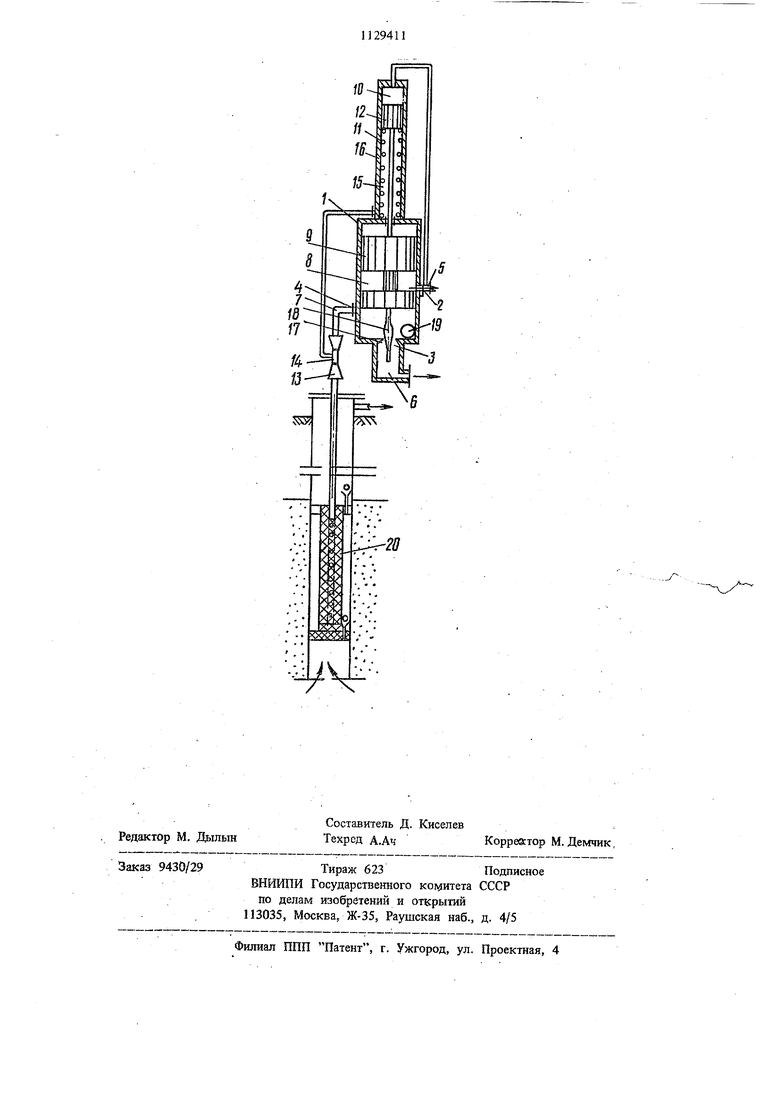
Изобретение относится к машиностроению, в частности к .органам управления гидравличес кими машинами, и может быть использовано в гидроприводах для подъема жидкости из скважин посредством глубинных насосов с гид равдическим приводом. Известен механизм дистанционного гидравлического управления бесштанговым насосом, содержащий двухцилиндровый золотник, подрегулятор поршневой, трубку Вентури, обратные клапаны, сливной бак и систему каналов 1. Недостатком данного механизма управления является наличие в них нескольких пружин с различными характеристиками, размещенных в двухцилиндровом золотнике, подрегуляторе и обратном клапане, которые взаимодействуют между собой при изменении давления, что затрудняет регулирование и снижает надежность работы. Известен механизм дистанционного гидравлического управления исполнительным органом глубинного насоса, содержащий размещенные в корпусе с окнами, связанными с напорной, сливной и рабочей магистралями, регулятор, выполненный в виде двухпояскового поршня и установленный с возможностью попеременного подключения рабочей магистрали к магистралям напора или слива, .кинематически связан ный с ним подрегулятор в виде подпружиненного поршня и трубку Вентури, установленную в рабочей магистрали, связанную своим характеристическим сечением с пружинной полостью подрегулятора 2. Недостатками известного механизма являются сложность конструкции и, как следствие, малая надежность. Цель изобретения - повышение надежности. Указанная цель достигается тем, что в меха низме дистанционного гидравлического управле ния исполнительным органом глубинного насоса, содержащем размещенные в корпусе с окнами, связанными с напорной, сливной и рабочей магистралями, регулятор, выполненный в виде двухпояскового поршня и установленный с возможностью попеременного подключения рабочей магистрали к магистралям напора или слива, кинематически связанный с ним подрегулятор в виде подпружиненного поршня и трубку Вентури, установленную в рабочей магистрали, связанную своим характеристическим сечением с пружинной полостью подрегулятора, корпус имеет дополнительную камеру, в которой установлен поршень подрегулятора, в сливной магистрали дополнительно установлен регулируемый дроссель, кинематически связанный с поршнем регулятора, а последний снабжен упругим элементом для его переключения в одной из крайних позиций. Кроме того, регулируемый дроссель выполнен в виде диска, жестко связанного с поршнем регулятора и установленного в сливном окне. На чертеже показан механизм дистанционного гидравлического управления исполнительным органом глубинного насоса. Механизм содержит корпус 1 с окнами 2, 3 и 4, связанными с напорной 5, сливной 6 и рабочей 7 магистралями, регулятор 8, выполненный в виде двухпояскового поршня 9 и установленный с возможностью попеременного подключения рабочей магистрали 7 к. магистралям напора 5 и слива 6, кинематически связанный с ним подрегулятор 10 в виде подпружиненного пружиной 11 поршня 12 и |Трубку Вентури 13, установленную в рабочей магистрали 7, связанную своим характеристическим сечением 14 с пружинной полостью 15 подрегулятора 10. Корпус 1 имеет дополнительную камеру 16, в которой установлен поршень 12 подрегулятора 10.. В сливной магистрали 6 дополнительно установлен регулируемый дроссель 17, в который входит диск 18, жестко связанный с поршнем 9, установленный в сливном окне 3. Поршень 9 регулятора 8 снабжен упругим элементом 19 для переключения в одной из крайних позиций. Механизм управляет рабочим органом 20. Механизм работает следующим образом. Пориши 9 и 12 под действием пружины 1 находятся в верхнем положении, ,прй котором нижний поясок двухпояскового поршня 9 разобщает рабочее окно 4 от напорного окна 2, соединенного с напорной магистралью 5. Одновременно напорная магистраль 5 сообщена с надпорщневым пространством подрегулятора 10. При таком положении механизма . давление рабочей жидкости, подаваемой по напорной магистрали 5 на поршень 12, опускает поршни 9 к 12, сжимая пружину 11 j Рабочая жидкость из подпоршневой полости Подрегулятора 10 вначале вытекает через характеристическое сечение 14 трубки Вентури 13, рабочее окно 4 и сливное окно 3 с дросселем 17 на слив. Затем, когда .нижний поясок двухпояскового поршня 9 перекроет сливное окно 4, рабочая жидкость из подпоршневой полости подрегулятора 10 поступает в рабочую магистраль 7. Такая подача рабочей жидкости приводит к соответствующему повышению давления в рабочей магистрали 7. Расчеты показывают, что это повышение давления существенно не отразится на торможении поршней 9 и J2 в связи с малым повышением в этот момент давления в рабочей магистрали 7. При дальнейшем движении поршней 9 и 12 нижний поясок двухпояскового поршня 9 открывает рабочее окно 4 и рабочая жидкость из напорной магистрали 5 устремляется через трубку Вентури 13 в рабочую магистраль 7 далее к исполнительному органу 20, например к глубинному насосу, который при этом выполняет нагнетания. Такое положение поршней 9 и 12 обеспечивается образованием скоростного перепада давления в характеристическом сечении 14 трубки Вентури 13. Для торможения поршней 9 и 12 в момент , прохождения диска 18 на стержне двухпояскового поршня 9 через сливное окно 3 может i6biTb применен упругий элемент 19, например воздушный шарик; помещенный в подпоршневую полость регулятора 8. С окончанием цикла нагнетания исполнительным органом 20 поток рабочей жидкости через трубку Вентури 13 прекращается, исчезает скоростной перепад давления, поршни 9 к 12 становятся неуравновешенными и начинают под действием пружины 11 возвращаться в исходное положение, т. е. подниматься. С перекрытием нижним пояском двухпояскового поршня 9 рабочего окна 4, т. е. несмотря на отключение напорной магистрали 5 от трубки Вентури 13, подъем поршней 9 и 12 продолжается под действием давления в рабочей магистрали 7, I поддерживаемого исполнительным органом 20. С момента открытия рабочего окна 4, т. с. с наступлеьшем гидравлической связи трубки Вентури 13, рабочей магистрали 7 и исполнительного органа 20 с подпорш}1евой полостью регулятора 8, который совпадает с перекрытием сливного окна 3 в подпоршневой полости регулятора 8, возникает давление, которое стимулирует подъем поршней 9 и 12 до исходного положения, т. е. до полного открытия рабочего окна 4. Нахождение поршней 9 и 12 в верхнем положении обеспечивается давлением, образующимся в подпоршневой полости регулятора 8 под действием исполнительного органа 20 при совершении всасывания. С прекращением этого гкикла давление в подпоршне вой полости регулятора 8 исчезает, поршни 9 и 12 становятся неуравновешенными и опускаются, и цикл нагнетания исполнительным органом 20 возобновляется с последующим повто- рением рйбочих циклов. С исчезновением давления в подпоршневой полости регулятора 8 при завершении цикла всасывания упругий : элемент 19 оздушный шарик) приобретает исходное положение, реализуемое при следующем цикле. Данный механизм дистанционного гидравлического управления исполнительным органом глубинного насоса отличается простотой изготовления и обслуживания, что повышает надежность работы.
553
| название | год | авторы | номер документа |
|---|---|---|---|
| Система дистанционного гидравлического управления | 1978 |
|
SU866275A1 |
| Механизм дистанционного гидравлического управления исполнительным механизмом | 1979 |
|
SU857548A1 |
| Механизм дистанционного гидравлического управления исполнительным механизмом | 1980 |
|
SU985423A1 |
| Регулятор расхода жидкости | 1982 |
|
SU1113784A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2002 |
|
RU2218486C1 |
| Устройство для дистанционного управления коробкой передач транспортного средства | 1977 |
|
SU737257A1 |
| Генератор импульсов давления | 1981 |
|
SU1029920A1 |
| Двигатель внутреннего сгорания с гидравлическим приводом | 1985 |
|
SU1301998A1 |
| Регулятор скорости гидродвигателя | 1978 |
|
SU857547A1 |
| ГИДРОСИСТЕМА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2003 |
|
RU2252909C2 |
1. МЕХАНИЗМ ДИСТАНЦИОННОГО ГИДРАВЛИЧЕСКОГО УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ ОРГАНОМ ГЛУБИННОГО НАСОСА, содержащий размещенные в корпусе с окнами, связанными с напорной, сливной и рабочей магистралями, регулятор, выполненный в ввде двухпояскового поршня и установленный с возможностью попеременного подключения .рабочей магистрали к магистралям напора или слива, кинематически связанный с ним подрегулятор в виде подпружиненного поришя и трубку Вентури, установленную в рабочей магистрали, связанную своим характеристическим сечением с пружинной полостью подрегулятора, отличающийся тем, что, с .целью повышения надежности, корпус имеет дополнительную камеру, в которой установен поршень подрегулятора, в сливной магистрали дополнительно установлен регулируемый дроссель, кинематически связанный с поршнем .регулятора, а последний снабжен упругим элементом для его переключения в одной из крайних позиций. 2. Механизм по п. 1, о т л и ч а ю i ш и и с я тем, что регу шруемый дроссель выполнен в виде диска, жестко связанного (Л с поршнем регулятора и установленного в слквном окне.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРОПОРШНЕВЫМ БЕСШТАНГОВЫМ ГЛУБИННЫМ НАСОСОМ | 0 |
|
SU203419A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Механизм дистанционного гидравлического управления исполнительным механизмом | 1979 |
|
SU857548A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
