменЫшт запаздывание в формировании управляющего напряжения дл двигателя, что повысит быстродействие системы управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая система автоматического управления | 1980 |
|
SU938254A1 |
| Цифровой следящий привод | 1983 |
|
SU1151925A1 |
| Преобразователь угла поворота вала в код | 1987 |
|
SU1451861A1 |
| Цифровая система автоматического управления | 1984 |
|
SU1208532A1 |
| Преобразователь перемещения в код | 1988 |
|
SU1571762A1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Цифровой следящий привод | 1980 |
|
SU941926A1 |
| Двухканальный цифроаналоговый следящий привод | 1988 |
|
SU1631517A1 |
| Двухотсчетный следящий привод | 1989 |
|
SU1700535A1 |
| Цифровой следящий электропривод | 1985 |
|
SU1308982A1 |
ЦИФРОВОЕ УСТРОЙСТВО УПРАВЛЕНИЯ, содержащее задающий блок, подключеннь й первым выходом к первому входу сумматора, соединенного вторым входом с выходом датчика положения, выходами старших разрядов и первым знаковым выходом - с соответствую1Щ1МИ информационньп входами регистра, а выходами младших разрядов и вторым знаковым выходом - с входами первых, инверторов и с первыми входами первого элемента ШШ, подключенного вторым входом к выходу первого знакового выхода и через второй инвертор к первому входу второго элемента ИЛИ, соединенного вторыми входами с выходаьда вторых инверторов, а выходом с первым входом первого элемента И, подключенного вторым входом к выходу первого элемента ИЛИ, а выходом к первому входу второго элемента И и первому входу третьего элемента И, соединенного вторым входом с выходом соответствующего второго инвертора, а выходом - с первым установочным входом регистра, подключенного вторым установочным входом к выходу второго элемента И, связанного вторым входом с первым знаковым выходом сумматора, преобразователь код-напряжение, подключенный входом к выходу регистра, а выходом через усилительк входу двигателя, вал которого меха- § нически связан с датчиком положения, (П отличающееся тем, что, с целью повышения точности устройства, в него введены четвертый элемент И и третий инвертор, подключенный входом к выходу первого элемента И, а выходом - к первому входу четвертого элемента И, соединенного вторым входом с вторыми выходами- задающего блока и с третьими входами второго и третьего элементов И, а выходом с управляющим входом регистра.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для двухкординатного программного управления | 1974 |
|
SU549788A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Цифровая система автоматического управления | 1980 |
|
SU938254A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
