Изобретение относится к объекШому гидроприводу и может быть использовано для дистанционного управления исполнительными механизмами различных машин.
Известен механизм дистанционного гидравлического управления исполнительным механизмом,например глубинным бесяитанговым насосом, содержащий корпус, рабочую гидррлинию, сообщенную с напорной и сливной гидролиниями через трубки Вентури, золотниковый распределитель, золотник которого подпружинен с двух сторон и установлен в корпусе с образованием торцовых полостей, связанных с характеристическими сечениями трубок Вентури, и приводной механизм для перемещения золотника в нейтральном положении 1.
Недостатком известного механизма является малый срок службы, обусловленный падением магнитных свойств ,магнита примененного в механизме для перемещения золотника в нейтральном положении.
Цель изобретения - увеличение срока службы.
Поставленная цель достигается тем, что приводной механизм выполнен в виде двух аккумуляторов, цилиндров,
закрепленных на корпусе, и размещенных в них плунжеров,установленных на торцах золотника, причем полость каждого цилиндра сообщена с одной из торцовых полостей через обратный клапан и с одним из аккумуляторов через другой обратный клапан и через канал, подключенный к цилиндру с возможностью сообщения с полостью пос10леднего при нейтральном положении золотника.
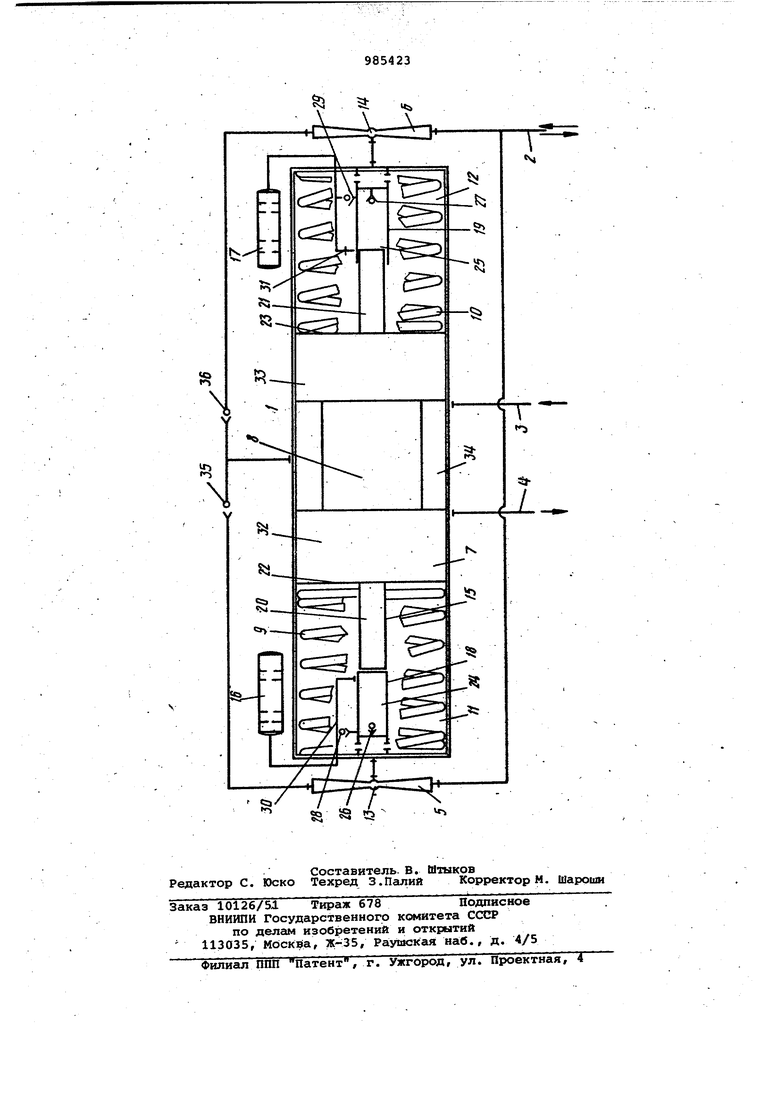
На чертеже представлена принципиальная схема предлагаемого механизма.
15
Механизм дистанционного гидравлического управления исполнительным механизмом, нап|ример глубинным бесшТанговым насосом, содержит корпус
д 1, рабочую гидролинию 2, сообщенную с напорной 3 и сливной 4 гидролиниями через трубки 5 и 6 Вентури, золотниковый распределитель 7, золотник 8 которого поджат пружинами 9 и .10 с двух сторон и установлен в корпусе
25 1 с образованием торцовых полостей , 11 и 12, связанных с характеристическими сечениями 13 и 14 трубок 5 и 6 Вентури, и приводной механизм 15 для перемещения золотника 8 в нейтральном
30 положении. Приводной механизм 15 выполней в виде двух аккумуляторов 16 к 1.7f цилиндров 18 и 19, закрепленных на корпусе 1, и. размещенных в них плунжеров 20 и 21, установленных на торцах 22 и 23, золотника 8, причем полость 24 и 25 каждого цилиндра 18 и 19 сообщена с одной из торцовых полостей 11 и 12 через; обратный клапан 26 и 27 и с одним из аккумуляторов 16 и 17 через другой обратный клапан 28 и 29 и через канал 30 и 31 подключенный к цилиндру 18 и 19 с возможностью сообщения с полостью 24 и 25 последнего при нейтральном пололсении золотника 8. Золотник 8 имеет два бурта 32 и 33, полость 34 между- которыми отделена от трубки
5Вентури обратным клапаном 35 и связана с трубкой 6 через обратный клапан 36.
Механизм работает следующим образом.
При отсутствии давления в напорно гидролинии 3 золотник 8 при помощи аккумулятора 1§, например, путем снятия его поршня (не noKa3aHj с упора устанавливается в положение, при котором, как показано на чертеже, напорная гидролиния 3 соединяется с полостью 34, а сливная гидролиния 4 перекрыта буртом 32 золотника 8 и торец 23 прижат к пружине 10.
В результате подъема давления в напорной гидролинии 3 рабочая жидкость из нее поступает в полость 34 и далее обратный клапан 36, трубку
6Вентури в рабочую гидролинию 2, связанную, например, с бесштанговым насосом (не показан) , ко-горый ндчинает совершать цикл нагнетания. При движении рабочей жидкости через трубку 6 Вентури давление в ее характеристическом сечении 14 падает, в
то время как в характеристическом сечении 13 трубки 5 Вентури, связанной с рабочей гйдролинией 2, давЗтенй равно давлению в последней ибо рабочая жидкость через трубку 5 йё течет. Под действиемперепада.давлений в торцовых полостях 11 и 12, сорбщенных с характеристическими сечениями 13 и 14, золотник 8 перемещается вправо (по чертежу, сжимая пружину 10 и нагнетая плунжером 21 рабочую жидкость через обратный KJianaH 29 в аккумулятор 17, заряжая его. В это время плунжер 20 через обратны клапан 26 засасывает -жидкость из тор цовой полости 11 в цилиндр 18.
С завершением цикла нагнетания двюкение рабочей жидкости из напорной гидролинии 3 в рабочую гидролинию 2 прекращается,.давления в харак теристических сечениях 13 и 14 трубок 5 и б Вентури выравниваются и золотник 8 под действием пружины 10. перемещается влево, при зтом плунжер J21 засасывает рабочую жидкость из л
торцовой полости 12 через обратнай клапан 27. Еще до полного расслабле-НИЛ пружины 10 канал 31 сообщается с полостью 25 цилиндра 19 и аккумулятор ,17 разряжается в эту полость, перебрасывая золотник 8 через нейтральное положение. Полость 34 отделяется от напорной гидролинии 3 и сообщается со сливной 4. С этого момента начинаете цикл всасывания бесштангового насоса, во время которого рабочая жидкость из рабочей гидролинии 2 через трубку 5 Вентури, обратный клапан 35 и полость 34 отводится в сливную гидролинию 4. Теперь перепад давления в характеристических сечениях 13 и 14 трубок 5 и.6 Вентури перемещает золотник влево, заряжая аккумулятор 16, который в конце акта всасывания возвращает золотник 8 в положение, изображенное на чертеже. Таким образом обеспечивается автоматическое чередование актов нагнетания и всасывания.
Использов&ние принципа аккумулирования энергии в процессе рабочего перемещения управляемого механизма для реализации этой энергии при переключении золотника 8 через нейтреипное положение позволило отказаться от применения в механизме управления от постоянного магнита/ теряющего со временем свои магнитные свойства, и тем самым, повысить срок службы устройства.
Формула изобретения
Механизм дистанционного гидравлического уЬравления исполнительным механизмом, например .глубинным бесштанговым насосом, содержащий корпус, рабочую гидролинию, сообщенную с напорной и сливной гидролиниями через трубки Вентури, золотниковый распределитель, золотник которого подпружинен с двух сторон и установлен в корпусе с образованием торцовых полостей, связанных с характеристическими сечениями трубок Вентури, и приводной механизм для перемещения золотника в нейтральном положении, отличающийся тем что, с целью увеличения срока службы, призвод.ной механизм в1ыполнен в виде двух аккутлуляторов, цилиндров закрепленных на корпусе/ и размещенных в них плунжеров, установленных на торцах золотника, причем полость каждого цилиндра сообщена с одной из торцовых полостей через обратный клапан и с одним из аккумуляторов через другой обратный клапан и черезканал,подключенный к цилиндру с возможностью сообщения с полостью последнего при нейтральном положении золотника. .
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 857548, кл. F 04 F 49/00, 1979.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм дистанционного гидравлического управления исполнительным механизмом | 1979 |
|
SU857548A1 |
| Система дистанционного гидравлического управления | 1978 |
|
SU866275A1 |
| Механизм дистанционного гидравлического управления исполнительным органом глубинного насоса | 1982 |
|
SU1129411A1 |
| Гидропривод | 1984 |
|
SU1199982A1 |
| СЕКЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С МЕХАНИЧЕСКИМ РУЧНЫМ УПРАВЛЕНИЕМ И РАБОЧАЯ СЕКЦИЯ СЕКЦИОННОГО ГИДРОРАСПРЕДЕЛИТЕЛЯ С МЕХАНИЧЕСКИМ РУЧНЫМ УПРАВЛЕНИЕМ | 2006 |
|
RU2320903C1 |
| СЕКЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С МЕХАНИЧЕСКИМ РУЧНЫМ УПРАВЛЕНИЕМ И РАБОЧАЯ СЕКЦИЯ СЕКЦИОННОГО ГИДРОРАСПРЕДЕЛИТЕЛЯ С МЕХАНИЧЕСКИМ РУЧНЫМ УПРАВЛЕНИЕМ | 2006 |
|
RU2320902C2 |
| Гидравлическая система комбайна | 1988 |
|
SU1561879A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ РАБОЧИМИ МЕХАНИЗМАМИ | 1974 |
|
SU440816A1 |
| СЕКЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С ПРОПОРЦИОНАЛЬНЫМ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ УПРАВЛЕНИЕМ | 2001 |
|
RU2193701C1 |
| Система автоматической стабилизации положения остова крутосклонного транспортного средства | 1988 |
|
SU1521616A1 |