Изобретение относится к промышленному транспорту, касается загрузочных усройств с возвратно-поступательным движением грузоносителей и может быть применено в качестве загрузочного устройства штучных грузов с приводного роликового конвейера на автоматический стеллажный кран-штабелер.
Цель изобретения - повышение точности позиционирования груза на опорной площадке.
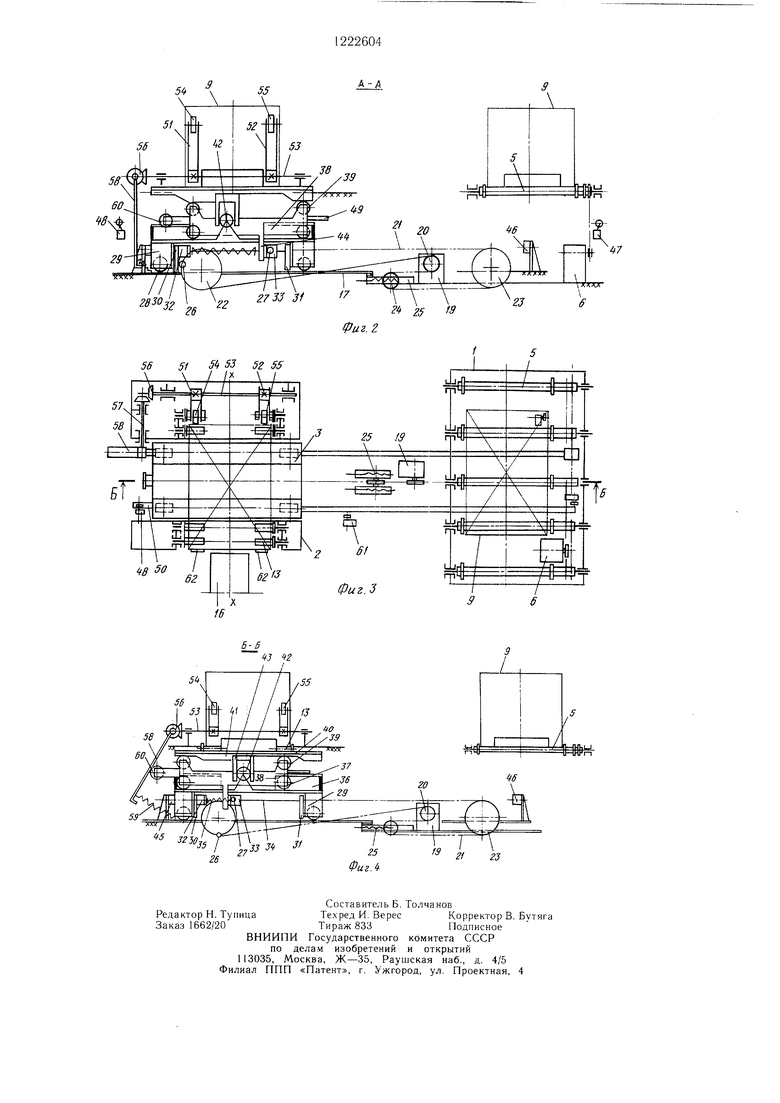
На фиг. 1 изображено загрузочное устройство с произвольным расположением груза вдоль оси X-X, вид сверху (пунктиром показано положение грузовой тележки при перегрузке с роликового конвейера); на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - загрузочное устройство, после коррекции расположения груза вдоль оси X-X, вид сверху; на фиг. 4 - разрез Б-Б на фиг. 3.
Загрузочное устройство содержит при водной роликовый конвейер 1, расположенную параллельно опорную площадку 2 и взаимосвязывающую конвейер 1 и площадку 2 грузовую тележку 3.
Роликовый конвейер 1 состоит из соединенных между собой цепными передачами 4 роликов 5, связанных с приводом 6, цепной передачей 7, причем привод 6 содержит электродвигатель, редуктор и тормоз (не показаны).
На позиции перегрузки роликовый конвейер 1 снабжен концевым выключателем 8, который отключает привод б, обеспечивая остановку груза 9. Ролики 5 снабжены ребордами 10 и 11, обеспечивающими прямолинейное движение груза 9 вдоль конвейера 1.
Опорная площадка 2 состоит из стационарной рамы 12, на которой закреплены ролики 13 с возможностью свободного вращения. Ролики 13 расположены в два ряда и снабжены ребордами 14 и 15, обеспечивающими движение груза 9 вдоль оси Х-Х, причем они не мешают выдвижению грузо захвата 16 автоматического стеллажного крана-штабелера.
Грузовая тележка 3 установлена на основании 17, на котором закреплены рельсы 18 для опоры тележки, реверсивный привод 19, включающий электродвигатель, редуктор, тормоз (не показаны) и звездочку 20, закрепленную на редукторе посредством, например, фрикционной муфты (не показана), обеспечивающей проскальзывание звездочки 20 в случаях внезапных перегрузок. Нередача движения от привода 19 на тележку 3 производится бесконечным тяговым (цепным) органом 21, огибающим звездочки 22 и 23 и звездочку 24 с натяжным устройством 25. На цепном органе 21 (фиг. 2) закреплены толкатели 26 и 27, которые приводят в движение опирающуюся на колеса
28 раму 29 с неподвижными упорами 30 и 31 и подвижными подпружиненными упорами 32 и 33. Упоры 32 и 33 (фиг. 4) подвижно смонтированы на осях 34 и подпру- жинены в сторону упоров 30 и 31 пружиной 35. На раме 29 в горизонтальных направляющих 36 смонтирована на катках 37 промежуточная рама 38 с роликами 39, удерживающими подъемную грузонесу- щую платформу 40.
Платформа 40 снабжена копиром 41, поверхность которого состоит из горизонтальных и наклонных участков, образующих выступы и впадины. Для исключения горизонтального смещения платфор.мы
40 относительно рамы 29 на последней смонтирован ограничитель 42 в виде катка, а на платформе 40 - вилка 43, охватывающая ограничитель 42.
Для перемещения промежуточной рамы 38 посредством толкателей 26 и 27
через упоры 32 и 33 на ра.ме 38 предусмотрен упор 44.
На основании 17 расположены упоры ограничители 45 и 46, ограничивающие передвижные рамы 29 при прямом и обратном ходах, а также выключатели 47 и 48, отключающие привод 19 при наезде щин 49 и 50, закрепленных на промежуточной раме 38, причем щина 49 взаимодействует с выключателем 47 в зоне конвейера 1 в момент подъема платформы 40, а щина 50 - с выключателем 48 в зоне площадки 2 после опускания груза 9 на ролики 13 и перемещения его вдоль оси X-X до точного позиционинования груза 9 относительно грузозахвата 16.
Перемещение груза 9 по роликам 13
производится толкающими рычагами 51 и 52, закрепленными на валу 53. Рычаги 51 и 52 снабжены на свободных концах катками 54 и 55 для качения по грузу 9 во время перемещения. Вал 53 закреплен
на раме 12 и соединен посредством конической зубчатой пары 56 с валом 57, который также закреплен на раме 12 и расположен перпендикулярно валу 53. На валу 57 жестко закреп.лен управляющий рычаг 58, который подпружинен пружиной 59
в сторону рамы 12 и взаимодействует при движении промежуточной рамы 38 с толкателем в виде катка 60, жестко закрепленным на раме 38. При поднятой грузоне- сущей платформе 40 управляющий рычаг
58 подпружинен в сторону рамы 12 и расположен в вертикальной плоскости, а тол- рычаги 51 и 52 - во взаимно перпендикулярной вертика.тьной плоскости, обеспечивая свободный провоз груза 9 с допуском, позволяющим позиционирование
груза на конвейере 1.
Для накопления груза 9 на промежуточной позиции между конвейером 1 и площадкой 2 непосредственно на грузовой тележке 3 на основании 17 предусмотрен конечный выключатель 61, отключающий привод 19 при занятой грузом площадке 2, о чем свидетельствует сигнал датчика наличия груза (не показан).
Загрузочное устройство работает следующим образом.
Груз 9 поступает (фиг. 1) по роликовому конвейеру I на позицию перегрузки и наезжает на выключатель 8. По сигналу с выключателя 8 отключается привод 6 и включается привод 19, приводя в движение тяговый орган 21 в сторону упора 46, а под действием толкателя 27 на упор 31 перемещается рама 29. При этом груз 9 может
10
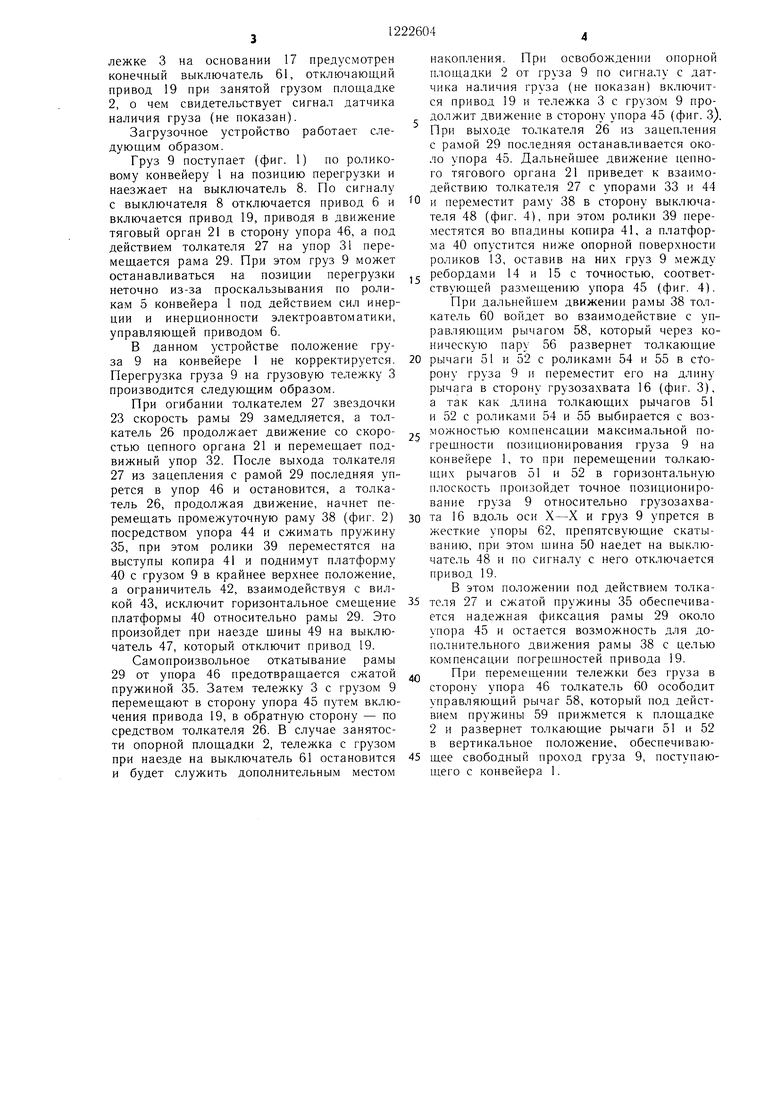
накопления. При освобождении опорной площадки 2 от груза 9 по сигналу с датчика наличия груза (не показан) включится привод 19 и тележка 3 с грузом 9 продолжит движение в сторону упора 45 (фиг. З). При выходе толкателя 26 из зацепления с рамой 29 последняя останавливается около упора 45. Дальнейщее движение цепного тягового органа 21 приведет к взаимодействию толкателя 27 с упорами 33 и 44 и переместит раму 38 в сторону выключателя 48 (фиг. 4), при этом ролики 39 переместятся во впадины копира 41, а платформа 40 опустится ниже опорной поверхности роликов 13, оставив на них груз 9 между
останавливаться на позиции перегрузки г ребордами 14 и 15 с точностью, соответ- неточно из-за проскальзывания по роли-ствующей размещению упора 45 (фиг. 4).
кам 5 конвейера 1 под действием сил инер-При дальнейше.м движении рамы 38 то,тции и инерционности электроавтоматики,катель 60 войдет во взаимодействие с упуправляющей приводом 6.равляющим рычагом 58, который через коВ данном устройстве положение гру-ническую пару 56 развернет толкаюпд,ие
за 9 на конвейере 1 не корректируется. 20 рычаги 51 и 52 с роликами 54 и 55 в ctoрону груза 9 и переместит его на длину рычага в сторону грузоза.хвата 16 (фиг. 3), а так как длина толкающих рычагов 51 и 52 с роликами 54 и 55 выбирается с воз- катель 26 продолжает движение со скоро- js можностью компенсации максимальной по- стью цепного органа 21 и перемещает под- грешности позиционирования груза 9 на вижный упор 32. После выхода толкателяконвейере 1, то при перемещении толкаю27 из зацепления с рамой 29 последняя уп- щих рычагов 51 и 52 в горизонтальную рется в упор 46 и остановится, а толка- плоскость произойдет точное позициониро- тель 26, продолжая движение, начнет пе-вание груза 9 относительно грузозахваремещать промежуточную раму 38 (фиг. 2) зо та 16 вдоль оси X-X и груз 9 упрется в
жесткие упоры 62, препятсвующие скатыПерегрузка груза 9 на грузовую тележку 3 производится следующим образом.
При огибании толкателем 27 звездочки 23 скорость рамы 29 замедляется, а толпосредством упора 44 и сжимать пружину 35, при этом ролики 39 переместятся на выступы копира 41 и поднимут платформу 40 с грузом 9 в крайнее верхнее положение, а ограничитель 42, взаимодействуя с вилванию, при этом шина 50 наедет на выключатель 48 и по сигналу с него отключается привод 19.
В этом положении под действием толкакой 43, исключит горизонтальное смещение 35 теля 27 и сжатой пружины 35 обеспечива- платформы 40 относительно рамы 29. Это ется надежная фиксация рамы 29 около
упора 45 и остается возможность для д,о- полнительного движения рамы 38 с це, 1ью компенсации погрешностей привода 19. Q При перемещении тележки без груза в сторону упора 46 толкатель 60 осободит управляющий рычаг 58, который под дейстпроизойдет при наезде щины 49 на выключатель 47, который отключит привод 19.
Самопроизвольное откатывание рамы 29 от упора 46 предотвращается сжатой пружиной 35. Затем тележку 3 с грузом 9 перемещают в сторону упора 45 путем включения привода 19, в обратную сторону - повием пружины 59 прижмется к площадке
средством толкателя 26. В случае занятое-2 и развернет толкающие рычаги 51 и 52
ти опорной площадки 2, тележка с грузомв вертикальное положение, обеспечиваюпри наезде на выключатель 61 остановится45 щее свободный проход груза 9, поступаюи будет служить дополнительным местомщего с конвейера 1.
накопления. При освобождении опорной площадки 2 от груза 9 по сигналу с датчика наличия груза (не показан) включится привод 19 и тележка 3 с грузом 9 продолжит движение в сторону упора 45 (фиг. З). При выходе толкателя 26 из зацепления с рамой 29 последняя останавливается около упора 45. Дальнейщее движение цепного тягового органа 21 приведет к взаимодействию толкателя 27 с упорами 33 и 44 и переместит раму 38 в сторону выключателя 48 (фиг. 4), при этом ролики 39 переместятся во впадины копира 41, а платформа 40 опустится ниже опорной поверхности роликов 13, оставив на них груз 9 между
ребордами 14 и 15 с точностью, соответ- ствующей размещению упора 45 (фиг. 4).
g 22
А-А
г 25 f3
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки изделий | 1983 |
|
SU1181968A1 |
| Загрузочное устройство | 1982 |
|
SU1090640A1 |
| Межоперационный склад цилиндричес-КиХ издЕлий | 1979 |
|
SU821327A1 |
| ЛИНИЯ ДЛЯ ВЫРАБОТКИ ХЛЕБОБУЛОЧНЫХ ИЗДЕЛИЙ НА ЛИСТАХ | 1971 |
|
SU424550A1 |
| Устройство для перегрузки грузов на приемные конвейеры | 1988 |
|
SU1655874A1 |
| Механизм управления приводом сбрасывателя штучных изделий с подающего органа | 1985 |
|
SU1414734A1 |
| Устройство для загрузки тележечного конвейера | 1976 |
|
SU659479A1 |
| Устройство для упаковки пакета изделий | 1980 |
|
SU943108A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Устройство для перегрузки изделий | 1980 |
|
SU948817A1 |
56 51 S i S3 52 55
А / /х /
57,
2б
Фиг.З
гп
ш
19iTf
X-
п
С
tRyj
Г 6
Б-В
«J 12
56
SO,
21 23
Составитель Б. Толчанов
Редактор Н. ТупицаТехред И. ВересКорректор В. Бутяга
Заказ 1662/20Тираж 833Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
| Загрузочное устройство | 1980 |
|
SU901190A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Загрузочное устройство | 1982 |
|
SU1090640A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
