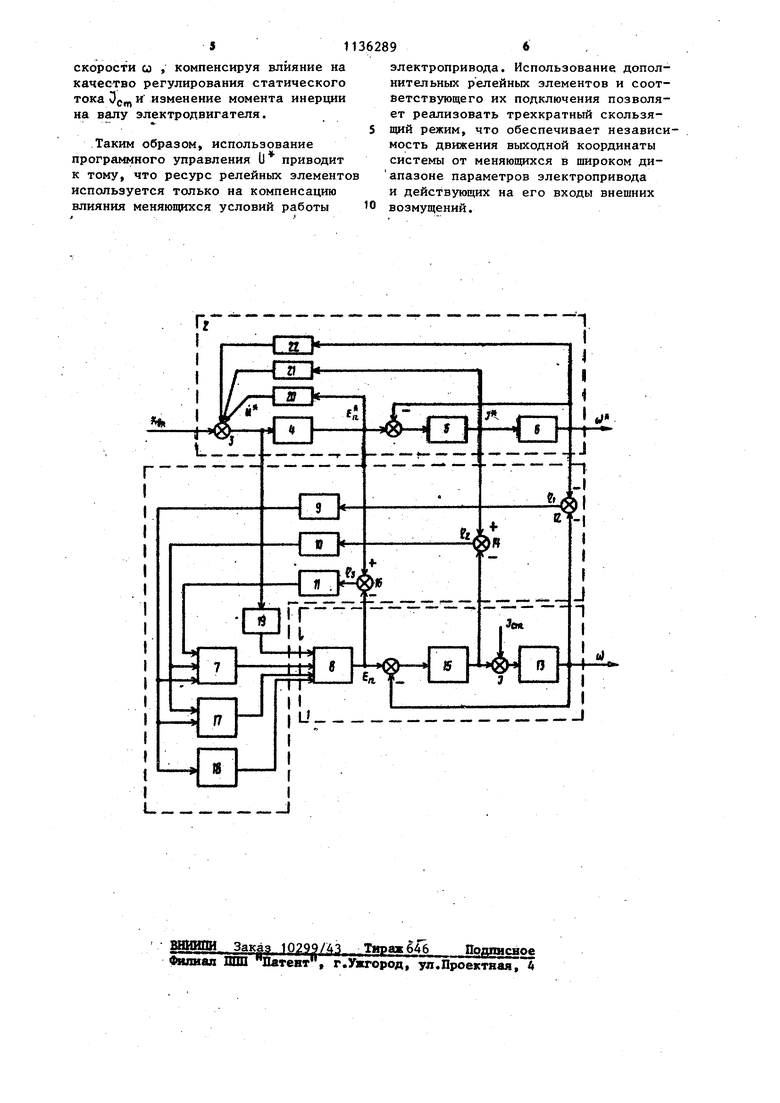
I Изобретение относится к электротехнике и может быть использовано для регулирования электроприводов постоянного тока, применяемьк в металлургии, химической промьппленности, машиностроении. Известна релейная система регулирования электропривода, содержащая последовательно включенные релейные регуляторы пути, скорости, тока, пре образователь и двигатель, причем выходы каждого из звеньев преобразователя и двигателя подключены i: входам регуляторов пути, скорости тока l Недостатками этой системы являются узость области существования скользящего режима и, следовательно большая чувствительность к переменным параметрам объекта регулирования и внешним возмущениям. Наиболее близким к изобретению по технической сущности является . система автоматического регулирования скорости электропривода, выполненного по. системе тиристорный преобразователь - двига.тель, содержащая модель замкнутого электропривода, состоящую из последовательно включенных сумматора, моделей преобразователя, цепи якоря и механичес кой части электродвигателя, выходы которых соединены с входами указанного сумматора, релейный элемент, выход которого соединен с входом тиристорного преобразователя, а входы подключены к выходам трех усилителей, каждьй из которых через от дельный сумматор соединен соответственно с выходами механической час ти электродвигателя и ее модели, с выходами якорной цепи электродвигателя и ее модели и с выходами тирис торного преобразователи и его модел Система всегда работает в области м лых отклонений, так как регулятор объекта всегда работает в скользяще режиме 23. Недостатком известной системы является то, что независимость выходной координаты электропривода достигается только от переменных па раметров того звена, на- вход которого действует управление (например тиристорного преобразователя). Изме нение параметров якорной цепи электродвигателя, момента инерции на ег валу, а также действие статического тока ухудшают качество регулировани 9 Цель изобретения - повышение точности компенсации параметрических и внешних возмущений электроприв1эда. Цель достигается тем, что система автоматического регулирования скорости электропривода, выполненного по системе тиристорный преобразователь - двигатель, содержащая модель замкнутого электропривода, состоящую из последовательно включенных сумматора, моделей преобразователя, цепи якоря и механической части электродвигателя, выходы которых с.оединены с входами указанного сумматора, релейный элемент, выход которого соединен с входом тиристорного преобразователя, а входы подключены к выходам трех усилителей, каждый из которых через отдельный сумматор соединен соответственно с выходами механической части электродвигателя и ее модели, с выходами якорной цепи электродвигателя и ее модели и с выходами тиристорного преобразователя и его модели, снабжена двумя релейными элементами и усилителем, вход которого подключен к выходу сумматора модели замкнутого электропривода, а выход - к входу тиристорного преобразователя, входы одного из введенных релейных элементов соединены с выходами первого и второго усилителей, вход второго введенного релейного элемента соединен с выходом первого усилителя, а выходы релейных элементов подключены к входу тиристорного преобразователя. На чертеже изображена функциональная схема системы автоматического регулирования скорости электропривода. Система автоматического регулирования скорости электропривода 1, выполненного по системе тиристорный Преобразователь - двигатель, содержит модель 2 замкнутого электропривода, состоящую из последовательно включенных сумматора 3, моделей 4,5 и 6 соответственно тиристорного преобразователя, цепи якоря и механической части электродвигателя, выходы котоpbijc соединены с входами сумматора 3, релейный элемент 7, выход которого соединен с входом тиристорного преобразователя 8, а входы подключены к выходам усилителей 9, 10 и 11, первый из которых через сумматор 12 соединен с выходами механической части 13 электродвигателя и ее модели 6,
второй - через сумматор 14 с выходами якорной цепи 15 электродвигателя и ее модели 5, третий - через сумматор 16 с выходами тиристорного преобразователя 8 и его модели 4. Система снабжена релейными элементами 17 и 18 и усилителем 19, вход которого подключен к вькоду сумматора 3 модели 2 замкнутого электропривода, вькод - к входу тиристорного преоб-, разователя 8, входы релейного элемента 17 соединены с выходами усилителе .9 и 10, вход релейного элемента 18 с выходом усилителя 9, а выходы релейных элементов 17 и 18 подключены к входу тиристорного преобразователя 8. Выходы моделей 4-6 соединены с сумматором 3 через усилители 20-22.
Входной сигнал Хщ определяет задание в статике (заданный уровень стабилизации) скорости W . В модели 2 формируются желаемые значения Е Лазовых координат электропривода со , Сформированные таким образом координаты модели 2 представляют собой задание в динамике и статике координатам Е, О ,со электропривода 1 .
Система работает следующим образом.
До подачи входного сигнала Хц на модель 2 желаемые значения фазоV, i i
вых координат Е ,3 ,Ы модели равны нулю, следовательно, на вход модели 4 тиристорного преобразователя поступает сигнал управления U 0,, на входы релейных элементов 7, 17 и 18 поступают нулевые сигналы, релейные элементы работают в скользящем режиме, причем выход каждого из релейных элементов равен нулю, поэтому на .вход тиристорного преобразователя 8 поступает нулевой суммарный сигнал После подачи входного сигнала Х на выходе сумматора 3 модели 2 посредством усилителей 20-22 формируется сигнал управления U одновременно поступающий на входы модели электропривода (вход модели 4 тиристорного преобразователя) и самого электропри вода (вход тиристорного преобразователя 8) посредством усилителя 19. При этом одновременно на выходах моделей 4,5 и 6 при помощи сумматора 3
4 X
формируются желаемые значения Е ,3 )Ы фазовых координат электропривода, которые могут быть измерены, и текущие (истинные) значения E,|W фазовых координат электропривода на выходах звеньев 8, 15 и 13. В сумматорах 12, 14 и 16 вычисляются отклонения (координаты возмущенного движения) 7. 1 текущих значений фазовых координат электропривода от их желаемых значений, которые через усилители 9-11 поступают на входы релейных элементов 7, 17 и 18.
Если модель точно моделирует динамические свойства электропривода, то сигнал управления U обеспечивает
,. .,
0
при использовании в качестве элементов 7, 17 и 18 как релейных элементов, так и линейных усилителей. На входы элементов 7, 17 и 18 поступают нулевые сигналы.
Таким образом, при идентичности свойств электропривода и свойств его модели регулирование ведется управляющим воздействием модели U, которое по отношению к электроприводу 1 является программным.
Если модель не идентична электроприводу, меняются его параметры или на него действуют внещние возмущения, то желаемые значения фазовых координат не равны действительным, отклонения 5 т г i равны нулю. Сигналы отклонения через усилители 911 поступают на входы релейных элементов 7, 17 и 18. Поскольку на вход электропривода 1 не подан входной сигнал X g)( , а подключены только выходы релейных элементов и программное управление U , то выбором параметров усилителей 9-11 обеспечивают работу релейных элементов 7, 17 и 18 в скользящем режиме при любом входном сигнале Xg. Релейный элемент 7, получая информацию о состоянии координат возмущенного движения м 2г, Чц обеспечивает скользящий режим, а следовательно, компенсацию изменения параметров тиристорного преобразователя 8 и внещних возмущений, приложенных к его выходу, в контуре регулирования координаты Е| . Релейный элемент 17, на вход которого не подключен усилитель 11, за счет информации о состоянии координат ) 2 2 обеспечивает скользящий режим и, следовательно, компенсацию изменения параметров якорной цепи 15 в контуре регулирования тока D . Релейный элемент 18 обеспечивает скштьзящий режим в контуре регулирования 1 скорости со , компенсируя влияние на качество регулирования статического тока 0(4 и изменение момента инерции на валу электродвигателя. Таким образом, использование программного управления U приводит к тому, что ресурс релейных элементо используется только на компенсацию влияния меняющихся условий работы 96 электропривода. Использование дополнительных релейньк элементов и соответствующего их подключения позволяет реализовать трехкратный скользящий режим, что обеспечивает независимость движения выходной координаты системы от меняющихся в широком диапазоне параметров электропривода и действующих на его входы внешних возмущений.

| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического регулирования скорости электропривода | 1984 |
|
SU1277331A1 |
| Электропривод по системе генератор-двигатель | 1982 |
|
SU1078564A1 |
| Система поддержания заданного соотношения скоростей | 1983 |
|
SU1136291A1 |
| Электропривод постоянного тока | 1985 |
|
SU1339853A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Электропривод постоянного тока | 1982 |
|
SU1061228A1 |
| Электропривод постоянного тока | 1987 |
|
SU1429268A1 |
| Релейная система управления | 1980 |
|
SU1001005A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2576594C1 |
СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ЭЛЕКТРОПРИВОДА, вьшолненного по системе тиристорный преобразователь - двигатель, содержащая модель замкнутого электропривода, состоящую из последовательно включенных сумматора, моделей преобразователя, цепи якоря и механической части электродвигателя, выходы которых соединены с входами указанного сумматора, релейный элемент, вькод которого соединен с входом тиристорного преобразователя, а входы подключены к выходам трех усилителей, каждый из которых через отдельный сумматор соединен соответственно с выходами механической части электродвигаггеля и ее модели, с выходами якорной цепи электродвигателя и ее модели и с выходами тиристорного преобразователя и его модели, отличающаяся тем, что, с целью повышения точности компенсации параметрических и внешних воз мущений электропривода, она снабже3 на двумя релейньми элементами и усилителем, вход которого подключен к выходу сумматора мoдeпи замкнутого электропривода, а выход - к входу тиристорного преобразователя, входы одного КЗ введенных релейных элементов соединены с выходами первого и второго усилителей, вход второго введенного релейного элемента соеди нен с выходом первого усилителя, а :о выходы релейных элементов подключены Эд к входу тиристорного преобразователе. х ;о
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Зеленов А.Б | |||
| Синтез и исследование релейных систем управления электроприводом постоянного тока | |||
| Известия вузов | |||
| Электромеханика, 1979, № 5, с | |||
| Ручная тележка для реклам | 1923 |
|
SU407A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Загороднюк В.Т., Жиляков В.И., Садовой В.А | |||
| Синтез регуляторов электропривода промьшшенных роботов.Межвузовский сб | |||
| Системы управления горными машинами, Новочеркасск, 1979, с | |||
| Прибор, автоматически записывающий пройденный путь | 1920 |
|
SU110A1 |
