эо
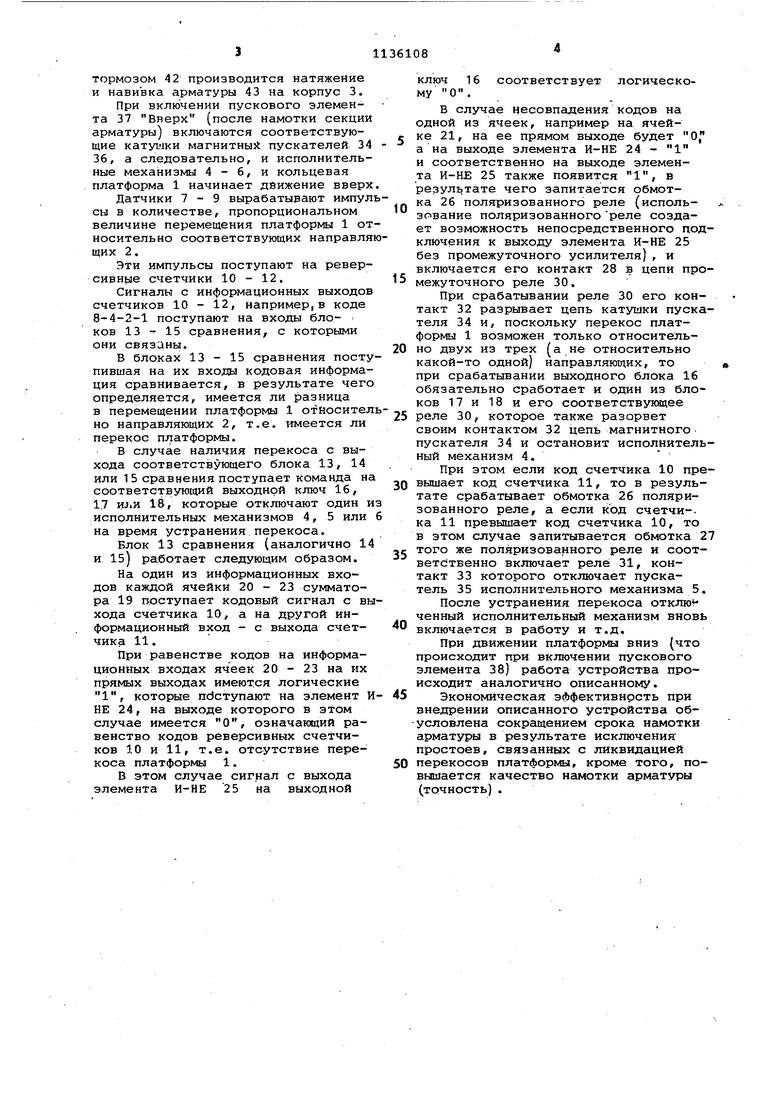
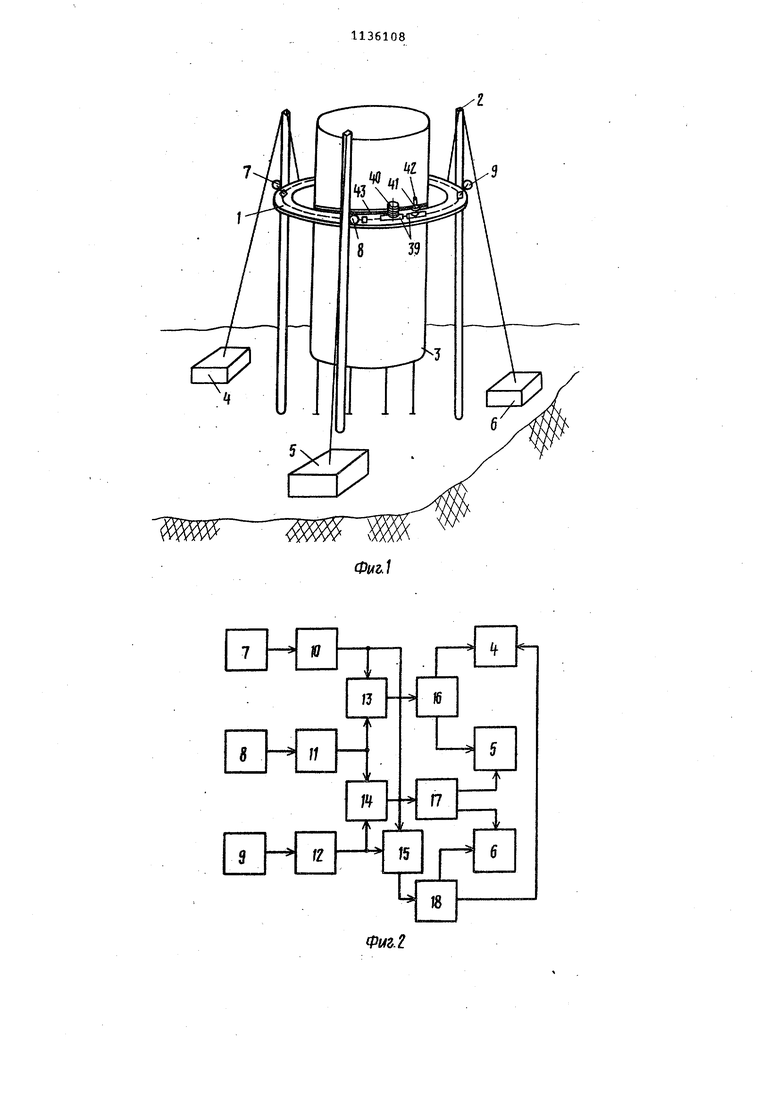
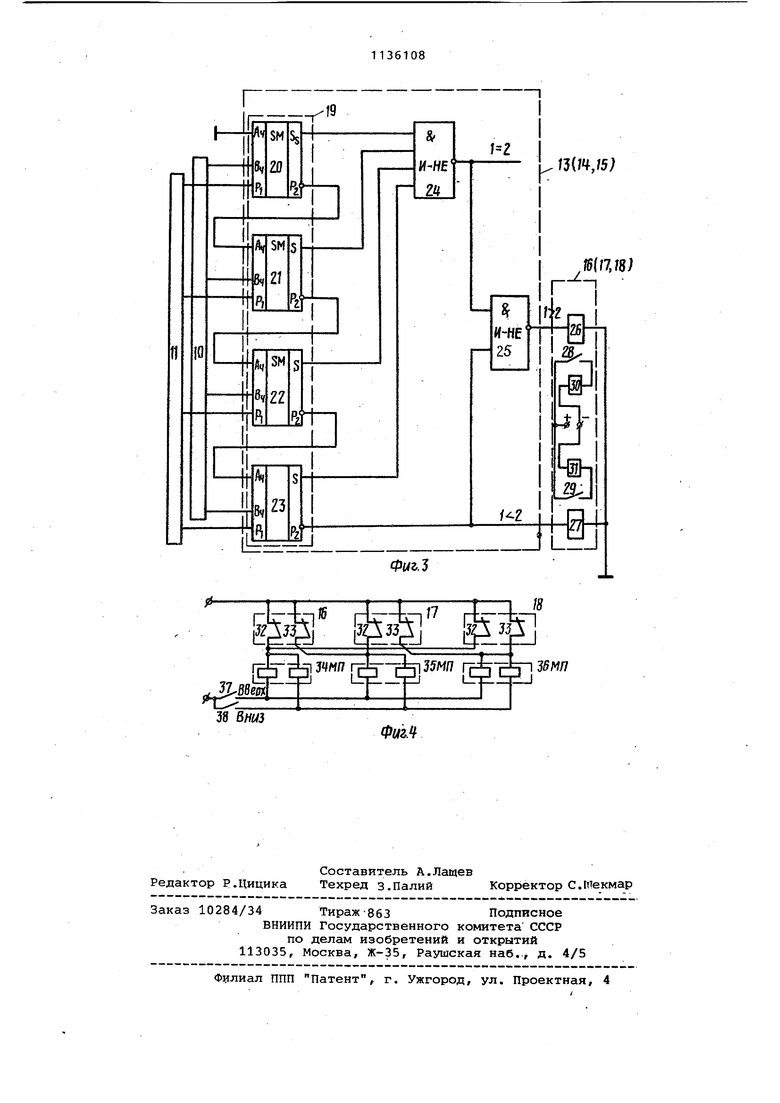
Изобретение отнорится к автоматике, в частности к устройствам для регулирования положения. . Наиболее близким техническим решением к изобретению является устро ство для регулирования положения, содержащее датчики .положения, блокч сравнения, ключи, реверсивные счетчики и исполнительные механизмы IJ Недостатком известного устройства является его низкая точность. Цель изобретения - повышение точ ности устройства. Цель достигается тем, что в устройстве, содержащем датчики положе.ния, блоки сравнения, ключи, реверсивные счетчики и исполнительные ме ханизмы, выход первого датчика поло жения через первый реверсивный счет чик соединен с первьй и входами первого и второго блоков сравнения, выход второго датчика положения че рез второй реверсивный счетчик соединен с вторым входом первого блока сравнения и первым входом третьего блока сравнения, выход третьего дат чика положения через третий реверсивный счетчик соединен с вторыми входами второго и третьего блоков сравнения, выход первого блока срав нения через первый ключ соединен с первыми входами первого и второго и полнительных механизмов, выход второго блока сравнения соединен через второй ключ с первым входом третьего исполнительного механизма-, и вторым входом второго исполнительного механизма, а выход третьего блока срав нения через третий ключ соединен с вторыми входами первого и второго ис полнительных механизмов. Кроме того, блок сравнения содержит последовательно соединенные алгебраический сумматор, первый элемент И-НЕ и второй элемент И-НЕ, выkoд второго элемента И-НЕ и второй выход алгебраического сумматора обpa3ytoT векторный выход блока сравнения, первый векторный вход которого образуют одни входы алгебраического сумматора, а второй векторный вход - вторые входы алгебраического сумматора, второй выход которого сое динен с вторым входом первого элемента И-НЕ. Работа регулятора положения рассматривается на примере регулирования положения платформы арметурнонавивочной машины. На фигЛ показана схема расположения механизмов и аппаратуры подъема платформы арматурно-навивочной машины , на фиг.2 -.структурная блоксхема устройства для регулирования подъема платформыj на фиг.З - вариант выполнения блока сравненияJ на фиг.4 - вариант выполнения блока управления исполнительным механизмом. Кольцевая платформа 1 установлена на направляющих 2 с возможностью j перемещения пО ним вдоль корпуса 3 с помощью исполнительных механизмов 4 - 6, например лебедок. На кольцевой платформе 1 установлены также датчики 7-9 импульсов, фиксирующиеперемещения платформы 1 относительно направляющих 2. Датчики 7 - 9 (Лиг.2) подключены соответственно к реверсивным счетчикам 10 - 12 импульсов. Выходы счетчика 11 подключены к входам блоков 13 и 14 сравнения, выходы счетчика 10 к входам блоков 13 и 15 сравнения, а выходы счетчика 12 соединены с входами блоков 14 и 15 сравнения. Блок 13 сравнения,через выходной ключ 16 связан с исполнительными механизмами 4 и 5, блок 14 сравнения через выходной ключ 17 соединен с исполнительными механизмами 5 и б, а блок 15 сравнения через выходной .ключ 18 - с исполнительными механизмами 4 и б. Каждый из блоков 13-15 сравнения выполнен (вариант выполнения) в виде четырехразрядного алгебраического сумматора 19 (фиг.З) с разрядны и ячейками 20 - 23, четырехвходового элемента И-НЕ 24 и двухвходового элемента И-НЕ 25. В качестве сумматора 19 можно использовать микросхему К 155 ИМ1, для элемента И-НЕ 24 - микросхему К 155 ЛАЗ, а для элемента И-НЕ 25 - микросхему типа К 15 5 ЛА 12. Входы ячеек 20 - 23 сумматора 19 соединены с кодовыми выходами счетчиков 10 и 11 (для блока 13 сравнения) f а выходы подключены к элементу И-НЕ 24. Выход элемента И-НЕ 24 подключен к одному входу элемента И-НЕ 25, другой вход которого соединен с инверсным выходом ячейки 23 старшего разряда сумматора 19. Выход элемента И-НЕ 25 и инверсный выход ячейки 23 подключены к выходному ключу 16. Выходной ключ 16 (Фиг.З и фиг.4) содержит поляризованное реле с двумя обмотками 26 и 27 и контактами 28 и 29 и два промежуточных реле 30 и 31, имеющих соответственно контакты 32 и 33. Исполнительные механиз№л 4-6 приводятся в действие реверсивными магнитными пускателями 34 - 36, включаемыми пусковыми элементами 37 Вверх и 38 Вниз. Устройство работает следующим образом. С помощью установленных на платформе 1 на тележках 39 бабины 40 с арматурой и натяжного шкива 41 с i
тормозом 42 производится натяжение и навивка арматуры 43 на корпус 3.
При включении пускового элемента 37 Вверх (после намотки секции арматуры) включаются соответствующие катуижи магнитный пускателей 34 36, а следовательно, и исполнительные механизмы 4 - 6, и кольцевая платформа 1 начинает движение вверх.
Датчики 7-9 вырабатывают импульсы в количестве, пропорциональном величине перемещения платформы 1 относительно соответствующих направляющих 2.
Эти импульсы поступают на реверсивные счетчики 10-12.
Сигналы с информационных выходов счетчиков 10 - 12, например,в коде 8-4-2-1 поступают на входы блоков 13 - 15 сравнения, с которыми они связаны.
В блоках 13 - 15 сравнения поступившая на их входы кодовая информация сравнивается, в результате чего определяется, имеется ли разница в перемещении платформы 1 отйосительно направляющих 2, т.е. имеется ли перекос платформы.
В случае наличия перекоса с выхода соответствующего блока 13, 14 или 15 сравнения поступает команда на соответствующий выходной ключ 16, 17 или 18, которые отключают один из исполнительных механизмов 4, 5 или 6 на время устранения.перекоса.
Клок 13 сравнения (аналогично 14 и 15) работает следующим образом.
На один из информационных входов каждой ячейки 20 - 23 сумматора 19 поступает кодовый сигнал с выхода счетчика 10, а на другой информационный вход - с выхода счетчика 11.
При равенстве кодов на информационных входах ячеек 20 - 23 на их прямых выходах имеются логические 1, которые пбступают на элемент ИНЕ 24, на выходе которого в этом случае имеется О, означающий равенство кодов реверсивных счетчиков 10 и 11, т.е. отсутствие перекоса платформы 1.
В этом случае сигнал с выхода элемента И-НЕ 25 на выходной
ключ 16 соответствует логическому О.
В случае несовпадения кодов на одной из ячеек, например на ячейке 21, на ее прямом выходе будет О а на выходе элемента И-НЕ 24 - 1 и соответственно на выходе элемента И-НЕ 25 также появится 1, в результате чего эапитается обмотQ ка 26 поляризованного реле (использование поляризованного реле создает возможность непосредственного подключения к выходу элемента И-НЕ 25 без промежуточного усилителя), и включается его контакт 28 в цепи промежуточного реле 30.
При срабатывании реле 30 его контакт 32 разрывает цепь катушки пускателя 34 и, поскольку перекос платформы 1 возможен только относительно двух из трех (а не относительно
какой-то одной) направляющих, то при срабатывании выходного блока 16 обязательно сработает и один из блоков 17 и 18 и его соответствующее
5 реле 30, которое также разорвет
своим контактом 32 цепь магнитного пускателя 34 и остановит исполнительный механизм 4.
При этом если код счетчика 10 превышает код счетчика 11, то в результате срабатывает обмотка 26 поляризованного реле/ а если код счетчи-. ка 11 превышает код счетчика 10, то в этом случае запитывается обмотка 27
5 того же поляризованного реле и соответственно включает реле 31, контакт 33 которого отключает пускатель 35 исполнительного механизма 5.
После устранения перекоса отклю ченный исполнительный механизм вновь
включается в работу и т.д.
При движении платформы вниз (что происходит при включении пускового элемента 38) работа устройства происходит аналогично описанному.
5 Экономическая эффективность при внедрении описанного устройства обусловлена сокращением срока намотки арматуры в результате исключения простоев, связанных с ликвидацией
0 перекосов платформы, кроме того, повышается качество намотки арматуры (точность) .
Г
.9
ШП,15)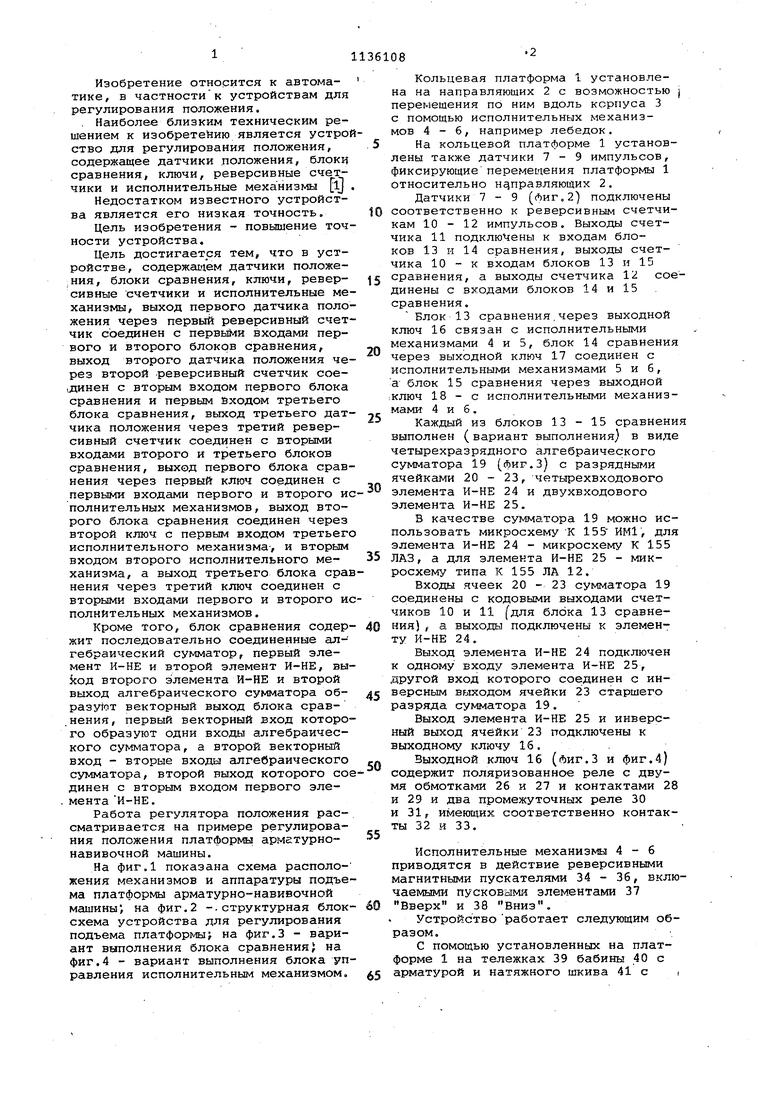
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для адресования транспортного средства | 1987 |
|
SU1618706A1 |
| Система для управления устройством укладки эластичных листов | 1986 |
|
SU1376062A1 |
| ЧАСТОТНО-ФАЗОВОЕ РЕЛЕ | 2003 |
|
RU2237311C1 |
| Устройство для программного управле-Ния Об'ЕКТОМ | 1979 |
|
SU842717A1 |
| Позиционный электропривод | 1990 |
|
SU1778904A1 |
| Устройство для регулирования расхода жидкости | 1981 |
|
SU999025A1 |
| Привод периодической подачи металлорежущих станков | 1983 |
|
SU1126929A1 |
| Цифровая позиционная система | 1981 |
|
SU974341A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1997 |
|
RU2113004C1 |
| Устройство для регулирования температуры | 1984 |
|
SU1188713A1 |
1. УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ,содержащее датчики положения, блоки сравнения, ключи, реверсивные счетчики и исполнитель- ные механизмы, отличающеес я тем, что, с целью повышения точности устройства, в нем выход первого датчика положения через первый реверсивный счетчик соединен с первыми входами первого и второго блоков сравнения, выход второго датчика положения через второй реверсивный счетчик соединен с вторым входом первого блока сравнения и первым входом третьего блока сравнения, выход третьего датчика положения через третий реверсивный счетчик соединен с вторыми входами второго и третьего блоков сравнения, выход первого блока сравнения через первый ключ соединен с первыми входами перйого и второго исполнительных механизмов, выход второго блока сравнения соединен через второй ключ с первым входом третьего исполнительного механизма и вторым входом второго исполнительного механизма, а выход третьего блока сравнения через третий ключ соеди-нен с вторыми входами первого и второго исполнительных механизмов .. 2. Устройство по п. 1, отличающееся тем, что блок сравнения содержит последовательно соединенные алгебраический сумматор, i СО первый элемент И-НЕ и второй элемент И-НЕ, выход второго элемента ИНЕ и второ выход алгебраического сумматора образуют векторный выход блока сравнения, первый векторный вход которого образуют одни входы алгебраического сумматора, а второй векторный вход - вторые входы алгебраического сумматора, второй выход которого соединен с вторым входом СО Olt) первого элемента И-НЕ.
ша18)
-
™ §5зф ,&г
Г ЗЧМ/7п -рЬт15 /7 Г
iz flffeir
38 8ШЗ
J5W/7
.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Пухов Г.Е | |||
| и др | |||
| Синтез многосвязных систем управления | |||
| Киев, Наукова думка, 1966, с | |||
| Способ сужения чугунных изделий | 1922 |
|
SU38A1 |
