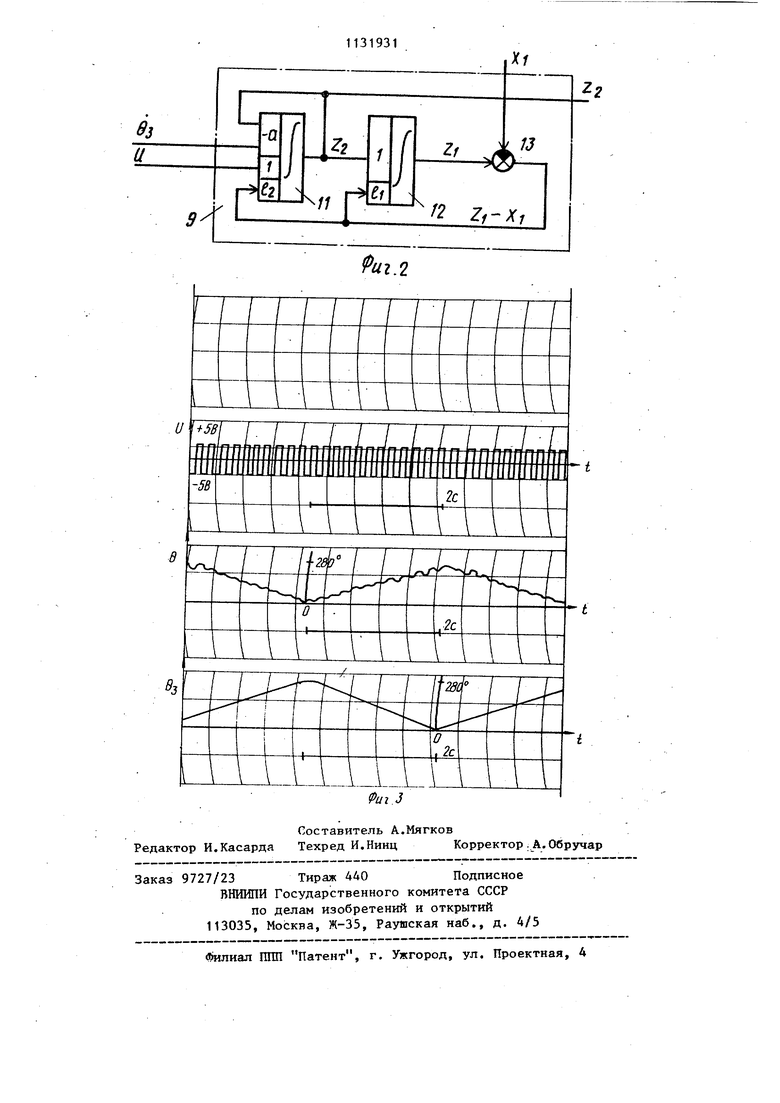
Изобретение относится к легкой промьпаленности и может быть использовано для управления мотальными ме ханизмами. Известно устройство для управления нитераскладчиком мотального механизма, содержащее регулятор с задатчиком положения нитераскладчика, подключенным к первому входу элемента сравнения, связанного вторым входом с датчиком положения нитерас кладчика, а двухфазный асинхронный двигатель привода нитераскладчика с обмоткой управления fl . Недостатком этого устройства является пониженная точность управления нитераскладчиком мотального механизма. Это обусловлено нестабильностью показателей качества переходных процессов регулирования, что вызвано изменением динамических параметров двухфазного асинхронного двигателя в процессе функционирования . 1Цель изобретения - повьшение точ ности управления за счет снижений влияния нестабильности динамических параметров двухфазного асинхронного двигателя. Поставленная цель достигается тем, что в устройстве дпя управления нитераскладчиком мотального механизма, содержащем регулятор с за- датчиком положения нитераскладчика, подключенным к первому входу элемен та сравнения, связанного вторым вхо дом с датчиком положения нитераскла чика, и двухфазный асинхронный двигатель привода нитераскладчика с об моткой управления, регулятор включает задатчик скорости раскладки, сумматор, компаратор, подключенный входом к выходу сумматора, коммутатор, соединенный выходом с обмоткой управления двухфазного асинхронного двигателя, и наблюдатель, связанный первым входом с задатчиком скорости раскладки, вторым входом с выходом элемента сравнения и первым входом сумматора, третьим входом - с выходом компаратора и входо коммутатора, при этом выход наблюда т.еля подключен к второму входу сумматора. Наблюдатель состоит из суммирующих интеграторов и элемента сравнения, причем первый вход первого су мирующего интегратора подключен к 311 задатчику скорости раскладки, второй вход - к выходу компаратора, третий вход - к выходу первого суммирующегр интегратора, первому входу второго суммирукнцего интегратора и второму входу сумматора, а четвертый вход к второму входу второго суммирующего интегратора и выходу элемента сравнения наблюдателя, связанного первым входом с выходом элемента сравнения, а вторым входом - с выходом второго суммирунщего интегратора. На фиг. 1 представлена структурная схема устройства для управления нитераскладчиком мотального механизма} на фиг. 2 - структурная схема наблюдателя; на фиг. 3 - временные диаграммы изменения сигналов между элементами устройства. Устройство для управления нитераскладчиком мотального механизма содержит блок задания, включающий задатчик 1 положения нитераскладчика и задатчик 2 скорости раскладки, первый элемент 3 сравнения, сумматор 4, компаратор 5, коммутатор 6, двухфазный асинхронный двигатель 7 привода нитераскладчика, датчик 8 положения нитераскладчика, наблюдатель 9 и источник 10 питания. Наблюдатель 9 включает суммирующие интеграторы 11 и 12 и второй элемент 13 сравнения. Задатчик 1 положения нитераскладчика и датчик 8 положения нитераскладчика подключены к соответствующим входам первого элемента 3 сравнения, связанного выходом с первыми входами второго элемента 13 сравнения и сумматора 4. Задатчик 2 скорости раскладки соединен с первым входом первого суммирующего интегратора 11, выход которого подключен к его второму входу, первому входу второго суммирующего интег45 /ратора 12 и второму входу сумматора 4, соединенного выходом с входом компаратора 5. Выход компаратора 5 соединен с третьим входом первого суммирующего интегратора 11 и первым входом коммутатора 6, связанного вторым входом с обмоткой возбуждения двухфазного асинхронного двигателя 7 и источником 10 питания, а выходом - с обмоткой управления двухфазного асинхронного двигателя 7. Выход второго суммирующего интегратора 12 подключен к второму входу второго элемента 13 сравнения, соединенного выходом с четвертым входом первого суммирующего интегратора 11 и вторым входом второго суммируюп1его интегратора 12 Устройство работает следующим образом. Сигнап по положению нитераскладчика, вьфабатываемьй задатчиком 1 положения нитераскладчика, сравни:вается с текущим значением положени поступатогчим с датчика 8, в элементе 3 сравнения. Сигнал рассогласования и сигнал, пропорциональный первой производной по времени от этого сиг нала рассогласования, вырабатываемый наблюдателем 9, суммируются в сумматоре 4. В зависимости от знака .сигнала на выходе сумматора 4 изменя ется знак напряжения питания, пода ваемого на обмотку управления двигателя 7 от источника 10 питания. Переключение осуществляется коммута тором 6. Управление двигателем 7 осуществляется с целью сведения к нулю рассогласования заданного и текущего положений нитераскладчика. Устройство реализует следующий алгоритм управления. Уравнение движения двигателя 7 имеет вид g -a0-t-KU-Mc эм/аи -ЭМ/дв -3 где М - вращающий момент на валу двигателя} MC момент сопротивления на ва лу двигателя, ви0 - положение и угловая частот вращения двигателя; и - действующее значение напря жения на обмотках} f - приведенньй момент инерции на валу двигателя. Коэффициенты а и к вычислены в области рабочей точки на механических характеристиках двигателя 7. Уравнение (1) может быть,преобразо вано следующим образом X,-X2,Xi -dX2+KU-d©i-i-e3-Mt (2) где X, 9 - вз , Xj QI 05 3 задание по положению нитераскладчика и первая и вторая производные от этой величины по времени. Для обеспечения высокого качества управления нитераскладчиком в устройстве используется скользящий режим. Алгоритм управления имеет вид U N oSitii&hS, S CoXi4Xz , (3) где HO, Со - постоянные величины. Движение в скользящем режиме описьтается уравнением CoXj + Хг 0. Произвольно выбираемая величпн.а Со определяет темп затухания Xj(t). Уравнение скольжения, а следовательно, и движение Р скользящем режиме не зависят от параметров Q. и К двигателя и возму1чений - MC, 65 3 Таким образом, достигается высокЗе качество управления нитераскладчиком. Величина, пропорциональная Xi , восстанавливается наблюдателем 9. Применение в системе наблюдателя позволяет асиьштотически точно с произвольно выбираемым темпом зату54ания ошибки восстановить вел:1чину Хг, что исключает динамическую ошибку при использовании вместо наблюдателя дифференциатора и тем самым сохраняет идеальный скользящий режим. Таким образом , J Обмотка управления двигателя 7 коммутируется коммутатором 6 к выходу источника 10 питания таким образом, что полярность действующего напряжения на обмотке управления определяется знаком величины S , поступающей на первый вход комьтутатора 6. Действующее значение напряжения, поступающего на обмотку управления (фиг. 3), пропорционально Мо. Сигналы задания 0з и с выхода датчика положения Q показаны на фиг, 3 в противофазе. Сигнал U представляет собой среднее напряжение на обмотке управления. Технико-экономический эффект от . применения предлагаемого изобретения обеспечивается повышением точности управления нитераскладчиком мотального механизма.
иг.1

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| Устройство для управления двигателем двойного питания | 2016 |
|
RU2625720C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2011 |
|
RU2477562C1 |
| Устройство для управления двухфазным асинхронным электродвигателем | 1983 |
|
SU1089747A1 |
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором, и устройство для его осуществления | 1987 |
|
SU1610589A2 |
| Частотно-регулируемый электропривод | 1982 |
|
SU1023606A1 |
| Вентильный электропривод | 1986 |
|
SU1319221A1 |
| Устройство для управления раскладчиком мотального механизма | 1982 |
|
SU1074790A1 |
| Электропривод переменного тока | 1987 |
|
SU1432711A1 |
| Асинхронный электропривод | 1989 |
|
SU1617611A1 |
1. УСТРОЙСТВО /ЩЯ УПРАВЛЕНИЯ НИТЕРАСКЛАЛЧИКОМ МОТАЛЬНОГО МЕХАНИЗМА, содержащее регулятор с задатчиком положения нитераскладчика, подключенным к первому входу элемента сравнения, связ.анного вторым входом с датчиком положения нитераскладчика, и двухфазный асинхронный двигатель.привода нитераскладчика с обмоткой управления, о т л и чаюр(ееся тем, что, с целью повьшения точности управления за счет снижения влияния нестабильности динамических параметров двухфазного асинхронного двигателя, регулятор включает задатчик скорости раскладки, сумматор, комиаратор,подключенный входом к выходу сумматора, коммутатор, соединенный выходом с обмоткой управления двухфазного асинхронного двигателя, и наблюдатель, связанный первым входом с задатчиком скорости раскладки, вторым входом - с .выходом элемента сравнения и первым входом сумматора, третьим входом - с выходом компаратора и входом коммутатора, при этом выход наблюдателя подключен к второму входу сумматора. 2. Устройство по п. 1, отличающееся тем, что наблюдатель состоит из суммирующих интеграторов и элемента сравнения, причем (Л первьм вход первого суммируюпего интегратора подключен к задатчику скорости раскладки, второй вход - к выходу компаратора, третий вход - к выходу первого суммирующего интегратора, первому входу второго суммирующего, интегратора и второму входу сумматора, а четвертый вход - к втосо рому входу второго суммирующего интегратора и выходу элемента сравнения наблюдателя, связанного первым оо входом с выходом элемента сравнения, а вторым входом - с выходом второго суммирующего интегратора..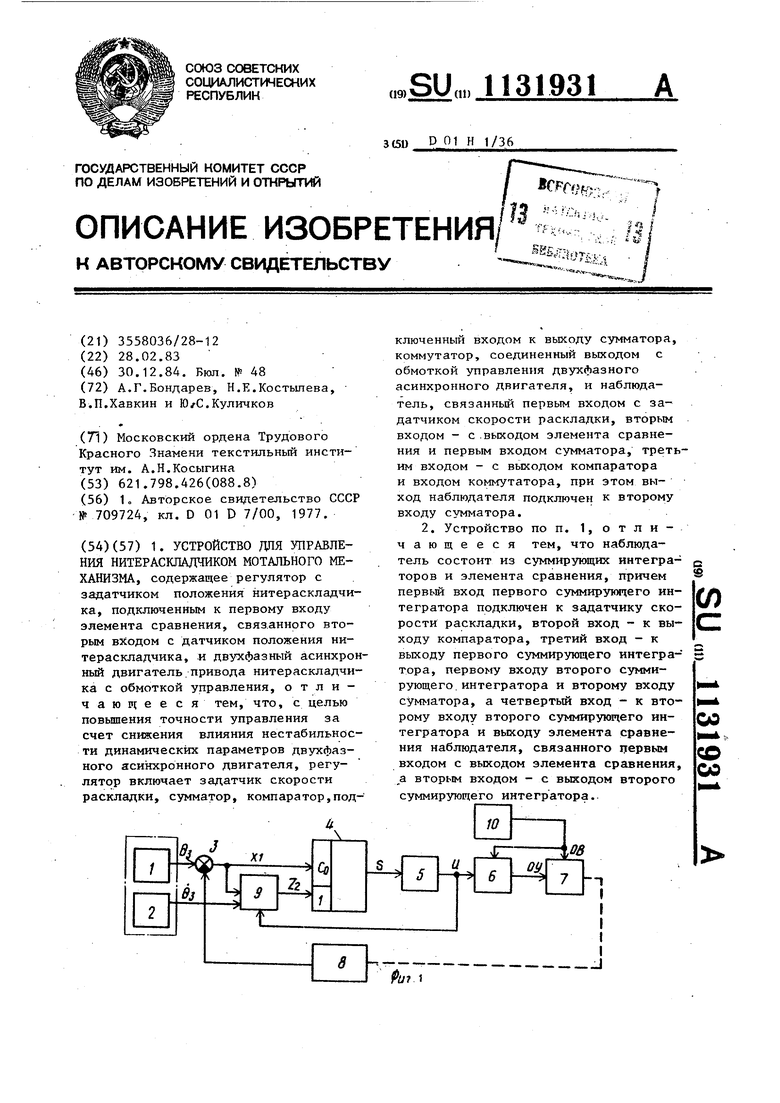
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
