со
4
4;
А
00
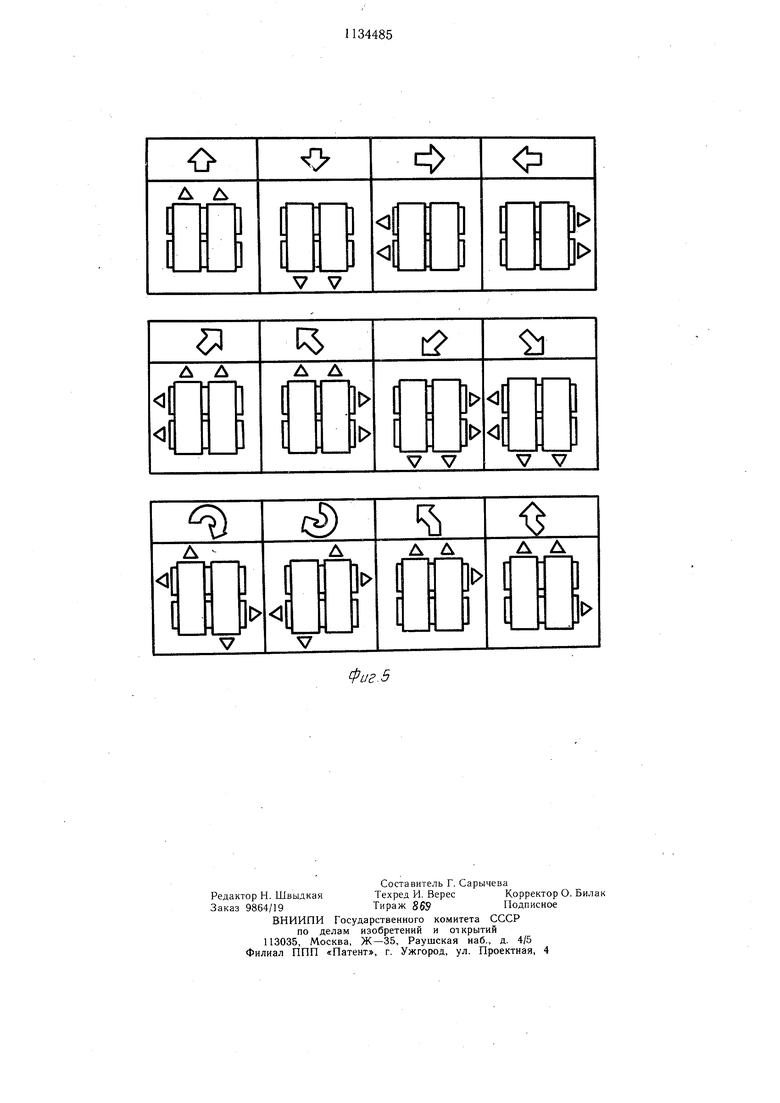
сд Изобретение относится к механизации, и автоматизации подъемно-транспортного оборудования, в частности к устройствам для перемещения грузов, имеющих плоскую ниж i нюю поверхность. Известно устройство для перемещения грузов, содержащее щаровые опоры и приводной тяговый орган, в ячейках которого размещены шаровые опоры 1. Известное устройство обеспечивает перемещение грузов только в одном направлеИзвестно также устройство для перемещения грузов, содержащее раму, смонтированный на ней приводной тяговый орган,-установленный с возможностью перемещения в перпендикулярном направлении относительно направления перемещения тягового органа приводной замкнутый тяговый грузоопорный орган и щаровые опоры, размещенные в ячейках упомянутого тягового органа с возможностью опирания на грузоопорный орган 2. Недостатком известного устройства является больщая энергоемкость в связи с тем, что тяговый орган выполнен дискретным и возникает необходимость в креплении щаров с натягом, что требует дополнительных энергозатрат на перемещение шаров для передачи груза в перпендикулярном направленииЦелью изобретения является снижение энергоемкости. Это достигается тем, что в устройстве для перемещения грузов, содержащем раму, смонтированные на ней приводной тяговый орган, установленный с возможностью перемещения в перпендикулярном направлении относительно направления перемещения тягового органа приводной гибкий замкнутый грузоопорный орган и щаровые опоры, размещенные в ячейках тягового органа с возможностью опирания на грузоопорный орган, тяговый орган, в котором размещены шары, выполнен в виде замкнутого гибкого элемента, при этом грузоопорный орган размещен под верхней ветвью тягового органа и опирается на плоские опорные направляющие. Кроме того, устройство снабжено размещенным параллельно тяговому органу дополнительным тяговым органом и размещенным параллельно грузоопорному органу - дополнительным грузоопорным органом, при этом верхние поверхности каждой пары упомянутых органов расположены в одной горизонтальной плоскости. При этом опорные направляющие выполнены с антифрикционной верхней поверхностью. На фиг. 1 изображено устройство для перемещения грузов, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 3; на фиг. 5 - часть возможных траекторий перемещений листа на устройстве. Устройство для перемещения грузов состоит из рамы 1 и размещенных на ней продольных конвейеров 2 и 3, параллельных друг другу. Внутри продольных конвейеров 2 и 3 и перпендикулярно к ним размеЩ ны параллельные друг другу поперечные конвейеры 4 и 5. Каждый конвейер снабжен индивидуальным приводом (не показан). В тяговых органах 6 и 7 продольных конвейеров 2 и 3 равномерно размещены опорные щары 8, опирающиеся на тяговые органы 9 и 10 поперечных конвейеров 4 и 5. Под тяговыми органами 9 и 10 установлены жесткие пластины 11, изготовленные из материала с низким коэффициентом трения. На опорные щары 8 укладывается груз 12. Пара продольных конвейеров 2 и 3 размещена в одной плоскости, а пара поперечных конвейеров 4 и 5 - в другой плоскости, и эти плоскости параллельны. Устройство работает следующим обраПри включении приводов продольных конвейеров 2 и 3 их тяговые органы 6 и 7 вместе с закрепленными в них опорными щарами 8 начинают перемещаться. При этом опорные шары 8 вращаются от взаимодействия с неподвижными тяговыми органами 9 и 10 поперечных конвейеров 4 и 5, перемещая груз 12 в направлении движения тяговых органов 6 и 7. При включении приводов поперечных конвейеров 4 и 5 начинают перемещаться тяговые органы 9 и 10; при неподвижных тяговых органах 6 и 7 продольных конвейеров 2 и 3 начинают вращаться опорные шары 8. При этом груз 12 перемещается в направлении, противоположном направлению движения тяговых органов 9 и 10 и со скоростью, равной скорости кбнвейеров 4 и 5. Для того, чтобы скорость перемещения груза 12 была все время постоянной, скорость конвейеров 4 и 5 должна быть в два раз-а больще, чем скорости конвейеров 2 и 3. При включении приводов продольных 2 и 3 и поперечных 4 и 5 конвейеров одновременно осуществляются сложные перемещения груза 12, например вращение на месте Оно получается при сложении векторов скоростеи движущихся в определенном направлении тяговых органов 6, 7, 9 и 10 конвейеров 2, 3, 4 и 5. Результатом сложения векторов движущихся конвейеров является направление вращения опорных щаров 8. Поскольку каждый продольный конвейер 2 и 3 посредством своих опорных шаров 8 взаимодействует с двумя тяговыми органами 9 и 10 поперечных конвейеров 4 и 5, то результирующие векторы скоростей вращения опорных щаров 8 повернуты под углом 45° к направлению движения любого конвейера, а между собой они составляют угол 90°. Например, при движении продольных конвейера 2 влево (фиг. 5), конвейера 3 - вправо, а поперечных конвейера 4 - вниз, конвейера 5 - вверх возникает вращение груза 12 по часовой стрелке. Меняя направление движения конвейеров и регулируя их скорость, можно получить любую траекторию перемещения груза. .ь f йЛ;..™..,.,,.-,,ж,,ж-,i / 7 8 фи Использование устройства для грузов с плоским основанием значительно расширяет технологические возможности. Грузы можно перемещать вперед, назад, вправо, влево, поворачивать на месте на любой угол, перемещать под любцм углом и по сложной траектории. Устройство, вмонтированное в конвейерную линию, может производить сортировку грузов. Изобретение позволяет снизить энергоемкость за счет свободного размещения щаров в ячейках тягового органа. jju ibAdj a .--.-.-i..-..-.ж.iS«i 0 9 . 2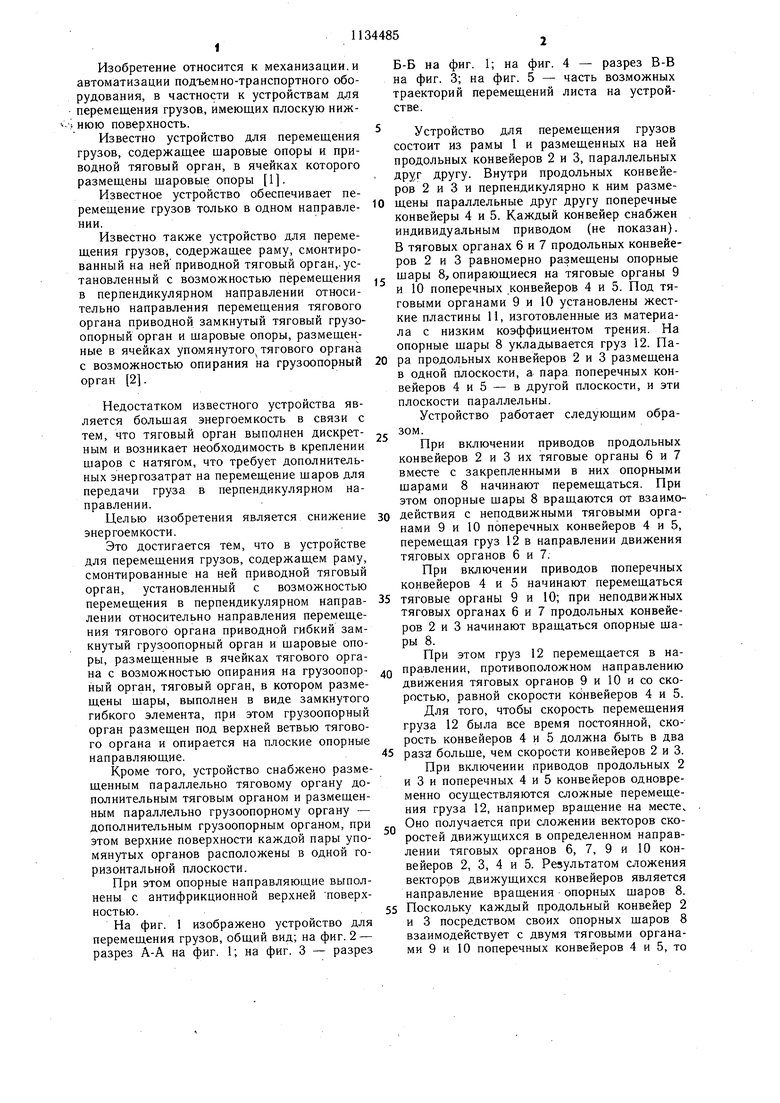

| название | год | авторы | номер документа |
|---|---|---|---|
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2008 |
|
RU2356813C1 |
| Тележечный конвейер | 1985 |
|
SU1261858A1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2008 |
|
RU2356812C1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ЛЕНТОЧНОГО КОНВЕЙЕРА | 2011 |
|
RU2472690C1 |
| КРУТОНАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2011 |
|
RU2478549C1 |
| ПЛАСТИНЧАТЫЙ КОНВЕЙЕР | 2004 |
|
RU2270150C1 |
| Полочный элеватор | 1988 |
|
SU1565787A1 |
| Подвесной ленточный конвейер Д.Я.Полищука | 1976 |
|
SU988679A1 |
| Перегрузочное устройство для стеллажных складов | 1983 |
|
SU1146240A1 |
| ЛЕНТОЧНО-КАНАТНЫЙ КОНВЕЙЕР | 2010 |
|
RU2424969C1 |
1. УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ, содержащее раму, с.монтированные на ней приводной тяговый орган, установленный с возможностью перемещения в перпендикулярном направлении относительно направления перемещения тягового органа приводной гибкий замкнутый грузоопорный орган и шаровые опоры, размещенные в ячейках тягового органа с возможностью опирания на грузоопорный орган, (уличающееся тем, что, с целью снижения энергоемкости, тяговый орган, в котором размещены щары, выполнен в виде замкнутого гибкого элемента, при этом грузоопорный орган размещен под верхней ветвью тягового органа и опирается на плоские опорные направляющие. 2.Устройство по п. 1, отличающееся тем, что оно снабжено размеш,енным параллельно тяговому органу дополнительным тяговым органом и размещенным параллельно грузоопорному органу дополнительным грузопорным органом, при этом верхние поверхности каждой пары упомянутых органов расположены в одной горизонтальной плоскости. 3.Устройство по п. 1, отличающееся , % что опорные направляющие выполнены с антифрикционной верхней поверхностью. (Л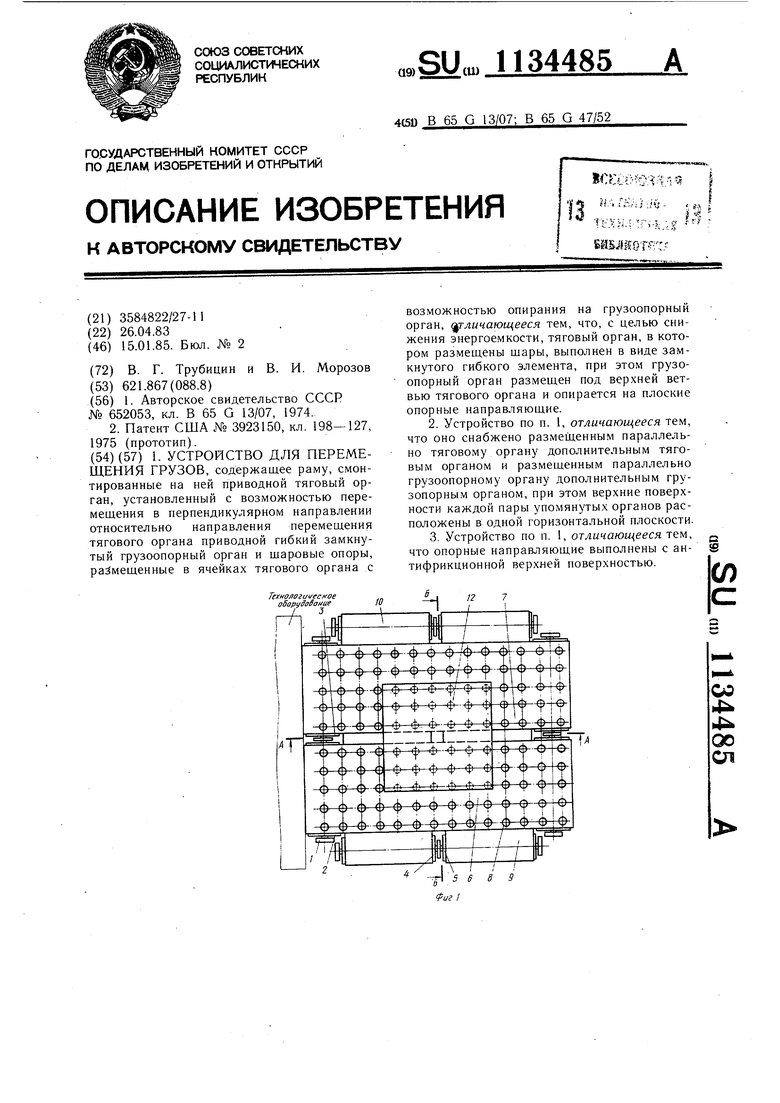
Фиг.З
В-В
Фиг.В
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Конвейер для штучных грузов | 1974 |
|
SU652053A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 3923150, кл | |||
| Складная решетчатая мачта | 1919 |
|
SU198A1 |
