СлЭ 00
00
со
10
15
20
25
Изобретение относится к машиност- роению, в частности к устройствам управления оборудованием для обработки давлением.
Целью изобретения является улучшение энергетических показателей и по- вьпиение надежности за счет увеличения точности дозирования энергии ударов. На чертеже представлена функциональная схема системы управления.
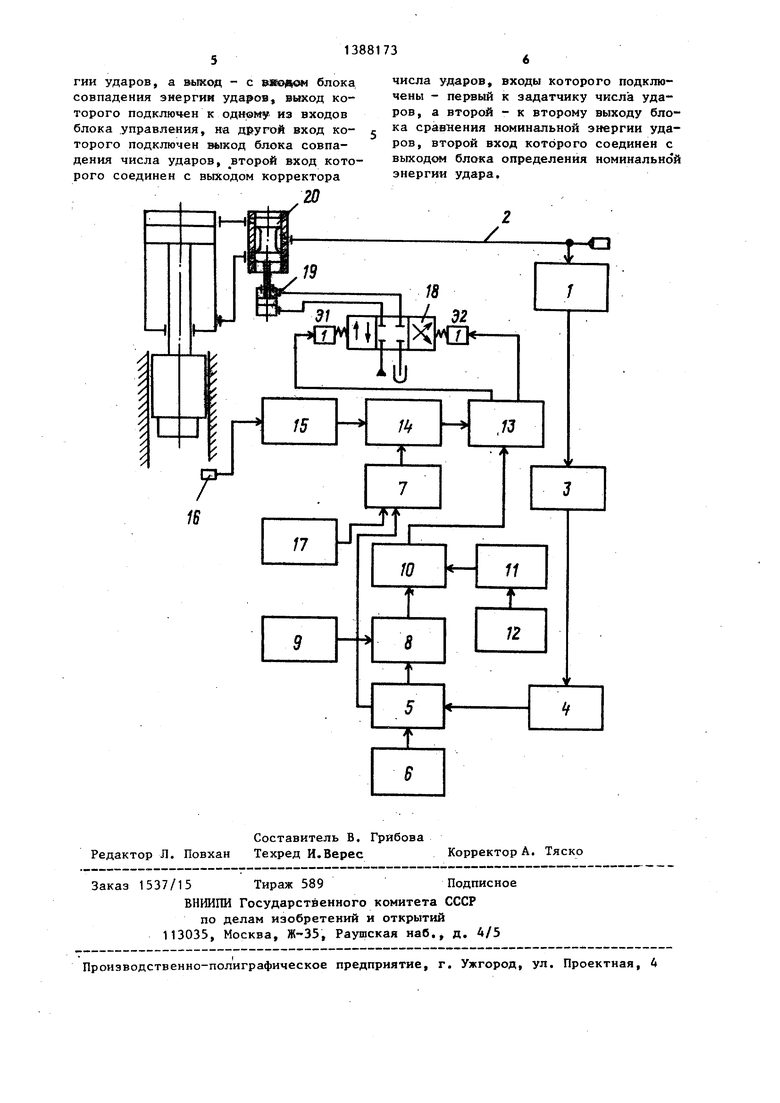
Система состоит из датчиков 1 параметров энергоносителя, подключенных к источнику 2 энергоносителя и соединенных своими выходами с блоком 3 определения параметров энергоносите- ля. Контролируемые параметры, а следовательно количество и ивд датчиков 1 параметров энергоносителя зависят от вида энергоносителя. Для сжатого воздуха - это давление энергоносителя и его температура, для пара, кроме давления и температуры, необходимо контролировать также влажность пара.
Выход блока 3 определения параметров энергоносителя связан с входом блока 4 определения номинальной энергии ударов, выход которого соединён с входом блока 5 сравнения номинальной энергии ударов. Другой вход пос- леднего подключен к выходу задатчи- ка 6 номинальной энергии ударов, а выходы соединены соответственно с входами корректора 7 числа ударов и jj корректора 8 энергии ударов. Другой вход корректора 8 энергии ударов связан с выходом задатчика 9 энергии ударов, а выход - с входом блока 10 совпадения энергии ударов. Другой 40 вход блока 1-0 совпадения энергии ударов подключен к выходу счетчика 11 импульсов, соединенному с генератором 12 импульсов, а выход связан с одним из входов блока 13 управления. Другой вход последнего соединен с выходом блока 14 совпадения числа ударов, связанного со счетчиком 15 числа ударов, вход которого в свою очередь подключен к датчику 16 ходов Причем другой йход блока 14 совпадения числа ударов связан с выходом корректора 7 числа ударов, другой вход которого соединен с выходом за30
5
50
КИМ. Золотник 18 управления связывает управляемые полости цилиндр 19 с источником высокого давления и сливным баком. Поршень цилиндра 19 соос- но соединен штоком с парораспределительным золотником 20.
Система управления работает следующим образом.
В исходном положении баба молота находится в крайнем верхнем положении. Электромагниты Э1 и Э2 золотника 18 обесточены.
Для совершения технологического цикла необходимо задать программу работы молота. С этой целью в задат- чик 9 энергии ударов вводится значение времени включения электромагнита Э2, в задатчик 17 числа ударов - количество ударов с заданным значением времени включения электромагнита Э2, в задатчик 6 номинальной энергии ударов - значение номинальной энергии ударов молота. Значения номинальной энергии ударов, времени включения электромагнита Э2 и число ударов за- даются для нормальных значений параметров энергоносителя. Действительные значения этих параметров в источнике 2 энергоносителя определяются в блоке 3 определения параметров энергоносителя на основании информации, поступающей с датчиков 1 параметров энергоносителя. В блоке 4 определения номинальной энергии ударов хранится информация о значении номинальной энергии ударов для конкретных значений параметров энергоносителя. Та кая информация может быть получена экспериментально или расчетным путем. По значениям параметров энергоносителя, поступающим из блока 3, в блоке 4 определяется значение номинальной энергии ударов в текущий момент времени. Это значение в блоке 5 сравнивается с заданным значением номинальной энергии ударов, поступающим из задатчика 6. В результате сравнения фактического значения номинальной энергии ударов Т., и заданного значения в блоке 5 сравнения номинальной энергии определяется коэффициент корректировки К . По значению коэффициента корректировки, податчика 17 числа ударов. Выходы блока- ступающему из блока 5, в блоке 8 то13 управления связаны соответственно с электромагнитами золотника 18 управления, который может быть выполнен, например, электрогидравличесчняется значение времени включения электромагнита 32, поступившее из задатчика 9 энергии ударов. Каждому интервалу значений коэффициента кор0
5
0
5
j0
0
5
0
КИМ. Золотник 18 управления связывает управляемые полости цилиндр 19 с источником высокого давления и сливным баком. Поршень цилиндра 19 соос- но соединен штоком с парораспределительным золотником 20.
Система управления работает следующим образом.
В исходном положении баба молота находится в крайнем верхнем положении. Электромагниты Э1 и Э2 золотника 18 обесточены.
Для совершения технологического цикла необходимо задать программу работы молота. С этой целью в задат- чик 9 энергии ударов вводится значение времени включения электромагнита Э2, в задатчик 17 числа ударов - количество ударов с заданным значением времени включения электромагнита Э2, в задатчик 6 номинальной энергии ударов - значение номинальной энергии ударов молота. Значения номинальной энергии ударов, времени включения электромагнита Э2 и число ударов за- даются для нормальных значений параметров энергоносителя. Действительные значения этих параметров в источнике 2 энергоносителя определяются в блоке 3 определения параметров энергоносителя на основании информации, поступающей с датчиков 1 параметров энергоносителя. В блоке 4 определения номинальной энергии ударов хранится информация о значении номинальной энергии ударов для конкретных значений параметров энергоносителя. Та кая информация может быть получена экспериментально или расчетным путем. По значениям параметров энергоносителя, поступающим из блока 3, в блоке 4 определяется значение номинальной энергии ударов в текущий момент времени. Это значение в блоке 5 сравнивается с заданным значением номинальной энергии ударов, поступающим из задатчика 6. В результате сравнения фактического значения номинальной энергии ударов Т., и заданного значения в блоке 5 сравнения номинальной энергии определяется коэффициент корректировки К . По значению коэффициента корректировки, по ступающему из блока 5, в блоке 8 точняется значение времени включения электромагнита 32, поступившее из задатчика 9 энергии ударов. Каждому интервалу значений коэффициента корректировки и времени включения электромагнита Э2 соответствует определенное значение коэффициента уточнения, который можно определить экспе- риментально или расчетным путем, хранить в памяти и определять с помощью схем сравнения. Поступившее из задат- чика 9 энергии ударов значение времени включения электромагнита Э2 умно- жается на этот коэффициент уточнения Аналогично на основании коэффициента корректировки и количества ударов с заданным временем включения электромагнита Э2, информация о которых по- ступает соответственно из блока 5 сравнения номинальной энергии ударов и из задатчика 17 числа ударов, в корректоре 7 уточняется число ударов с заданным временем включения элект- ромагнита Э2. Уточненное значение времени включения электромагнита Э2 из корректора 8 поступает на вход блока 10 совпадения энергии ударов, откуда поступает команда в блок 13 управления на начало цикла штамповки. После этого из блока 13 управления подается команда на включение электромагнита Э1 золотника 18 управления. При срабатывании электромагнита Э1 золотник 18 управления соединяет источник высокого давления с поршневой полостью цилиндра 19. Парораспределительный золотник 20, перемещаясь вверх, соединяет источник энергоносителя 2 с поршневой полостью рабочего цилинлра молота. Баба моло- та Начинает разгоняться вниз. Одновременно импульсы с генератора 12 импульсов поступают на вход счетчика 11 числа импульсов, который производит подсчет числа импульсов, и на его выходах (в двоично-десятичном коде) по- является сигнал, соответствующий числу импульсов. При совпадении количест ва импульсов на обоих входах блока 10 с его выхода на вход блока 13 управления поступает сигнал, обеспечиваю-, щий отключение электромагнита Э1 и включение электромагнита Э2 золотника 18 управления. При этом поршневая полость цилиндра 19 соединяется со сливной магистралью, а штоковая полость - с источником высокого давления. Парораспределительный золотник 20 перемещается вниз и соединяет штоковую полость рабочего цилиндра молота с источником 2 энергоносителя. Происходит торможение бабы, деформи
с Q 5 0 5 Q Q с
5
0
5
рование поковки и начало движения бабы вверх до крайнего положения. При достижении бабой положения, соответствующего положению датчика 16 хода, с выхода последнего на вход счетчика 15 числа ударов поступает импульс. С выхода счетчика 15 числа ударов (в двоичном коде) сигнал поступает на вход блока 14. При совпадении сигналов на обоих входах блока 14 с выхода последнего на вход блока 13 управления поступает сигнал, запрещающий прохождение команды на включение электромагнита Э1. При этом цикл ударов с заданной энергией заканчивается и начинается цикл ударов со следующим заданным значением энерт гии ударов. I
Таким образом, достигается повьш1е- ние точности дозирования энергии удара с одновременным автоматическим переходом на работу с различным заданным числом и энергией ударов, что обеспечивает повьш1ение надежности работы молота и его энергетических показателей.
Формула изобр е тения
Система управления штамповочным молотом, содержащая блок управления связанный своими выходами с золотником управления, блок совпадения числа ударов, счетчик числа ударов, соединенный с датчиком ходов, задатчи- ки числа ударов и энергии ударов, блок совпадения энергии ударов, а также соединенные между собой счетчик числа импульсов и генератор импульсов, причем каждый счетчик подключен соответственно к своему блоку совпадения, отличающаяся тем, что, с целью улучшения энергетических показателей и повьш1ения надежности за счет увеличения точности дозирования энергии ударов, она снабжена корректором ударов, соединенными, последовательно датчиками.параметров энергоносителя, блоком определения параметров энергоносителя и блоком определения номинальной энергии ударов, а также соединенными последовательно задатчиком номинальной энергии ударов, блоком сравнения номинальной энергии ударов и корректором энергии ударов, другой вход которого соединен с выходом задатчика энергии ударов, а вькод - с Э1№одом блока, совпадения энергии ударов, выход которого подключен к одному из входов блока управления, на д &угой вход которого подключен выход блока совпадения числа ударов, второй вход которого соединен с выходом корректора
2D
числа ударов, входы которого подключены - первый к задатчику числа ударов, а второй - к второму выходу блока сравнения номинальной энергии ударов, второй вход которого соединен с выходом блока определения номинальной энергии удара.

| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления штамповочным молотом | 1982 |
|
SU1034823A1 |
| Система управления молотом | 1982 |
|
SU1060290A1 |
| Система управления паровоздушным штамповочным молотом | 1985 |
|
SU1310087A1 |
| Устройство управления паровоздушным молотом | 1983 |
|
SU1131584A1 |
| Система управления штамповочным молотом | 1984 |
|
SU1175632A1 |
| Система управления молотом | 1983 |
|
SU1082536A1 |
| Система управления молотом | 1986 |
|
SU1391793A1 |
| Устройство дистанционного управления паровоздушным молотом | 1983 |
|
SU1072970A1 |
| Устройство управления молотом | 1979 |
|
SU822965A1 |
| Система управления гидравлического штамповочного молота | 1975 |
|
SU546419A1 |
Изобретение относится к области машиностроения, з частности к устройствам управления оборудованием для обработки давлением. Целью изобретения является улучшение энергетичес- , ких показателей и повышение надежности, за счет увеличения точности дозирования энергии удара. С этой целью в систему введены блоки определения параметров энергоносителя, номинальной энергии ударов, задания номинальной энергии ударов. Номинальная энергия ударов сравнивается с расчетной и по отклонению корректируется энергия и число ударов. Система управления обеспечивает повьш1енную точность дозирования энергии ударов с одновременным автоматическим переходом с раз- i личным заданным числом и энергией ударов. 1 ил. (Л
| Система управления штамповочным молотом | 1982 |
|
SU1034823A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
