Изобретение относится к автоматическому управлению, а именно к числовому программному управлению; может быть использовано в системах автоматического числового программного управления координатными перемещениями исполнительных органов станков.
Известны устройства для двухкоординатного программного управления, содержащие блок ввода программы, преобразователь «код - напряжение, устройство сравнения, усилитель, двигатель, преобразователь «аналог - код.
В первом устройстве измеряются приращения координат; вследствие этого случайные сбои приводят к накапливанию ощибок. Во втором устройстве измеряются полные значения координат, однако имеет место ощибка, обусловленная запаздыванием момента сравнения координат относительно момента их измерения.
Наиболее близко к предлагаемому устройство для двухкоординатного программного управления, содержащее блок ввода программы, соединенный с арифметическим блоком, подключенным по каждой координате управления через последовательно соединенные регистр, преобразователь «код - аналог, координатный привод и датчик положения к П1реобразователю «аналог - код, выход которого
подключен к другому входу арифметического блока.
В этом устройстве цифровые коды координатных скоростей вырабатываются с ошибками, обусловленными тем, что в каждом цикле момент выработки управляющих кодов координатных скоростей по каждой из координат запаздывает на определенный интервал времени относительно момента формирования цифрового кода координатного положения системы. Вследствие этого текущие координаты программного управления отрабатываются с ошибками, что снижает точность устройства.
Цель изобретения - повыщение точности программного унравления - достигается тем, что в предлагаемое устройство введены последовательно соединенные блок измерения временного интервала, входы которого подключены к выходам блока ввода программы и преобразователя «аналог-код, и времякодовый преобразователь, выход которого подсоединен к одному из входов арифметического блока.
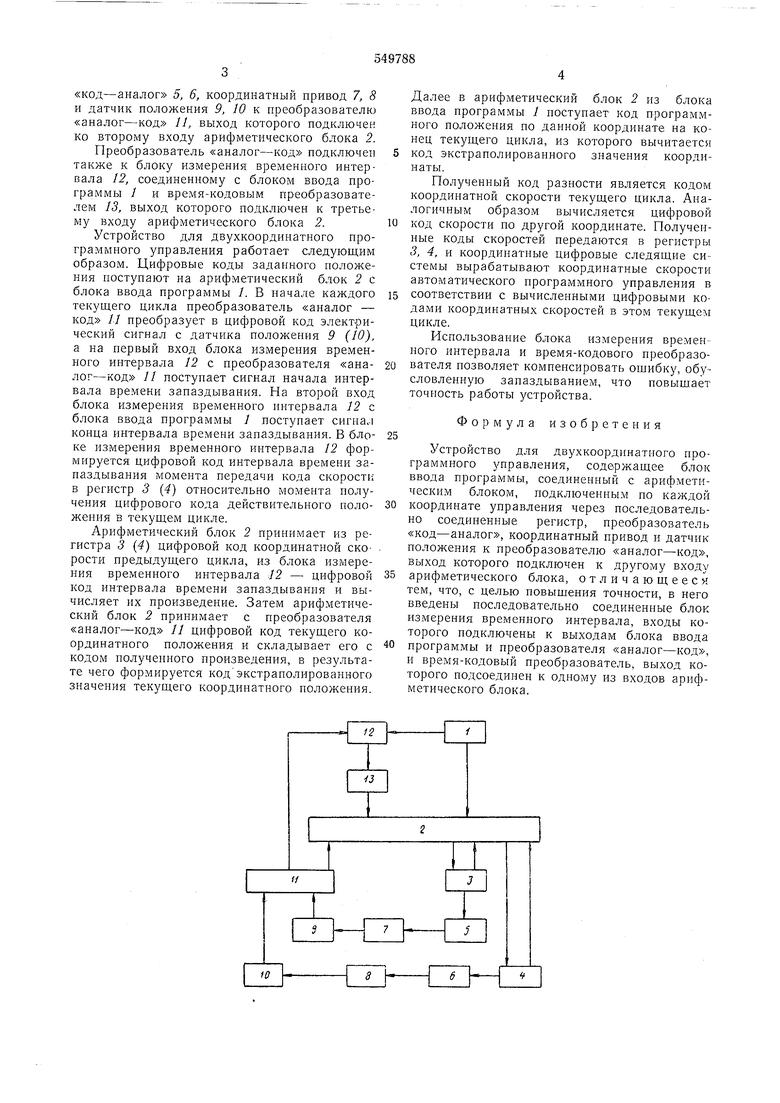
На чертеже представлена блок-схема устройства.
Блок ввода программы 1 соединен с арифметическим блоком 2, подключенным по каждой координате через последовательно соединенные регистр 3, 4, преобразователь
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатная система программного управления | 1972 |
|
SU448436A1 |
| Устройство для программного управления | 1977 |
|
SU622050A1 |
| Двухкоординатная система программного управления | 1980 |
|
SU938264A1 |
| Устройство для двухкоординатного позиционирования | 1982 |
|
SU1070512A1 |
| Система числового программногоупРАВлЕНия "TPACCA-Кп | 1979 |
|
SU813371A1 |
| Устройство для ввода-вывода информации | 1984 |
|
SU1251057A1 |
| Анализатор законов распределения | 1979 |
|
SU960845A1 |
| Многокоординатный цифровой линейный интерполятор | 1987 |
|
SU1522154A1 |
| Система программного управленияМЕТАллОРЕжущиМ CTAHKOM | 1978 |
|
SU805262A1 |
| ФОРМИРОВАТЕЛЬ ИЗОБРАЖЕНИЯ | 1993 |
|
RU2098865C1 |
