Изобретение относится к силоизмерительной технике, а именно к средствам измерения пространственного вектора силы и может найти применение в машиностроительной промышленности, например, для измерения пространственного вектора импеданса рук оператора
Известен динамометр, включаюший корпус, внутри которого закреплены попарно по двум взаимно перпендикулярным осям упругие элементы с датчиками из деформации 1.
Однако устройство не обеспечивает измерения силы по трем взаимно перпендикулярным направлениям и необходимой точности измерения.
Наиболее близким по технической суш,ности и достигаемому результату к предлагаемому является устройство, содержашее цилиндрический корпус с крышкой, опорный кронштейн, сферический упор, жестко связанный кронштейном при помощи тяги, упругие рессоры, установленные симметрично упору попарно по трем взаимно перпендикулярным координатным осям, одна из которых совпадает с осью корпуса, элементы крепления упругих рессор к корпусу и датчики деформаций упругих рессор 2.
Известное устройство не обеспечивает достаточную точность измерения вследствие того, что резонансные состояния корпуса датчика на повышенных частотах приводят к периодическим изменениям положения точек крепления упругих рессор к корпусу датчика, амплитуды которых зависят от форм и частот колебаний.
Цель изобретения - повышение точности регистрации проекций силы по координатным осям и надёжности устройства.
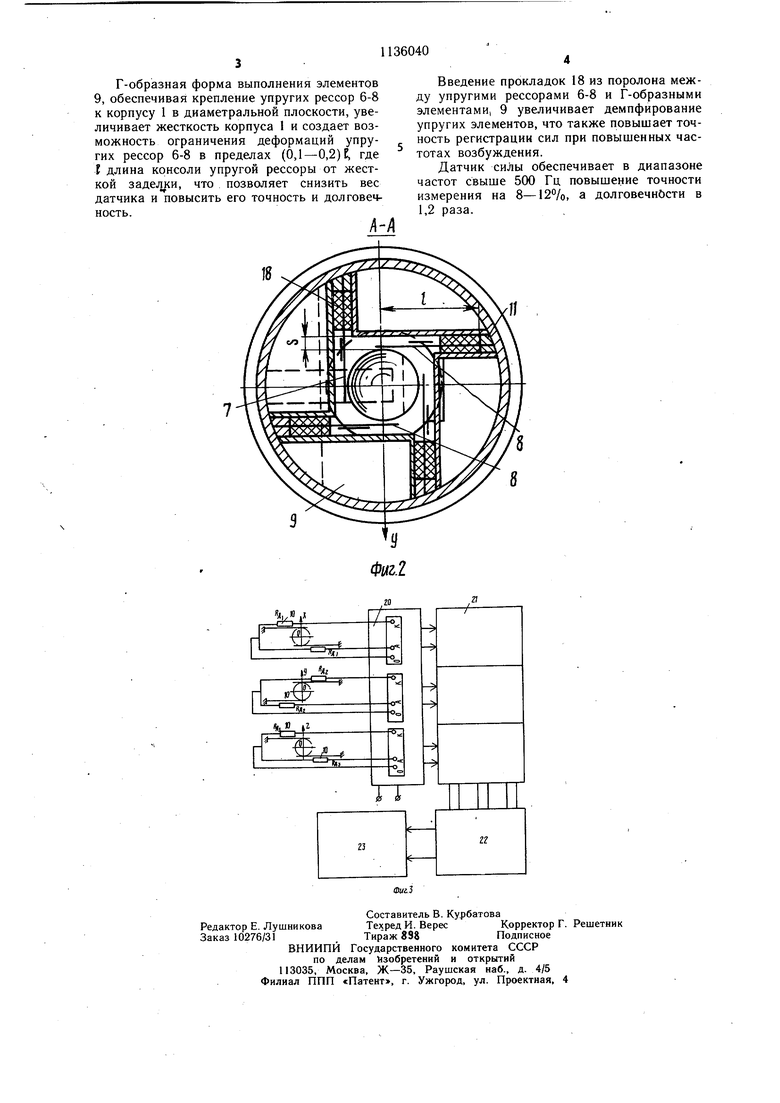
Поставленная цель достигается тем, что в датчике силы, содержащем цилиндрический корпус с крышкой, сферический упор, жестко связанный через тягу с опорным кронштейном и упругие элементы с тензодатчиками и с элементами крепления, установленные симметрично упору попарно по трем взаимноперпендикулярньш осям, достигается тем, что элементы крепления упругих элементов расположены в диаметральной плоскости, проходяшей через центр сферического упора, и выполнены в виде четырех Гобразных кронштейнов с образованием крестообразной риспоркн корпуса, при этом большие стороны кронштейнов обрашены к сферическому упору и расположены от него на расстоянии, равном 0,1-0,2 длины консоли упругого элемента от жесткой заделки. На фиг. 1 изображен датчик силы, продольный разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - схема соединения аппаратуры при измерении силы.
Датчик силы включает корпус 1 с крышкой 2, опорный кронштейн 3, сферический упор 4, жестко связанный с кронштейном. 3
при помощи тяги 5, упругие элементы 6-8 Например, упругие рессоры)элементы 9 крепления упругих рессор к корпусу I и датчики 10 деформаций упругих рессор 6-8.
Каждая из упругих рессор 6-8 размещена в пазу сухарей 11 и жестко закреплена между элементами 9, выполненными Г-образными, и сеторами 12 и 13, жестко соединенными с корпусом 1. Между корпусом 1 и опорньш кронштейном 3 установлена защитная гофрированная коническая мембрана из эластичного материала, которая поджата к корпусу 1 кольцом 14 и винтами 15, а через кронштейн 3 винтом 16 с опорой 17. Упругие рессоры 6-8 с наклеенными на
5 них тензометрическими датчиками 10 расположены симметрично и попарно относительно упора 4 по взаимно перпендикулярным осям ОХ, ОУ, OZ, так что плоскости расположения упругих рессор 6-8 отстоят от центра упора 4 на одинаковом расстоянии. Ось
0 001 тяги 5 опорного кронштейна 3 лежит в диагональной плоскости куба, образованного плоскостями упругих рессор 6-8. Между Г-образными элементами 9 и упругими рессорами 6-8 расположены прокладки 18 из
5 пористого демпфирующего материала, например, поролона. Корпус 1 с помощью шпильки 19 жестко крепится к объекту, причем ось крепления совпадает с осью симметрии OZ.
Схема соединения аппаратуры включает
0 тензоусилитель 20 марки ТА-5, фильтр 21 типа OF-101, коммутатор 22 и регистрирующий прибор 23.
Тензометрические датчики 10 активного сопротивления каждой пары упругих рессор 6-8 соединены в одно плечо измерительного полумоста, во второе плечо которого подключается компенсационное сопротивлеление тензоусилителя.
,Датчик силы опорой 17 крепится к основанию (не показано), а корпус 1 шпилькой 19 жестко соединяется с объектом. При перемещении объекта и связанного с ним корпуса 1 под действием внешних усилий упругие рессоры 6-8, воздействуя на упор 4, деформируются, что вызывает изменение сопротивления наклеенных на них тензодатчиков 10. Расположение каждой пары упругих рессор 6-8 в параллельных плоскостях и симметрично относительно упора 4 позволяет переключением коммутатора 22 фиксировать величину проекции силы в направлении каждой из осей ОХ, ОУ,OZ независимо друг от друга. Модуль суммарного вектора силы и его положение относительно координатных осей X, У, Z определяется по найденным проекциям. Выполнение упора 4 сферической формы позволяет устранить
5 влияние на показания прибора моментов сил, действующих относительно любой оси, проходящей через точку О и повысить точность измерения.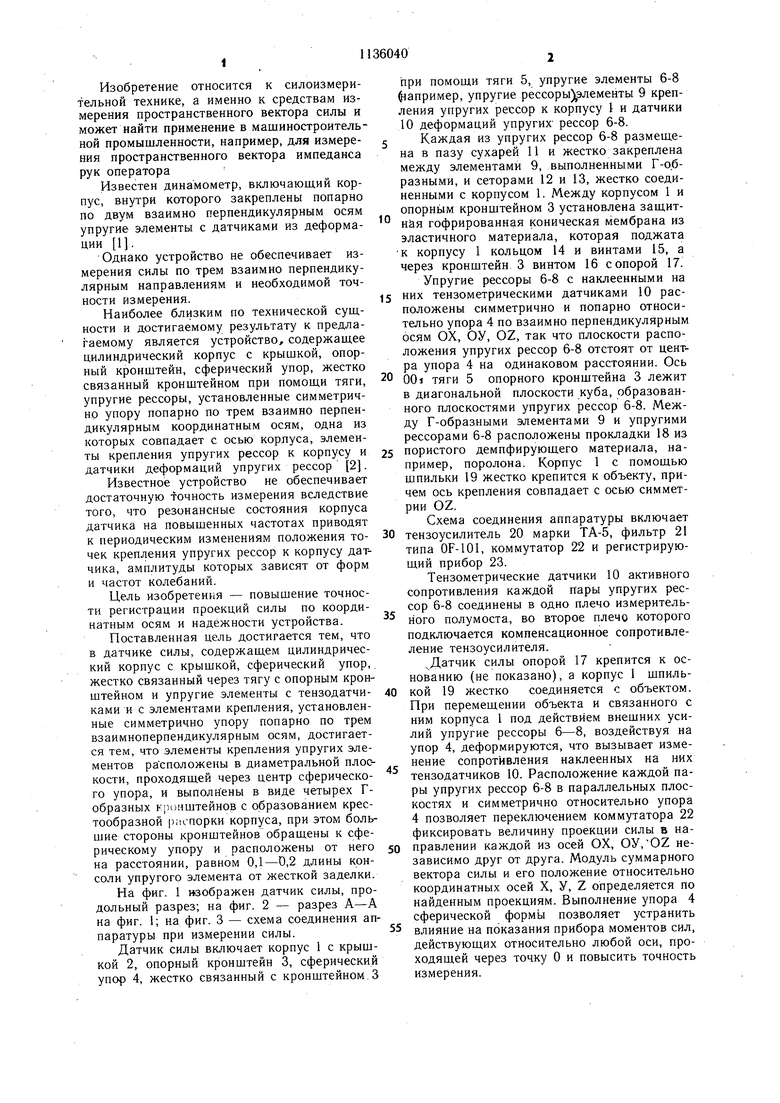
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик скорости и направления движения твердых частиц | 1980 |
|
SU998957A1 |
| Способ и устройство для испытания стрелкового оружия и/или стендовых испытаний ракетных двигателей | 2023 |
|
RU2799168C1 |
| СПОСОБ ДВУХКАНАЛЬНОГО УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ ОБЪЕКТОВ С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ ПРОСТРАНСТВЕННОГО ДВИЖЕНИЯ | 2016 |
|
RU2629922C1 |
| Амортизированный гравиметр | 2022 |
|
RU2792153C1 |
| МАНИПУЛЯТОР-ПЛАТФОРМА | 1995 |
|
RU2093344C1 |
| СИСТЕМА ИНДИКАТОРОВ БЕЗОПАСНОСТИ ДЛЯ ПРЕДОТВРАЩЕНИЯ ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЙ ВЗРЫВНОГО ХАРАКТЕРА | 2016 |
|
RU2625825C1 |
| Устройство для измерения моментов сопротивления вращению шарико-подшипников | 1973 |
|
SU494634A1 |
| СПОСОБ И УСТРОЙСТВА ДЛЯ ИСПЫТАНИЯ СТРЕЛКОВОГО ОРУЖИЯ И/ИЛИ СТЕНДОВЫХ ИСПЫТАНИЙ РАКЕТНЫХ ДВИГАТЕЛЕЙ | 2022 |
|
RU2790353C1 |
| Способ определения пространственного перемещения режущей пластины инструмента под нагрузкой и устройство для его осуществления | 1985 |
|
SU1284715A1 |
| Устройство для измерения усилий на колесе транспортного средства | 1988 |
|
SU1596223A2 |
СИЛЫ, содержащий цилиндрический корпус с крышкой, сферический упор, жестко связанный через тягу с опорным кронштейном, и упругие элементы с тензодатчиками и элементами крепления, установленные симметрично упору попарно по трем взаимно перпендикулярным осям, отличающийся тем, что, с целью-повышення точности и надежности путем обеспечения жесткости корпуса и возможности ограничения деформации упругих элементов, элементы крепления упругих элементов распо.тожены в диаметральной плоскости, проходяш,ей через центр сферического упора, и выполнены в виде чеУырех Г-образных кронштейнов с образованием крестообразной распорки корпуса, при этом большие стороны кронштейнов обращены к сферическому упору и расположены от него на расстоянии, равном 0,1-0,2 длины консоли упругого элемента от жесткой заделки. СП J. О5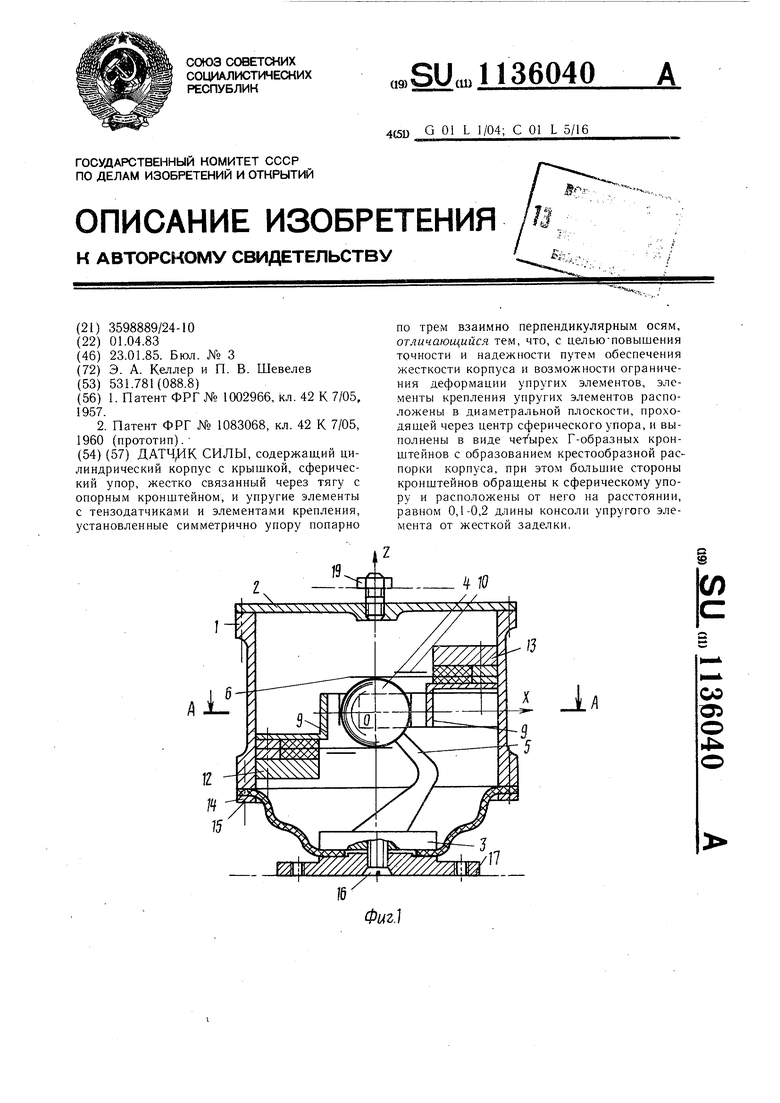
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения скорости потока и расхода жидких и газообразных сред | 1978 |
|
SU1002966A1 |
| Устройство для усиления микрофонного тока с применением самоиндукции | 1920 |
|
SU42A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ изготовления теплоаккумулирующего элемента теплообменника | 1983 |
|
SU1083068A1 |
| Устройство для усиления микрофонного тока с применением самоиндукции | 1920 |
|
SU42A1 |
