Изобретение относится к электротехнике и может быть использовано в электроприводах постоянного тока.
Цель изобретения - повьшение каче ства регулирования при действии параметрических и внешних возмущений.
На чертеже приведена схема элект- р опривода.
Электропривод постоянного тока сЬдержит последовательно включенные з|адатчик 1 скорости, первый сумматор 2J, релейньш элемент 3, первый интегратор 4, тиристорный преобразователь 5, электродвигатель 6- постоянного то ка, механически связанный с электро- звигателем 6 датчик 7 скорости, и идентификатор 8 состояния в виде последовательно включенных фильтра 9, Еторого сумматора 10, второго интег- piaTopa 1 1 ,измерителя 12 ошибки оцен 1 :и и третьего интегратора 13. i Токовый, скоростной и моментные выходы идентификатора 8 состояния соединены с соответствующими входами первого сумматора 2. Выход -измерите- ля 12 ошибки оценки подключен к дополнительному входу первого сумматора 2, а выход релейного элемента 3 соединен с входом фильтра 9 инденти- фикатора 8 состояния.
Выход измерителя 12 ошибки оценки подключен к входам фильтра 9, сумматора 10у интегратора 13, сумматора 2 а выходы интеграторов 11 и 13 - соот ветственно к входам фильтра 9 и второго сумматора 10. Входы идентификатора 8, а именно фильтра 9 и измерителя 12 ошибки оценки, подсоединены соответственно к выходам релейного элемента 3 и датчика 7 скорости. Выходы идентификатора 8, а именно фильтра 9, интегратора 11, измерителя 12 ошибки оценки И интегратора 13 подключены также к входам суммато- ра 2,
Выходы фильтра 9, второго 11 и третьего 13 интеграторов являются соответственно токовьм, скоростным и моментным выходами идентификатора 8 состояния.
Электропривод работает следующим образом,
. Сумматор 2 формирует входной сигнал релейного элемента 3 на основе информации о текущем состоянии объекта и заданного качества переходного процесса согласно уравнению
(n-Q)+ I- {a,-n)-c(Q-о)dt
.
и.
и ir 1 « I с Kgc
где Q - заданное значение скорости . электродвигателя; I ,5i,Mg - оценки тока 1, скорости П и момента М сопротивления электродвигателя 6; выходное напряжение измерителя 12 ошибки оценки; суммарный момент инерции на валу электродвигателя; К. - коэффициент передачи датчика 7 скорости; CiCg,К - постоянные коэффициенты;
S - функция переключения. Релейный элемент 3 при выполнении условия существования скользящего режима
(2)
работает в режиме высокочастотных переключений (скользящий режим).
Алгоритм функционирования релейного элемента 3 соответствует уравнени
и и„signs,(3)
где U const.
О
Первый интегратор 4 предназначен для формирования среднего значения разрывного сигнала релейного элемента 3 соответственно уравнению
-tгр
-
и,
V
(4)
где Т, постоянная интегрирования;
и
8
-входное напряжение преобразователя 5;
-выходное напряжение релейного элемента 3.
Работа электродвигателя 6 описыается системой уравнений
и.
i
+
L
L:
и.
(5) (6)
0
5
Тиристорный преобразователь 5 и электродвигатель 6 представляют собой объект регулирования,
Для реализации алгоритма управления в соответствии с (1) в предлагаемом электроприводе используются вместо I,Q,M. соответствующие оценки I,j,l ,М , получаемые с идентификатора 8. В основу построения идентификатора 8 положены уравнения (5) и (6). При этом в уравнении (5) пренебрегй- ют инерционностью преобразователя 5 и предполагают, .что изменение момента
31429268
сопротивления нагрузки происходит микой, определенной выбором масштабных весьма медленно и приближенноудовлет- коэффициентов 1 .1,1 , Поскольку ди- .
намические процессы в идентификаторе, синтезированном по {5)-(7), протекают
воряет уравнению
М,0. .,, В результате синтеза идентификато- значительно быстрее, чем соответствую
(7)
т - Т
Я
i Y (,-Mj+i K,(,
pa 8 по уравнениям (5)-(7) получают следующую систему уравнений идентификатора:
1,+ .-.а+1,К (Q-Q); L J а л (8)
(9)
,(),(10)
где 1,,, 1 - заданные постоянные коэффициенты обратной связи, обеспечивающие желаемый темп затухания ошибки оценки U Ujj-U на выходе измерителя 12.
Эти коэффициенты выбирают таким образом, чтобы процессы в системе протекали быстрее- например, на порядок чем процессы в объекте, и чтобы
щие процессы в объекте, то в первом приближении можно считать, что сигналы T,a,Mj, всегда соответствуют фак10 тическим и оишбка , При суммировании сигналов с выходов идентификатора 8 с напряжением UQ, согласно ( 1) сигнал на выходе сумматора 2 всегда стремится к нулю. На выходе релейного
15 элемента 3, при выполнении условия (2, Возникает режим высокочастотных переключений, а на выходе интегратора 4 и тиристорного преобразователя 5 устанавливается такое значение напря20 жений Ug,,, при котором скорость вращени я двигателя 6 равна заданной Q n.const,
При изменении задающего сигнала UQ , например его увеличении, сигнал
При изменении задающего сигнала UQ , например его увеличении, сигнал
при этом обеспечивалась фильтрация
помех, содержащихся во входных сигна- 25 S на выходе сумматора 2 становится
лах индентификатора 8, Таким образом, больше нуля (), в результате увебольше нуля личиваются напряжения Ui.,Ug,Ujj на выходах релейного элемента 3, интегратора А, тиристорного преобразовав 30 теля 5, и, как следствие, возрастает угловая скорость вращения О. электродвигателя 6 до заданной. Вместе с ростом угловой скорости двигателя 6 происходит синхронное увеличение ее
идентификатор 8 представляет собой динамическую систему с обратной связью, которая на основе сигналов U(,,Ujj восстанавливает величины 1, Mj,
в виде их оценок I,,, ,М и за счет
и с
связей по и,, с выхода релейного элемента 3 на вход индентификатора 8 и по и,1а,1 М с его выходов на вхобольше нуля личиваются напряжения Ui.,Ug,Ujj на выходах релейного элемента 3, интегратора А, тиристорного преобразовав 30 теля 5, и, как следствие, возрастает угловая скорость вращения О. электродвигателя 6 до заданной. Вместе с ростом угловой скорости двигателя 6 происходит синхронное увеличение ее
ды сумматора 2 позволяет организовать с оценки Q на выходе идентификатора 8 устойчивый скользящий режим в контуре (при равенстве параметров идентифика- управления - сумматор, релейньш элемент, идентификатор, не затрагивая
объект регулирования.
ти и , соответствующий установившемуся режиму, при кбтором поступает на первый вход первого сумматора 2, где суммируется с сигнатора и объекта), поскольку напряжение с выхода релейного элемента -3 поступает также на вход идентификаСигнал заданного значения скорое- 40 тора 8, В результате сигнал на выходе
измерителя I1 ошибки оценки равен нулю. Увеличение сигнала оценки скорости, поступающего на вход суммато ра 2, вызьшает уменьшение сигнала S,
лами 1 ,S iM(,Uf, поступающими с вы- 45 . согласно (l), При проходов идентификатора 8, При соответ- цесс происходит аналогично, однако
характер изменения сигналов соответствует (отрицательная величина стремится к нулю, уменьшаясь по абсолютной величине). При выполнении ус-; ловия существования скользящего режима (2) в системе: сумматор 2 - релейный элемент 3 - идентификатор 8 возствии параметров индентификатора 8 параметрам объекта сигналы оценок 1, Я ,М всегда соответствуют фактическому значению переменных объекта , О. ,М и . При малейшем отклонении параметров идентификатора от параметров объекта возникает сигнал ошибки оценки и,который согласно (8)-(lO)
50
никает режим высокочастотных переклюв качестве сигнала обратной связи noc-ggчений, при котором согласно (l) , тупает на входы фильтра 9, сумматораРешение уравнения () определяет ха- 10 и интегратора 13, В результате рактер преходного процесса изменения этого в идентификат ре 8 протекаетошибки по скорости, т.е. качество ре- процесс уменьшения U до нуля с дина-гулирования
.,, като
(7)
щие процессы в объекте, то в первом приближении можно считать, что сигналы T,a,Mj, всегда соответствуют фак10 тическим и оишбка , При суммировании сигналов с выходов идентификатора 8 с напряжением UQ, согласно ( 1) сигнал на выходе сумматора 2 всегда стремится к нулю. На выходе релейного
15 элемента 3, при выполнении условия (2, Возникает режим высокочастотных переключений, а на выходе интегратора 4 и тиристорного преобразователя 5 устанавливается такое значение напря20 жений Ug,,, при котором скорость вращени я двигателя 6 равна заданной Q n.const,
При изменении задающего сигнала UQ , например его увеличении, сигнал
25 S на выходе сумматора 2 становится
больше нуля (), в результате увебольше нуля личиваются напряжения Ui.,Ug,Ujj на выходах релейного элемента 3, интегратора А, тиристорного преобразовав 0 теля 5, и, как следствие, возрастает угловая скорость вращения О. электродвигателя 6 до заданной. Вместе с ростом угловой скорости двигателя 6 происходит синхронное увеличение ее
50
никает режим высокочастотных переклюX(t)X6l
(И)
где XsQ-n i
Х„(й-О,) - величина ошибки в
V О
момент возникновения скользящего ретккна.
Отсюда следует, что предлагаемый электропривод обеспечивает монотонны характер переходного процес(а с за- данной постоянной времени Т, которая зависит не от параметров объекта, I а лишь от коэффициента С, который может быть задана соответствии сже- лаемым критерием качества регулиро.ва ния, В итоге в установившемся режиме пол1Д1ают O., Q П. Условие существо- вания скользящего режима (2) выполня ется путем выбора величины модуля (напряжения релейного элемента 3,
i Таким образом, благодаря организа- :ции в системе скользящего режима и использованию в качестве информации о:состоянии объекта сбответствующих оценок идентификатора обеспечивается малая чувствительность к параметрическим и внешним возмущениям,
5
0
5
Формула изобретения
Электропривод постоянного тока, содержащий последовательно включенные задатчик скорости, первый сумматор, релейньй элемент, первый интегратор, тиристорный преобразователь, выход которого подключен,к якорной обмотке электродвигателя, датчик скорости электродвигателя, MexaHipiec- ки связанный с электродвигателем, и идентификатор состояния в виде последовательно включенных фильтра, второго сумматора, второго интегратора, измерителя ошибки оценки, третьего интегратора, причем токовый, скоростной и моментный выходы идентификатора состояния соединены с соответствующими входами первого сумматора, о т - личающийся тем, что, с целью повьшения качества регулирования при действии параметрических и внешних возмущений, выход измерителя ошибки оценки подключен к дополнительному входу первого сумматора, а выход релейного элемента - к входу фильтра идентификатора состояния.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического регулирования скорости электропривода | 1984 |
|
SU1277331A1 |
| Самонастраивающаяся система управления | 1982 |
|
SU1071997A1 |
| Устройство для стабилизации натяжения нитей при перемотке | 1985 |
|
SU1279934A1 |
| Устройство для управления электроприводом | 1982 |
|
SU1061105A1 |
| Система управления | 1983 |
|
SU1120283A1 |
| Устройство для регулирования натяжения длинномерного материала при перемотке | 1986 |
|
SU1395579A1 |
| Система управления объектом с упругими связями | 1980 |
|
SU941923A1 |
| Система управления электроприводом | 1985 |
|
SU1283712A1 |
| Устройство для компенсации активно-гО TOKA уТЕчКи | 1979 |
|
SU851625A1 |
| Система автоматического регулирования скорости электропривода | 1983 |
|
SU1136289A1 |
Изобретение относится к электротехнике и может быть .использовано в регулируемых , электроприводах постоянного тока, применяемых в металлургии, машиностроении, химической и текстильной промьшшенности. Целью изобретения является повышение качества регулиро вания при действии параметрических и внешних возмущений. Устройство содержит измеритель 12 ошибки оценки, выход которого подключен к дополнительному входу первого сумматора. Выход релейного элемента 3 подключен к входу фильтра 9 идентификатора 8 состояния. В данном устройствеg благодаря организации скользящего режима и использованию информации с идентификатора обеспечивается малая чувствительность к параметрическим и внешним возмущениям. I ил. . СЛ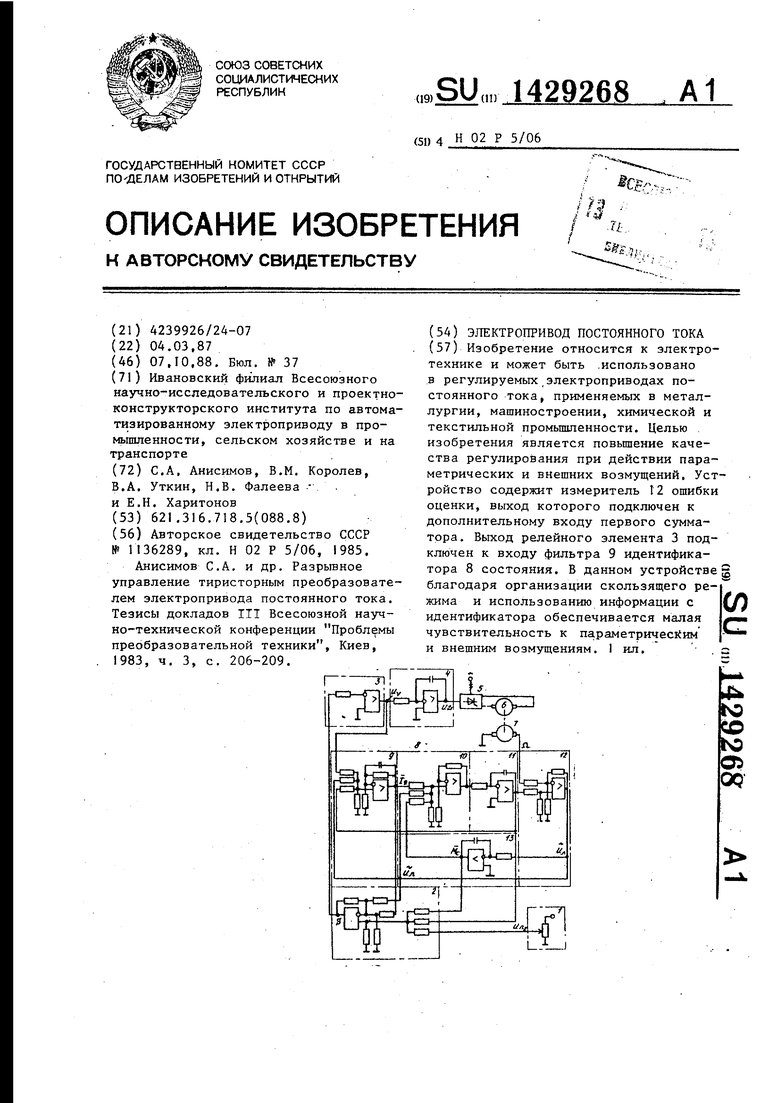
| Система автоматического регулирования скорости электропривода | 1983 |
|
SU1136289A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Анисимов С.А | |||
| и др | |||
| Разрьшное управление тиристорным преобразователем электропривода постоянного тока | |||
| Тезисы докладов III Всесоюзной научно-технической конференции Проблемы преобразовательной техники, Киев, 1983, ч | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Г | |||
