1
Изобретение относится к производству резинотехнических изделий и может быть использовано во всех отраслях народного хозяйства для автоматической укладки эластичных листов ,
Цель изобретения - повышение точности укладки листов путем исключения влияния динамических погрешностей исполнительного механизма и приводов,
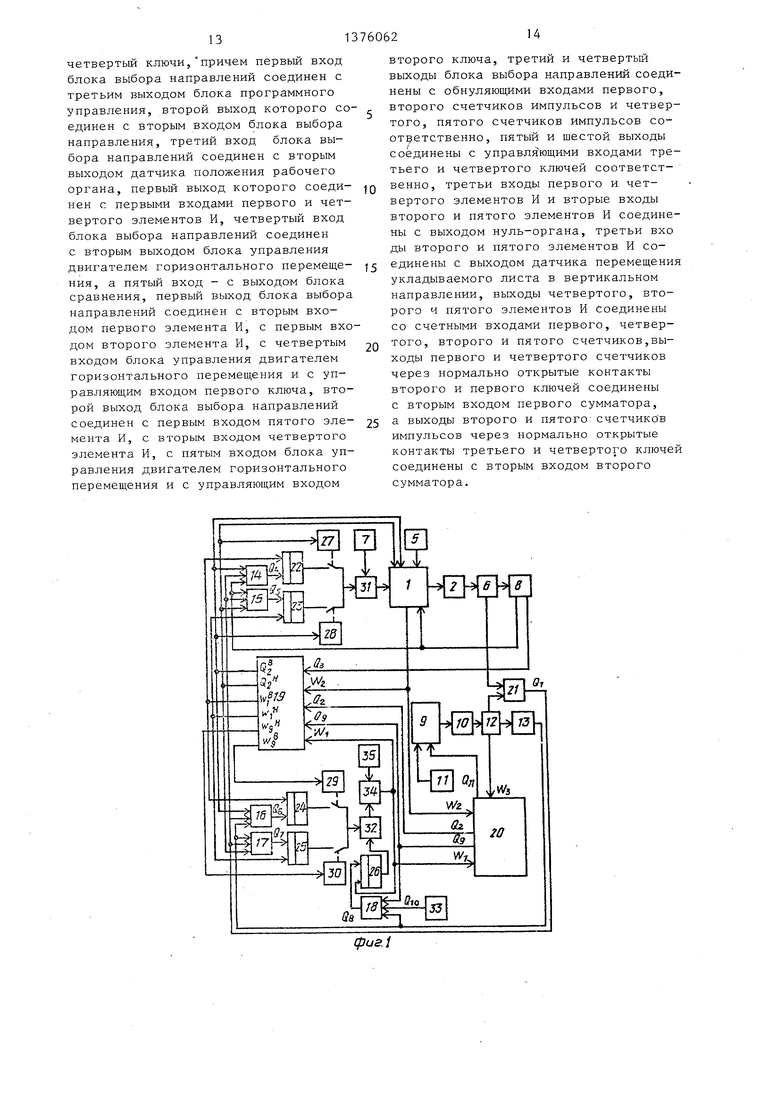
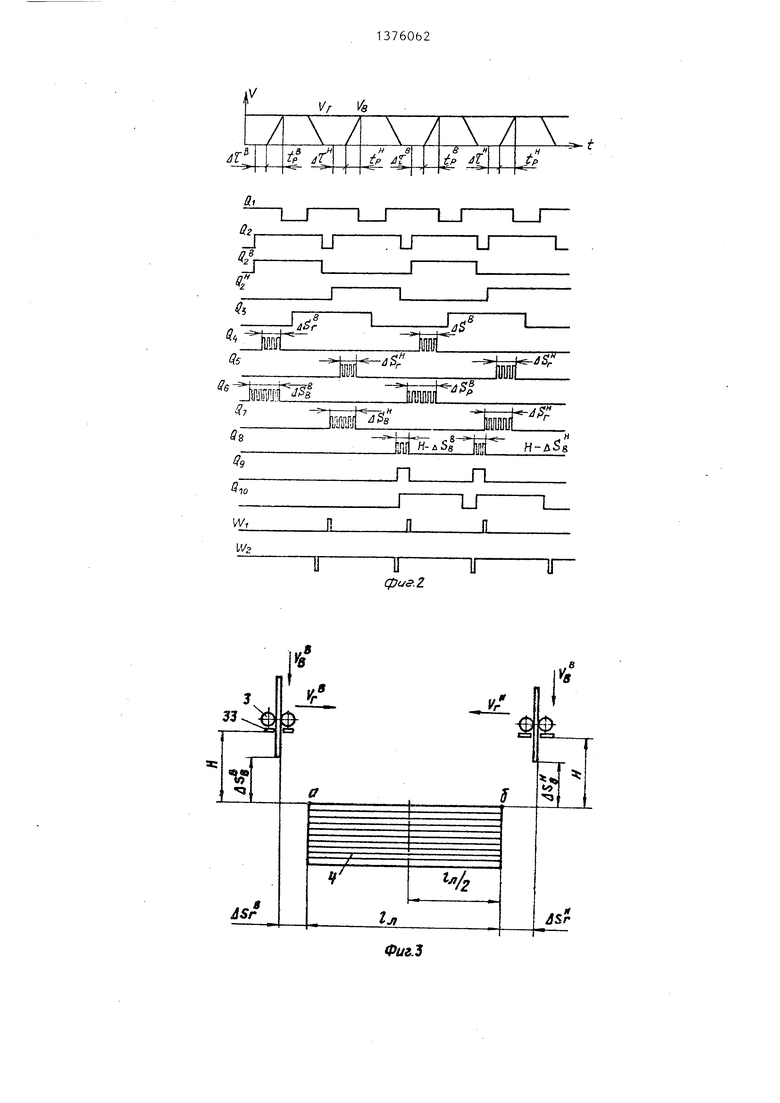
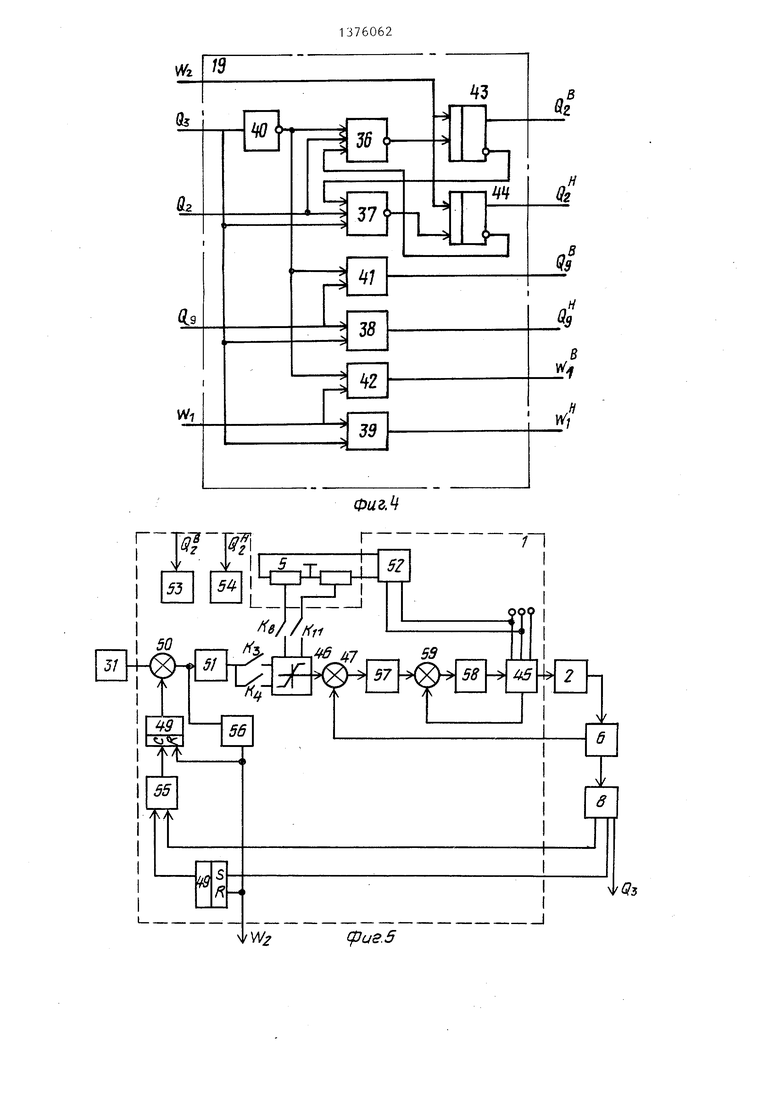
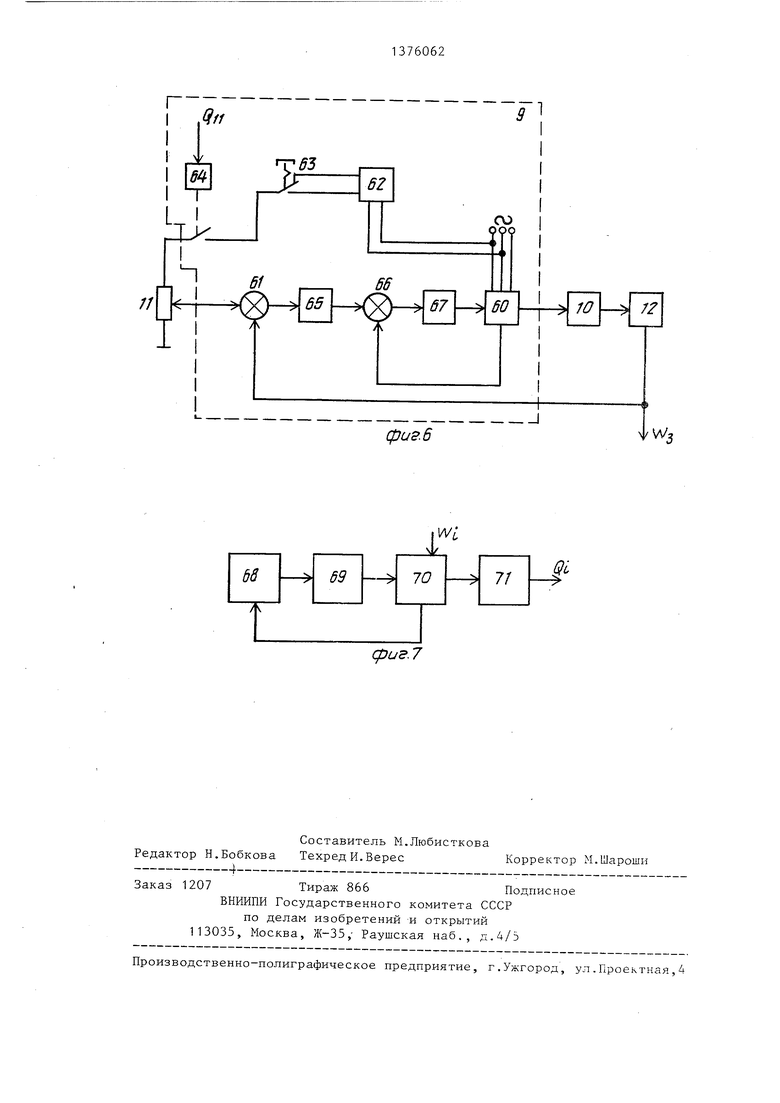
На фиг.1 представлена структурная схема системы для управления; на фиг.2 - временные диаграммы работы системы для управления; на фиг.З - исходное состояние устро; 1ства перед укладкой листа; на фиг.4 - схема блока выбора направления; на фиг.5-7 - структурные схемы блоков управления двигателем горизонтального, вертикального перемещения и блока программного управления соответственно.
Система для управления устройством укладки эластичных листов содержит блок 1 управления двигателем горизонтального перемещения, двигатель 2 горизонтального перемещения, рабо- .чий орган 3, платформу 4 (фиг.З), за датчик 5 скорости, датчик 6 скорости двигателя горизонтального перемещения, задатчик 7 и датчик 8 положения рабочего органа, блок 9 управления и двигатель 10 вертикального перемещения, задатчик 11 скорости, датчик ,12 скорости двигателя вертикального перемещеиия, датчик 13 перемещения укладываемого листа в вертикальном направлении, элементы И 14 - 18, блок 19 выбора направления, блок 20 программного управления, нуль-орган 21, счетчики 22-26 импульсов, ключи 27-30, сумматоры 31 и 32, датчик 33 регистрации подхода листа, устройство 34 сравнения, задатчик 35 постоянного расстояния Н.
Блок 19 выбора направления (фиг.4 содержит два элемента И-НЕ 36 и 37, элементы И 38 и 39,инвертор 40, элементы И 41 и 42, триггеры 43 и 44.
Блок 1 управления двигателем го ризонтального перемещения (фиг.5) содержит управляемый выпрямитель 45 нелинейный элемент 46, устройство 47 сравнения, триггер 48, счетчик 49, устройство 50 сравнения, цифроанало- говый преобразователь 51, блок 52 питания, реле 53 и 54, элемент И 55 нуль-орган 56, регулятор 57 напряже
.-
0
5
0
5
0
5
0
кия, регулятор 58 тока, устройство 59 сравнения. Блок 9 управления двигателем вертикального перемещения (фиг.6) содержит управляемый выпрямитель 60, блок 61 сравнения, блок 62 питания, кнопку 63 выбора направления вращения, реле 64, регулятор 65 напряжения, устройство 66 сравнения, регулятор 67 тока. Блок 20 программного управления (фиг.7) содержит тактовый генератор 68, наборное поле 69 задания программы, дешифратор 70, усилители 71.
Сигнал Q - команда на горизонтальное двихсение рабочего органа.
Сигнал Q регистрирует положение рабочего органа относительно середины величины горизонтального перемещения .
Сигнал Q на выходе триггера 43 - команда на горизонтальное движение рабочего органа вперед.
Сигнал Q на выходе триггера 44 - команда на горизонтальное движение рабочего органа назад.
Первый выход Q блока выбора направления соединен с вторыми входами элементов И 14 и 16,с управляющим входом ключа 28 и с третьим входом блока 1 управления двигателем горизонтального перемещения.
Второй выход Q блока выбора направления соединен с вторыми входами элементов И 15 и 17 и с управляющим входом ключа 27 и с четвертым входом блока 1 управления двигателем горизонтального перемещения.
Сигналы Q, Qj, Q, Q, Qg - сигналы с выходов элементов И 14-18 соответственно .
Сигнал Qg - разрешает подачу и укладку очередного листа.
45
50
Сигнал Q
с выхода элемента И 41 - разрешающая укладку листа
команда, вперед.
Сигнал
команда, разрешающая укладку листа назад.
Сигнал Q,g Q с выхода элемента И 38 выход- датчика 33
регистрации подхода листа.
Сигнал Q,, - выход блок-а 20 программного управления, поступает на вход блока 9 управления двигателем вертикального перемещения.
Сигнал W - информация о том, что торец укладываемого листа прошел от оси датчика 33 заданную величину.
Сигнал W, - с выхода устройства 34 сравнения поступает на вторые входы элементов И 42 и 39.
Сигнал W с выхода элемента И 42 - информация о том, что торец листа, который должен укладываться вперед, прошел от оси датчика 33 заданную величину.
Сигнал VJ с выхоц.а элемента И 39- информация о том, что торец листа, который должен укладываться назад, прошел заданную величину.
Сигнал W - информация о выполнении команды.
Сигнал W,
подтверждает включение двигателя вертикального перемещения. Снимается с датчика 12 скорости.
Блок 1 управления двигателем горизонтального перемещения выполнен на тиристорном преобразователе. Блок управления выполнен по схеме подчи- не,чного регулирования.
Регулирование скорости осуществляется путем изменения выпрямленного напряжения управляемыми выпрямителями 45 и функции сигнала задания напряжения, поступающего с нелинейного элемента 46, которое сравнивается в устройстве 47 сравнения с сигналом отрицательной обратной связи, поступающим с датчика 6 скорости.
В исходном положении на выходе триггера 48 и счетчика 49 сигналы равны О. Информация о величине горизонтального перемещения с сумматора 31 поступает в устройство 50 сравнения.
Нелинейный элемент 46 сделан так что его выходной сигнал определяется в зависимости от уровня входного сигнала, поступающего с цифроана- логового преобразователя 51. При высоком уровне входного сигнала на выходе нелинейного элемента напряжение равно напряжению,поступающему с задатчика 5, и не з-ависит от изменения этого входного сигнала.
При достижении входным сигналом некоторого заданного уровня выходной сигнал нелинейного элемента полностью определяется уровнем входного сигнала и не зависит от уровня напряжения, поступающе1о с задатчика 5 .
При входном сигнале, равном О, на выходе нелинейного элемента сигнал также равен О.
При поступлении команды от блока 19 выбора направления: Вперед Q или Назад Q, срабатывает одно из реле 53 или 54 и своими контактами подключает напряжение определенного знака с задатчика 5 и выход цифроаналогового преобразователя 51 к соответствующим входам нелинейного элемента.
Так как на выходе счетчика 49 сигнал ранне нулю, то с выхода цифроаналогового преобразователя 51 на вход нелинейного элемента поступает
сигнал высокого уровня (его величина определяется половиной величины горизонтального перемещения). Значит с выхода нелинейного элемента на вход устройства 47 сравнения поступает
напряжение с задатчика 5, которое определяет скорость укладки, и двигатель 2 начинает вращаться, т.е. начинается горизонтальное перемещение .
При достижении середины величины горизонтального перемещения с датчика 8 положения посТ упает импульс на установочный вход триггера 48. На выходе триггера устанавливается сигнал равный 1 и счетные импульсы с датчика положения 8 поступают через элемент И 55 на вход счетчика 49. Цифровой код величины горизонтального перемещения поступает на вход устройства 50 сравнения, где вычитается из цифрового кода, поступающего с сумматора 31.
Когда разница между заданной величиной горизонтального перемещения и пройденной величиной горизонтального перемещения станет равной некоторой заданной величины,то нелинейный элемент 46 уменьшает скорость горизонтального перемещения. И когда сигнал рассогласования, поступающий с устройства 50 сравнения, равен О, двигатель останавливается. Этим же сигналом происходит обнуление счетчика 49, установка триггера 48 в исходное состояние через нуль-орган 56, вырабатывающий одиночный импульс, который используется для подтверждения о выполнении заданного перемещения в блоке 20 программного управления и подготавливает цепи блока 19 выбора направления для последующего движения.
5 .1
Регулятор 57 напряжения, регулято 58 тока, устройство 59 сравнения стабилизируют заданную частоту вращения двигателя 2.
Напряжение с блока 62 питания поступает на задатчик 11 скорости через кнопку 63 выбора направления вращения и контакты реле 64, которое управляется сигналом Q,, , поступаю- щим с блока 20 программного управления.
При подаче сигнала Q „ контакты реле замыкаются, напряжение поступает в блок 61 сравнения и двигатель 10 начинает вращаться. Сигнал Wj подтверждения включения двигателя снимается с датчика 12 скорости и поступает в блок 20 программного управления. После поступления сигнала Q,, реле 64 становится на самоблокировку, поэтому после исчезновения сигнала Q,, двигатель продолжает работать. Для выключения двигателя используется специальная команда, ко- торая снимает самоблокировку реле 64 при зтом контакты размыкаются и двигатель останавливается.
Третий выход W, блока выбора направления соединен с обнуляющими
;;-;,ij.uiMH счетчиков 22 и 24.
н
ieтвepтый выход W блока выбора направления соединен с обнуляющими | -.о;|,ами счетчиков 23 и 25.
Пятый выход Уц блока выбора направления соединен с управляющим входом ключа 30.
га.
блока выбора на- с управляющим вхоЫестой выход W. правления соединен дом ключа 29.
Выходы элементов
И 14-17 соединены со счетными входами счетчиков 22-25 соответственно, нормально открытые контакты ключей 27 и 28 соеди .няют выходы счетчиков 22 и 23 соответственно с первым входом сумматора 31 , а его второй вход соединен с задатчиком 7 величины горизонтального перемещения. Выход сумматора 31 с первым входом блока 1 управления двигателем горизонтального перемещения.
Нормально закрытые контакты ключей 29 и 30 соединяют выходы счетчиков 24 и 25 соответственно с первым входом сумматора 32, а его второй вход соединен с выходом счетчика 26, счетный вход Qg которого соединен с выходом элемента И 18.
Второй вход Q ,д элемента И 18 соединен, с выходом датчика 33 регистрации подхода листа.
Выход сумматора 32 соединен с первым входом устройства 34 сравнения, а его второй вход соединен с выходом задатчика 35 постоянного расстояния Н.
Система работает следующим образом.
Рабочий орган 3 находится в одном из крайних положений (фиг.З). Задатчиком. 7 устанавливают величину горизонтального перемещения рабочего органа, равную половине длины укладываемого листа, так как блок 1 управления приводом горизонтального перемещения рабочего органа выполнен таким образом, что отработка заданной величины горизонтального перемещения начинается относительно середины горизонтального перемещения. С приходом управляющего сигнала на горизонтальное перемещение в блок 1 начинается горизонтальное перемещение рабочего органа, а отработка заданного перемещения начинается только после прохождения середины. Задатчиками 5 и 11 задают скорость укладки листов. Задатчиком 35 задают расстояние Н между плоскостью платформы и датчиком 33, которое поддерживается постоянным в процессе укладки листов.
После включения системы, до подачи листов, с блока 20 программного управления поступает сигнал Q,, на вход блока 9 управления двигателем вертикального перемещения и двигатель 10 начинает вращаться со скоростью заданной задатчиком 11.
При этом с импульсного датчика 13 импульсы поступают на входы элементов И 16-18. На входах этих элементов сигналы Qg, Q и Qj равны О, так как нет разрешающих сигналов Q, Q о и Q,, которые равны О, на прохождение импульсов через эти элементы. С датчика 12 скорости сигнал о величине скорости вертикального перемещения подается на один вход нуль-органа 21. Так как на другом его входе сигнал с датчика 6 равен О, то на его выходе сигнал Q 1 является разрешающим условием для прохождения импульсов через элементы И 14-17. При достижении двигателем 10 заданной скорости с датчика 12 на вход блока 20 поступает сигнал Wj 1, который вызывает появление на выходе блока 20 сигнала Q 1 (в соответствии с заданной программой) .
Сигнал Q 1 поступает в блок 19 выбора направления и вызывает появление на его выходе сигнала О - или
н
Q в зависимости от положения рабочего органа (сигнал Q). Допустим, что рабочий орган находится в крайнем левом положении Q-j,0 (фиг.2).
При этом импульсы с датчика 13 поступают через элемент И 16 на счетный вход счетчика 24, срабатывает ключ 28 и соединяет выход счетчика 23 (информация на котором пока равна О) с входом сумматора 31, включает блок 1 и двигатель 2 начинает вращаться через время A &® , рабочий орган 3 идет вперед, тогда импульсы с датчика 8 поступают через элемент И 14 на счетный вход счетчика 22,
По истечении времен t скорость горизонтального перемещения рабочего органа становится равной скорости вертикальн ого перемещения, на выходе нуль-органа 21 появляется сигнал QI О, который запрещает прохождение импульсов с датчика 13 через элемент И 16 на вход счетчика 24 с датчика 8 через элемент И 14 на вход счет10
15
20
При Q 1 импульсы с датчика 13 поступают через элемент И 17 на счетный вход счетчика 25, срабатывает ключ 27 и информация о величине горизонтального перемещения с выхода счетчика 22 поступает на вход сумматора 31,включается блок 1,двигатель 2 начинает вращаться через врем.я д.5р, а рабочий орган 3 идет назад. Импульсы с датчика 8 поступают через элемент И 15 на счетный вход счетчика 23.
и
По истечении времени t скорость горизонтального перемещения рабочего органа становится равной скорости вертикального перемещения, на выходе нуль-органа 21 появляется сигнал Q 0, который запрещает прохождение импульсов с датчика 13 через элемент И 17 на вход счетчика 25 и с датчика 8 через элемент И 15 на вход счетчика 23. На выходах счетчиксш 25 и 23 записана информация о величине
25
ДЗ
и
горизонтально- перемещения за время ьТ + t.
30
вертикального
и
ГО 1Л.О Л% 4 -144-JJJ,- Л.ЛЛ.УА -JtA -l- i- -I i- - - l-l - I-
После прохождения середины пути импульсы с датчика 8 поступают в блок 1 и сравниваются с информацией, поступившей с выхода сумматора 31, которая равна 1д| + uS. После отработки этой величины двигатель 2 останавливается и из блока 1 поступает сигнал Wj О
выходе появлется сигнал Q2 - в
в блок 19, м
на его
чика 22. На выходах счетчиков 24 и 22 блок 20, что вызывает появление на
его выходе следующей команды Qa 1 Сигнал 1 является одним из
40
45
записана информация о величине вертикального uSg и горизонтального AS л перемещения за время йТ + t .
После прохождения середийы пути импульсы с датчика 8 поступают в устройство сравнения блока 1 и сравнивают с информацией, поступившей с выхода сумматора, которая равна 1,/2, заданная задатчиком 7,и отрабатываются двигателем 2.
После отработки этой величины двигатель 2 останавливается и из блока 1 поступает сигнал W2 О в блок 19 и на его выходе сигнал Q, О и в блок 20, на выходе которого появляется следующая команда.
Сл едующей командой является снова команда на движение рабочего органа Q 1, которая вызывает появление 55 при этом элемент И 18 разрешает прохождение импульсов с датчика 13 на счетный вход счетчика 26. На выходе сумматора 32 появляется код числа.
50
разрешающих условии прохождения импульсов с датчика 13 через элемент И 18 на вход счетчика 26. Сигнал Q(j 1 поступает на вход блока 19 и на его выходе вызывает появление сигнала Q. 1, так как Q О в рассматриваемом положении рабочего органа,который включает ключ 29 и информация о величине S ,, с счетчика
15
24 поступает на вход сумматора 32. При первом появлении этой команды из блока 20 поступает сигнал на технологическое оборудование,который разрешает подачу листов на укладку.
Когда торец укладываемого листа проходит через датчик 33, тогда на его выходе появляется сигнал Q,o
на выходе блока 19 сигнала Q 1,
так как Qj 1 бочего органа.
в правом положении ра0
5
0
При Q 1 импульсы с датчика 13 поступают через элемент И 17 на счетный вход счетчика 25, срабатывает ключ 27 и информация о величине горизонтального перемещения с выхода счетчика 22 поступает на вход сумматора 31,включается блок 1,двигатель 2 начинает вращаться через врем.я д.5р, а рабочий орган 3 идет назад. Импульсы с датчика 8 поступают через элемент И 15 на счетный вход счетчика 23.
и
По истечении времени t скорость горизонтального перемещения рабочего органа становится равной скорости вертикального перемещения, на выходе нуль-органа 21 появляется сигнал Q 0, который запрещает прохождение импульсов с датчика 13 через элемент И 17 на вход счетчика 25 и с датчика 8 через элемент И 15 на вход счетчика 23. На выходах счетчиксш 25 и 23 записана информация о величине
5
ДЗ
и
горизонтально- перемещения за время ьТ + t.
0
вертикального
и
ГО 1Л.О Л% 4 -144-JJJ,- Л.ЛЛ.УА -JtA -l- i- -I i- - - l-l - I-
После прохождения середины пути импульсы с датчика 8 поступают в блок 1 и сравниваются с информацией, поступившей с выхода сумматора 31, которая равна 1д| + uS. После отработки этой величины двигатель 2 останавливается и из блока 1 поступает сигнал Wj О
выходе появлется сигнал Q2 - в
в блок 19, м
на его
блок 20, что вызывает появление на
0
5
5 при этом элемент И 18 разрешает прохождение импульсов с датчика 13 на счетный вход счетчика 26. На выходе сумматора 32 появляется код числа.
0
разрешающих условии прохождения импульсов с датчика 13 через элемент И 18 на вход счетчика 26. Сигнал Q(j 1 поступает на вход блока 19 и на его выходе вызывает появление сигнала Q. 1, так как Q О в рассматриваемом положении рабочего органа,который включает ключ 29 и информация о величине S ,, с счетчика
15
24 поступает на вход сумматора 32. При первом появлении этой команды из блока 20 поступает сигнал на технологическое оборудование,который разрешает подачу листов на укладку.
Когда торец укладываемого листа проходит через датчик 33, тогда на его выходе появляется сигнал Q,o
равный величине вертикального перемещения торца укладываемого листа от
оси датчика 33, который суммируется . в
iSпоступившим с
с кодом числа счетчика 24.
Сумма двух чисел сравнивается в устройстве 34 сравнения с заданной величиной Н задатчиком 35. При их равенстве на выходе устройства сравнения появляется импульсный сигнал W, 1, который обнуляет счетчик 26, по ступает в блок 19 и на его выходе появляется сигнал W, который обнуляет счетчики 22 и 24, подготавливая их к приему информации для следующего цикла.
Сигнал W, 1 поступает в блок 20, что вызывает появление на его выходе следующей команды Q 1. При этом Qq О и импульсы с датчика 13 не поступают на вход счетчика 26 через элемент И 18.
Из блока 19 появляется сигнал Q 1. Импульсы с датчика 13 поступают через элемент И 16 на счетный вход счетчика 24. Срабатывает ключ 28 и соединяет выход счетчика 23 с входом сумматора 31, код числа дS поступает на вход сумматора 31. Чере u J рабочий орган 3 идет вперед и импульсы с датчика 8 поступают-через элемент И 14 на вход счетчика 22
По истечении времени t скорость горизонтального перемещения рабочего органа становится равной скорости вертикального перемещения, торец укладываемого листа касается платформы 4 в точке а и начинается его укладка на платформу. На выходе нуль-органа 21 появляется сигнал Q, 0, который запрещает прохождение импульсов с датчика 13 через элемент И 16 на вхо счетчика 24 и с датчика 8 через элемент И 14 на вход счетчика 22. На выходах счетчиков 24 и 22 записана информация о величине вертикального Л8д и горизонтального iSp перемещений за время д. б + t. .
После прохождения середины пути блок 1 отрабатывает перемещение 1д + uS. После отработки перемещения укладываемый лист ложится на плат- форму и его второй торец оказывается в точке б, а рабочий орган проходит еще расстояние uSp и останавливается. Из блока 1 поступает сигнал W О в блок 19 и в блок 20. На выходе
блока 20 появляется следующая команда Q, 1 .
Сигнал Qq 1 поступает на элемент И 18 и на вход блока 19,на выходе которого появляется сигнал Q 1, так как Q 1 в этом положении рабочего органа. Включается ключ 30 и код числа uSg со счетчика 25 поступает на вход сумматора 32.
Когда торец укладываемого листа проходит датчик 33, тогда на его выходе появляется сигнал Q 1 . Элемент И 18 разрешает прохождение импульсов с датчика 13 на вход счетчика 26.
На выходе сумматора 32 появляется код числа, равный величине вертикального перемещения торца укладываемого листа от о си датчика 33, и код числа ЛУц, поступившего с выхода счетчика 25. Сумма двух чисел сравнивается в устройстве 34 сравнения с заданной величиной Н. При.их равенстве на выходе устройства сравнения появляется импульсный сигнал W 1, который обнуляет счетчик 26, поступает в блок 19 и на его выходе появляется сигнал w j , который обнуляет счетчики 23 и 25.
Сигнал Wf 1 поступает в блок
5
0
5
0
20,
1 . Из
Н 1
1 .
при этом Q о, а Q блока 19 появляется сигнал О
2
Импульсы с датчика 13 поступают через элемент И 17 на вход-счетчика 25, срабатывает ключ 27 и информация Д5р со счетчика 22 поступает на вход сумматора 31 и включается блок 1 . Через время д Г рабочий орган 3 идет назад. Импульсы с датчика 8 поступают через элемент И 15 на вход счетчика 23.
и
По истечении времени t скорость горизонтального перемещения рабочего органа становится равной скорости вертикального перемещения, торец укладываемого листа касается платформы 4 в точке б и начинается его укладка на платформу. На выходе нуль- органа 21 появляется сигнал Q,- О, который запрещает прохождение импульсов с датчика 13 через элемент И 17 на вход счетчика 25 и с датчика 8 через элемент И 15 на вход счетчика 23. На выходах счетчиков 25 и 5 23 записана информация о величине вертикального л So и горизонтальноU
го & S
+ tS.
перемещении за время дс.
После прохождения середины пути блок 1 отрабатывает перемещение 1 д,1 + лЗг. После отработки перемещения 1,2 укладываемый лист ложится на платформу и его второй торец оказывается в точке а, а рабочий орган проходит еще расстояние U S |. и останавливается. Из блока 1 поступает сигнал W О в блок 19 и в блок 20. На выходе блока 20 появляется следующая команда Q 1, и цикл укладки листов повторяется.
Таким образом, каждый раз при укладке очередного листа вперед, происходит передача кода числа Л s в сумматор 31, записанного при укладке предшествующего листа назад, передача кода числа Л S в сумматор 32, записанного при укладке предшествующего листа вперед, и обнуление счетчиков, на которых записана инВ В
формация величин Д5 и uS и их новая запись. При укладке очередного листа назад происходит передача кода числа ДЗ в сумматор 31, записанного при укладке предшествующего листа вперед, передача кода числа
U
iSg в сумматор 32, записанного при укладке предшествующего листа назад и обнуление счетчиков, на которых записана информация величин Л5 и
Н
bS. и их новая запись.
b
Информация о величине вертикального Д5ц и горизонтального Л8р перемещений за время t, йГ tp определяется и записывается на соответствующих входах первого и второг сумматоров при укладке предшествующего листа в одну сторону и используется для укладки последующего листа в эту же сторону.
Это позволяет исключить погрешности частоты вращения при изменени направления вращения двигателей, тахогенераторов и тиристорных преобразователей и неравномерность статических и инерционных моментов в рабочем пространстве подающего листы механизма и значительно повысить точность укладки листов при высоких скоростях укладки, что практически дает возможность производить укладку листов на платформу с высокой точностью при высо1 их скоростях.
Формула изобретени
Система для управления устройством укладки эластичных листов, со0
5
0
5
0
5
0
5
0
5
держащая блок программного управления, первый и второй элементы И,пер вый и второй счетчики импульсов,блок управления двигателем горизонтального перемещения, первый вход которого соединен с выходом первого сумматора, соединенного первым входом с выходом задатчика положения рабочего органа, второй и третий входы блока управления двигателем горизонтального перемещения соединены с выходом задатчика скорости и первым выходом датчика положения рабочего органа, выход датчика скорости двигателя горизонтального перемещения соединен с первым входом нуль-органа, а его вход - с первым выходом блока управления двигателя горизонтального перемещения, второй вход нуль-органа соединен с первым выходом датчика скорости двигателя вертикального перемещения, второй выход которого соединен с.входом датчика перемещения укладываемого листа в вертикальном направлении, третий его выход - с первым входом блока программного управления, а его вход - с выходом блока управления двигателем вертикального перемещения, первый и второй входы которого соединены с выходом задатчика скорости и с первым выходом блока программного управления соответственно, второй вход блока программного управления соедине н с выходом устройства сравнения, первый и второй входы которого соединены со ответственно с выходом задатчика постоянного расстояния Н и с выходом второго сумматора, первый вход которого соединен с выходом третьего счетчика, обнуляющий вход которого соединен с выходом устройства сравнения, а счетный вход - с выходом третьего элемента И, первый вход которого соединен с вторым выходом блока программного управления, второй вход - с выходом датчика регистрации подхода листа, третий вход - с выходом датчика перемещения укладываемого листа в вертикальном направлении, отличающаяся тем, что, с целью повышения точности укладки ли стов, путем исключения влияния динамических погрешностей исполнительного механизма и приводов, введены блок выбора направлений, четвертый и пятый элементы И, четвертый и пятый счетчики, первый, второй, третий
четвертый ключи, причем первый вход блока выбора направлений соединен с третьим выходом блока программного управления, второй выход которого со единен с вторым входом блока выбора направления, третий вход блока выбора направлений соединен с вторым выходом датчика положения рабочего органа, первый выход которого соеди- нен с первыми входами первого и четвертого элементов И, четвертый вход блока выбора направлений соединен с вторым выходом блока управления двигателем горизонтального перемеще- ния, а пятый вход - с выходом блока сравнения, первый выход блока выбора направлений соединен с вторым входом первого элемента И, с первым входом второго элемента И, с четвертым входом блока управления двигателем горизонтального перемещения и с управляющим входом первого ключа, второй выход блока выбора направлений соединен с первым входом пятого эле- мента И, с вторым входом четвертого элемента И, с пятым входом блока управления двигателем горизонтального перемещения и с управляющим входом
второго ключа, третий и четвертый выходы блока выбора направлений соединены с обнуляющими входами первого, второго счетчиков импульсов и четвертого, пятого счетчиков импульсов со- от етственно, пятый и шестой выходы соединены с управляющими входами третьего и четвертого ключей соответственно, третьи входы первого и четвертого элементов И и вторые входы второго и пятого элементов И соединены с выходом нуль-органа, третьи вхо ды второго и пятого элементов И соединены с выходом датчика перемещения укладываемого листа в вертикальном направлении, выходы четвертого, второго и пятого элементов И соединены со счетными входами первого, четвертого, второго и пятого счетчиков,выходы первого и четвертого счетчиков через нормально открытые контакты второго и первого ключей соединены с вторым входом первого сумматора, а выходы второго и пятого счетчиков импульсов через нормально открытые контакты третьего и четвертого ключей соединены с вторым входом второго сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления укладкой в стопу эластичных листов | 1985 |
|
SU1265698A1 |
| Устройство для автоматической стабилизации скорости шлифования | 1982 |
|
SU1046077A1 |
| Устройство для контроля и управления роторным экскаватором | 1984 |
|
SU1208135A1 |
| Система позиционирования с двухзонным регулированием скорости электропривода | 1991 |
|
SU1798765A1 |
| Установка для электроэрозионного легирования | 1987 |
|
SU1549685A1 |
| Многоканальное устройство для управления гальванообработкой | 1989 |
|
SU1672416A2 |
| Система управления агрегатом производства трехслойных панелей | 1985 |
|
SU1398940A1 |
| Устройство автоматического управления моталкой литейно-прокатного агрегата | 1983 |
|
SU1135514A1 |
| Электрогидравлический следящий привод | 1987 |
|
SU1462234A1 |
| Многоканальное устройство для управления гальванообработкой | 1988 |
|
SU1532948A2 |
Изобретение относится к производству резинотехнических изделий и может быть использовано во всех отраслях народного хозяйства для автоматической укладки эластичных листов . Целью изобретения является повышение точности укладки листов путем исключения влияния динамических погрешностей исполнительного механизма и приводов. Система для управления устройством укладки эластичных листов содержит блок управления, двигатели горизонтального и вертикального перемещения, рабочий орган, задатчик скорости, блок управления, датчики скорости, датчики перемещения укладываемого листа в вертикальном направлении, блок выбора направления, блок программного управления, нуль-орган, счетчики импульсов, ключи, сумматоры, датчик регистрации подхода листа, устройство сравнения, задатчик постоянного расстояния Н, задатчик положения рабочего органа, двигатель. Информация о величине вертикального и горизонтального перемещения укладываемого листа за время достижения рабочим органом заданной скорости горизонтального перемещения определяется и записывается на соответствующих входах первого и второго сумматоров при укладке предшествующего листа в одну сторону и используется для укладки последующего листа в эту же сторону. Это позволяет исключить погрешности частоты вращения при изменении направления вращения двигателей, тахогенераторов и тиристорных преобразователей и неравномерность статических и инерционньк моментов в рабочем пространстве подающего листа механизма и значительно повысить точность укладки листов при высоких скоростях укладки. 7 ил. (С (/)
U
u
U
L
г-таг-1и
ЕТ
г
ч
I 11 л7 55
Л I1 / 1 ж
АЗ. II
Tv / /N
/ws.
s /
и//
(pus. 5
Фиг. ц
г
4
Ч
83
61
66
{gb -Xg)со
OQO
66
-
фиг 6
j
/Wj
i
wi
QL
(риг.7
| Устройство для укладки эластичного материала в стопу | 1981 |
|
SU996306A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
