2. Конвейер по п.1, о т л и ч а tout и и с я тем, что платформы выполнены в виде ступеней с горизонтальными и наклонными частями, при этом горизонтальная часть ступени снабжена осью с возможностью перемещения
вдоль наклонной части соседней ступени, а привод каждой ступени содержит цепную передачу, на тяговой ветви которой расположены зубья, взаимодействующие с осью горизонтальной части ступени.
| название | год | авторы | номер документа |
|---|---|---|---|
| Линия для производства формового хлеба | 1980 |
|
SU938878A1 |
| ТРАНСПОРТИРУЮЩЕЕ УСТРОЙСТВО | 2007 |
|
RU2478076C2 |
| ДВИЖИТЕЛЬ | 2007 |
|
RU2344961C1 |
| ПРИВОДНОЕ СРЕДСТВО И ЦЕПНОЙ ПРИВОД | 2008 |
|
RU2438054C1 |
| Загрузочное устройство | 1984 |
|
SU1222604A1 |
| ЛЕСТНИЧНЫЙ ПОДЪЕМНИК | 2019 |
|
RU2703812C1 |
| Конвейер | 1983 |
|
SU1134486A1 |
| ПРИВОДНОЕ УСТРОЙСТВО ДЛЯ ЗВЕЗДОЧЕК ЦЕПНЫХ ПРИВОДОВ | 2004 |
|
RU2343279C2 |
| Агрегат для расстойки тестовых заготовок | 1978 |
|
SU768381A1 |
| СУШИЛКА РОЛИКОВАЯ СЕКЦИОННАЯ С СОПЛОВЫМИ КОРОБАМИ, ПРИВОДОМ И МЕХАНИЗМАМИ ЗАГРУЗКИ И ВЫГРУЗКИ С ЛЕНТОЧНЫМ КОНВЕЙЕРОМ | 2009 |
|
RU2430004C1 |
I.КОНВЕЙЕР, содержащий платформы, подвижно соединенные между собой и снабженные автономными приводами, отличающийся тем, что, с целью повЕлпения произво днтельности конвейера путем обеспечения возможности движения платформ с разяич1и)МИ скоростями одна относительно другой н сохранения постоянг ного расстояния между точ1сами подвижного соединения платформ, после соединения последних проекция линии соединякщей точки подвижного соединения платформ, на линию направле. ния движения прямо пропорциональна скорости движения платформ. ,
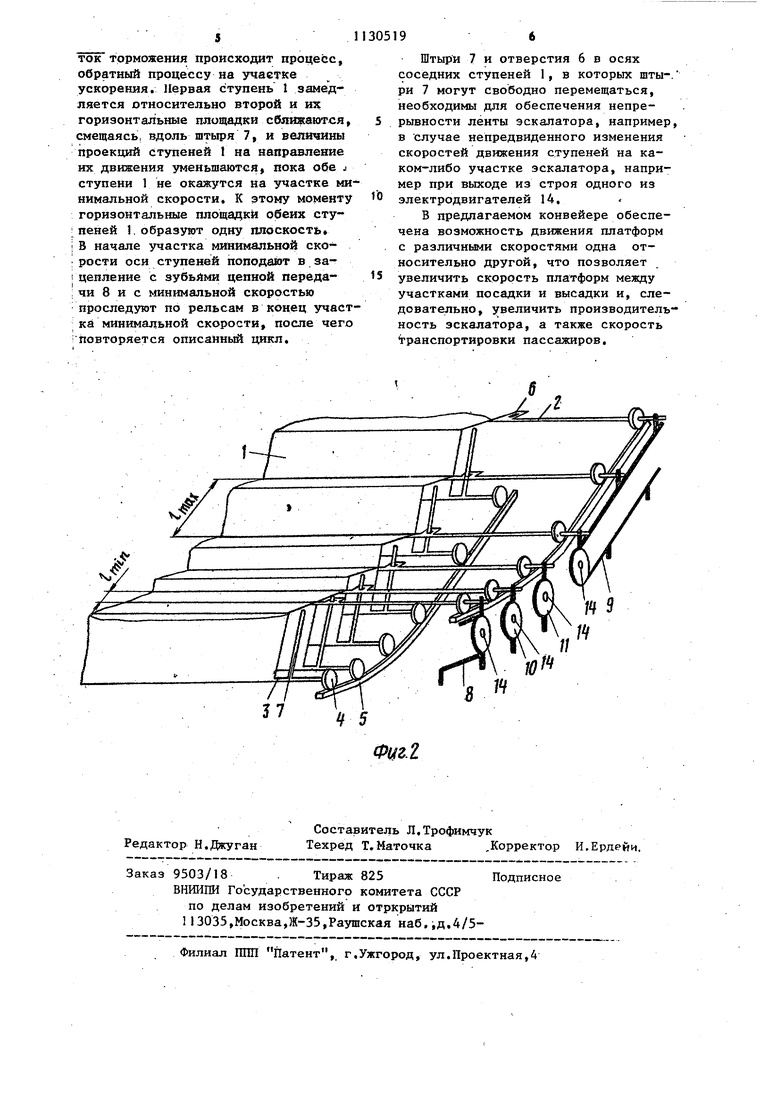
Изобретение относится к подъемно транспортным машинам непрерывного действия. Известен конвейер, содержащий платформы, подвижно соединенные меж ду собой я снабженные автономными приводами J . Недостаток известного конвейера заключается в его низкой производительности, Цель изобретения - повышение пр изводительности конвейера, путем обеспечения возможности движения платформы с различными скоростями одна относительно другой и сохранения постоянного расстояния между точками подвижного соединения платформ. Цель достигается тем, что в конв йере, содержащем платформы, подвижн соединенные между собой и снабженны автономными приводами, после соединения платформ проекция линии, соединяющей точки подвижного соединения платформ, на линию направления движения прямо пропорциональна скорости движения платформ. Кроме того, платформы вьшолнены виде ступеней с горизонтальными и . наклонными частями, при этом горизонтальная часть ступени снабжена осью с возможностью перемещения вдоль наклонной части соседней ступени, а привод каждой ступени содер жит цепную передачу, на тяговой вет ви которой расположены зубья, взаимодействующие с осью горизонтальной части ступени.j На фиг.1 схематически изображен конвейер;на фиг.2 - конец участка конвейера, где ступени двигаются с наименьшей скоростью, участок кон вейера, где скорость увеличивается. и начало участка конвейера, где скорость ступеней наибольшая. Конвейер состоит из бесконечной ленты, образуемой ступенями I. .; : Каждая ступень 1 опирается горизонтальной частью на ось 2,. наклонной частью на ось 3, которые с помощью колес 4 с ребордами опираются на рельсы 5. В осях 2 имеются отверстия 6, в которые свободно проходят штыри 7, параллельные наклонным плос костям ступеней и жестко соединенные с осями 3. Конвейер имеет участки, скорости ступеней на которых различные. Эти участки расположены в следующей последовательности: участок минимальной скорости, участок ускорения, участок максимальной скорости, участок торможения. На участках с минимальной и максимальной, скоростями на фиг.1 изображены только начало и конец,посколь ку зти участки однородны по всей длине. Вдоль участка минимальной скорости расположена цепная передача 8, вдоль участка максимальной скорости - цепная передача 9. Вдоль участка ускорения расположены передачи типа звездочка 10 и II, вдоль участка торможения - передачи типа звездочка 12 и 13. Все передачи снабжены электродвигателями 14, к которым подведено питание,что в графических материалах; не отражено. Рельсы, электродвигатели и передачи снабжены опорами (не показано). . Принцип работы и закономерности конструкции предлагаемого конвейера объясняет формула Г. АвИ; АВМ скорость движения ступени на рассматриваемом участке и на участке минимальной скорости; д - величина проекции ступени,находящейся на рассматриваемом участке, на направле ние ее движения; и,;, величина проекции ст пени, находящейся на участке минимальной скорости, на направление ее движения. Под величиной проекции ступени на направление ее движения подразумевается проекция той части ступени которая расположена между местами соприкосновения данной ступени с соседними ступенями, а .под минималь ной, скоростью ступени подразумевает ся скорость, обеспечивакщая нормаль ную посадку и высадку пассажиров обычно равную I м/с. Из формулы (1) следует, что max min - скорость движения ступене на участке максимальной скорости; величина проекции ступени находящейся на участке максимальной скорости, на направление ее движения, Из формулы (2) следует, что размеры ступеней 1 определяют максимал ную скорость, которая может быть достигнута конвейером. Величина про екции ступени 1 на направление ее движения зависит от расположения участков рельсов 5, на которых находятся колеса 4 данной ступени 1. Таким образом, взаимное расположение на каждом участке рельсов 5, по которым движутся оси 2 и 3, определяется скоростью,которой должны обладать ступени 1 на данном участк и размерами ступеней 1, Таким образом, электродвигатель приводящий в действие цепную передачу 8, должен обеспечивать движег ние ступеней с минимальной скорость а электродвигатель 14, приводящий в действие цепную передачу 9, должен обеспечивать движение ступеней с ма симальной скоростью. Электродвигатели 14,..приводящие в действие передачи типа звездочка 10 и 11, обеспечивают равномерное возрастание скорости ступеней от минимальной до максимальней, а электродвигатели 14, приводящие в действие передачи типа звездочка 12 и 13, обеспечивают равномерное уменьшение скорости ступеней от максимальной до минимальной . Работа конвейера на примере двух соседних ступеней 1, находящихся на участке минимальной скорости. Зубья цепной передачи 8, приводимые в движение электродвигателем 14, толкая оси 2 этих ступеней, вынуждают ступени 1 катиться на колесах 4 по рельсам 5 с минимальной скоростью. При этом их горизон- альные части лежат в одной плоскости и величина проекции каждой ступени 1 на направление ее движения минимальна, т.е. равна проекции горизонтальной части ступени I. При переходе первой ступени 1 на участок ускорения ее ось 2 попадает в зацепление с зубьями звездочки 10, которая придает этой ступени I ускорение относительно второй ступени 1, которая еще двигается по участку минимальной скорости. При этом горизонтальная плоскость первой ступени 1 начнет удаляться от горизонтальной плоскости второй ступени 1, перемещаясь вдоль штыря 7. Когда ось 2 второй ступени попадает на участок ускорения, войдет в контакт с зубьями первой передачи типа звездочка 10 и ускорится, ось 2 первой ступени войдет в контакт с зубьями второй передачи типа звездочка II и ее ускорение еще больше возрастет. Таким образом, ускорение первой ступени 1 относительно второй сохраняется, смещение их горизонтальных плоскостей продолжается и величина проекции ступеней 1 на направление их движения увеличивается. К моменту, когда смещение горизонтальных площадок ступеней I достигнет максимума, обе ступени 1 окажутся на участке максимальной скорости.- На участке максимальной скорости ступени 1 двигаются с одинаковой скоростью, не смещая гь относительно друг друга, и величины их проекций на направление движения максимальны. При попадании ступеней Г на учас
| КОлейник A.M | |||
| и Поминов И.Н | |||
| Эскалаторы | |||
| М., Машиностроение, 1973,с.7-9 (прототип) |
