1
Изобретение относится к автомати -ческому управлению и может быть использовано в системах программного управления телескопами, станками, дн теннами слежения за космическими , обт ектами.
Известна цифровая система автоматического регулирования, состоящая из программного задающего устройства цифрового вычислительного устройства,,Q выходного регистра хранения управляющего кода, соединенного с преобразователем код-напряжение, усилителя, двигателя и датчика обратной связи, подключенного к второму входу цифро- ,5 вого вычислительного устройства.
В данной системе в цифровом вычислительном устройстве вычисляется код разности заданного и измеренного положений системы.Управляющий код форми- 20 руется по вычисленному коду разности и хранится в регистре, откуда поступает, на преобразователь код-иапряже- .. ние tOОднако из-за ограниченной точности преобразователя код-напряжение управляющий код имеет разрядность меньшую, чем максимальное число разрядов кода разности. Свертывание кода разности до требуемой разрядности управляющего кода проводится в вычислительном устройстве программно. Сложность формирования упрё1вляющего кода является недостатком таких систем.
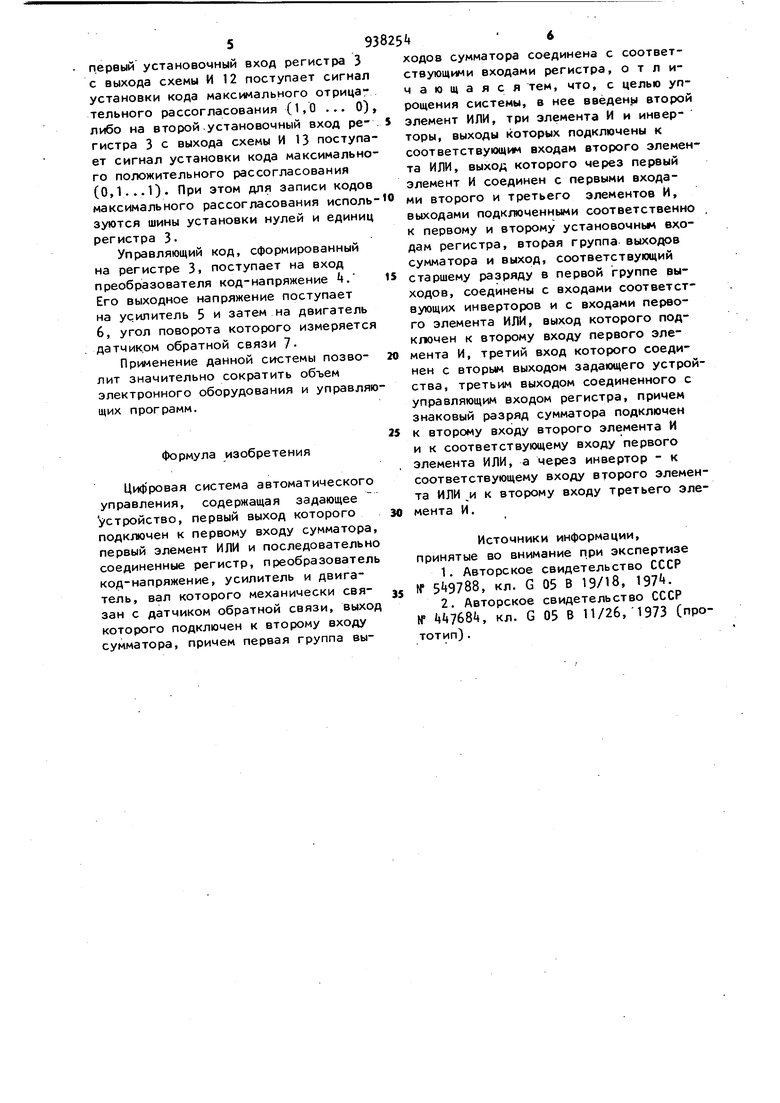
Наиболее близкой к изобретению по технической сущности является цифровая система автоматического управления, которая содержит задающее устройство, первый выход которого подключен к первому входу сумматора, первый элемент ИЛИ и последова-. тельно соединенные регистр, преобразователь код-напряжение,усилитель и двигатель, вал которого механически связан с датчиком обратной связи, выход которого подключен к второму входу сумматора, причем первая группа выходов сумматора соединена с соответствующими входами регистра 2j. В известной системе для формирования максимального значения управля щего кода используется большой объем электронного оборудования, что услож няет систему и является недостатком. Цель изобретения - упрощение системы. Поставленная цель достигается тем что в нее введены второй элемент ИЛИ три элемента И и инверторы, выходы которых подключены к соответствующим входам второго элемента ИЛИ, выход которого первый элемент И соединен с первыми входами второго и третьего элементов И, выходами подклю ченными соответственно к первому и второму установочным входам регистра, вторая группа выходов сумматора у I I jr I II г «а D /xivff fK/ia i и выход, соответствующий старшему ра ряду в первой группе выходов, соединены с входами соответствующих инвер торов и с входами первого элемента ИЛИ, выход которого подключен к второму входу первого элемента И, тре тий вход которого соединен с вторым выходом задающего устройства, третьим выходом соединенного с управляющим входом регистра, приче знаковый разряд сумматора подключен к второму входу второго элемента И и к соответствующему входу первого элемента ИЛИ, а через инвертор - к соответствующему входу второго элемента ИЛИ и к второму входу третьего элемента И. На чертеже приведена блок-схема цифровой системы автоматического управления. Она содержит задающее устройство 1, сумматор 2, регистр 3 преобразователь код-напряжение 4,усилитель 5 двигатель 6, датчик 7 обратной связи, пер аый элемент ИЛИ 8,инверторы 9, второй элемент ИЛИ 10, первый П, второй 12 и третий 13 элементы И. Система работает следующим обраЗадающее устройство 1 вырабатывает закон управления, который в виде кода N поступает на первый вход сумматора 2. На второй вход сумматора с выхода датчика 7 обратной связи поступает цифровой код N,. На сумматоре формируется код разности N,, 93 4 величина кото|Ь6го характеризует рассогласование, а знак - направление вращения вала двигателя 6 для отработки рассогласования. При этом имеют место два случая. 1 . Если код разности Np лежит в диапазоне чисел , -1, где W- число младших разрядов сумматора соответствующих первой группе выходов, включая знаковый,на выходах второй группы,соответствующих старшимразрядам сумматора, а также на знаковом и одном их выходов первой группы, соответствующем старшему разряду в данной группе, будут либо только нули, либо только единицы. 2. Если код разности N лежит в диапазоне чисел: - отрицательные числа - положительные числа 2 . где п - число старших разрядов сумматора, на выходах (п-И) старших разрядов сумматора 2 ( включая знаковый) будет комбинация нулей и единиц. В первом случае код разности, включая знак, лежит в младших разрядах сумматора 2; эти разряды следует переписать в регистр 3. Во втором случае необходимо в регистр 3 записать код максимального рассогласования с учетом знака сумматора 2. Формирование управляющего кода в регистре 3 происходит следующим образом. После вычисления кода Np, задающее устройство 1 последовательно формирует два сигнала (на выходе 3 и выходе 2. Первый сигнал переписывает состояние младших разрядов сумматора 2 в регистр 3 хранения управляющего кода. Вслед за этим второй сигнал поступает на третий вход схемы И 11. Если в Сп+1) старших разрядах сумматора 2 зафиксированы либо только нули, либо только единицы (случай 1) этот сигнал через схему И 11 не происходит и в регистре 3 сохраняется код, записанный по первому сигналу. Если же в (п+1) старших разрядах сумматора 2 зафиксирована комбинация нулей и единиц, сигнал поступает на первые входы схем И 12 и 13 и в зависимости от знака сумматора 2 проходит через одну из них. Таким образом, либо на 59 первый установочный вход регистра 3 с выхода схемы И 12 поступает сигнал установки кода максимального отрицательного рассогласования (1,0 ... 0) либо на второй.установочный вход регистра 3 с выхода схемы И 13 поступа ет сигнал установки кода максимально го положительного рассогласования (0,1...1) При этом для записи кодов максимального рассогласования исполь зуются шины установки нулей и единиц регистра 3Управляющий код, сформированный на регистре 3, поступает на вход преобразователя код-напряжение k. Его выходное напряжение поступает на ус.илитель 5 и затем на двигатель 6, угол поворота которого измеряется датчиком обратной связи 7Применение данной системы позволит значительно сократить объем электронного оборудования и управляю щих программ. Формула изобретения Цифровая система автоматического управления, содержащая задающее устройство, первый выход которого подключен к первому входу сумматора, первый элемент ИЛИ и последовательно соединенные регистр, преобразователь код-напряжение, усилитель и двигатель, вал которого механически связан с датчиком обратной связи, выход которого подключен к второму входу сумматора, причем первая группа вы+ходов сумматора соединена с соответствующими входами регистра, отличающаяся тем, что, с целью упрощения системы, в нее введены второй элемент ИЛИ, три элемента И и инверторы, выходы которых подключены к соответствующим входам второго элемента ИЛИ, выход которого через первый элемент И соединен с первыми входами второго и третьего элементов И, выходами подключенными соответственно к первому и второму установочным входам регистра, вторая группа выходов сумматора и выход, соответствующий старшему разряду в первой группе выходов, соединены с входами соответствующих инверторов и с входами первого элемента ИЛИ, выход которого подключен к второму входу первого элемента И, третий вход которого соединен с вторым выходом задающего устройства, третьим выходом соединенного с управляющим входом регистра, причем знаковый разряд сумматора подключен к второму входу второго элемента И и к соответствующему входу первого элемента ИЛИ, а через инвертор - к соответствующему входу второго элемента ИЛИ и к второму входу третьего элемента И. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 5+9788, кл. G 05 В 19/18, 197. 2.Авторское свидетельство СССР If Mi 768i4, кл. G 05 В 11/26,1973 (прототип) .
/5
П
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровое устройство управления | 1983 |
|
SU1128221A1 |
| Цифровой имитатор воздушных давлений | 1985 |
|
SU1265728A1 |
| Преобразователь угла поворота вала в код | 1987 |
|
SU1451861A1 |
| Цифровое устройство фазовой синхронизации | 1985 |
|
SU1246395A1 |
| Цифроаналоговая следящая система | 1989 |
|
SU1700536A1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Устройство для управления электродвигателем переменного тока | 1984 |
|
SU1457141A1 |
| Инкрементный умножитель аналоговых сигналов | 1983 |
|
SU1113820A1 |
| Цифровая система автоматического управления | 1984 |
|
SU1208532A1 |
| Цифровой следящий привод | 1983 |
|
SU1151925A1 |
и
