.(54) РЕЛЕЙНАЯ СИСТеЛА УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Устройство для управления электроприводом | 1982 |
|
SU1061105A1 |
| Электропривод по системе генератор-двигатель | 1982 |
|
SU1078564A1 |
| Устройство для управления электроприводом | 1984 |
|
SU1187149A1 |
| Система автоматического регулирования скорости электропривода | 1983 |
|
SU1136289A1 |
| Система автоматического регулирования скорости электропривода | 1984 |
|
SU1277331A1 |
| Система управления | 1979 |
|
SU847272A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| Частотно-управляемый электропривод | 1988 |
|
SU1527701A1 |
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ГАРМОНИЧЕСКИМ МОМЕНТОМ НАГРУЗКИ В ШИРОКОМ ДИАПАЗОНЕ СКОРОСТЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2761780C1 |
Изобретение относится к автоматическому управлению и может быть использовано при создании системы упраьпения эпектроприводом в метаппургии, химической промышленности, машиностроении.
Известная система автоматического регулирования электроприводам, содержащая репейный регулятор и силовую часть электропривода, имеет малый диапазон изменения параметров электропривода, по отношению к которым достигается параметрическая инвариантность С1
Недостаток известной системы - малая точность при изменении параметров системы.
Наиболее близким техническим решением к предлагаемому является система управления, содержащая последовательно соединенные фильтр, апериодическое зве. но, сумматор, звено якоря двигателя, механическое звено двигателя, редуктор регулятор пути, регулятор скорости и регулятор тока, вход редуктора через
усилитель соединен со вторым входом сумматора, выход апериодического звена соединен с вторым входом регулятора то на, выход звена якоря двигателя с третьим входом регулятора тока и вторым
5 ВХОДОМ регулятора скоростИг вход пещтс тора соединен с четвертым входом регулятора тока„ третьим входом регулятора скорости и вторым входом регулятора путиГз.
10 Недостатком,этой системы является малая точность из-ва малого диапазона изменения параметров объекта по отношению к которому достигается цараметр ческая инвариантность. Кроме того, в
20
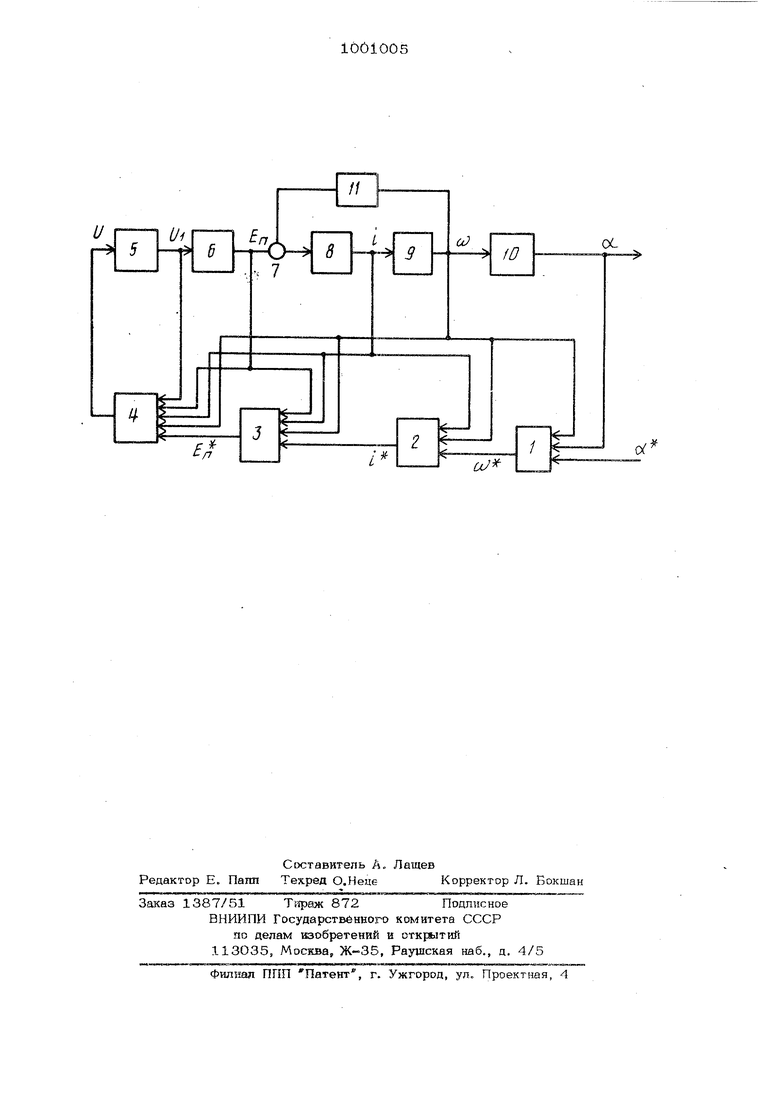
Цель тюобретения - расширешю диапазона параметрической инвариантности и обеспечения инвариантности относительно внешних BoaMj-TnemiA (обеспечение ус«- 316 ловий двухкратной инвариантносги), т.е, повышение точности. Поставленная цель достигается тем, что система содержит регулятор напряжения, выход которого соединен с входом фильтра, первый вход - с выходом фильтра, второй, третий, четвертый и пятый входы соединены соответственно с первым, вторым, третьим и четвертым вхо дами регулятора тока. На чертеже представлена схема предлагаемой системы. Система содержит последовательно соединенные релейные регуляторы пути 1, скорости 2, тока 3, напряжения преобразователя 4, фильтр 5, апериодическое звено 6, сумматор 7, звено 8 якоря двигателя, механическое звено 9 двигателя, редуктор 10, причем выход механического звена 9 двигателя посредством усилителя 11 подключен к входу суммато ра 7, выход фильтра 5 - к входу регулятора 4, выход апериодического звена 6 к входам регуляторов 4 и 3, выход звена 8 якоря двигателя - к входам регуляторов 4, 3 и 2, выход механического звена 9 двигателя - к входам регуляторов 4,3,2 и 1, выход редуктора 1О к входу регулятора 1. Рассмотрим работу системы. После подачи на вход системы задания g( первым будет работать в скользящем режиме регулятор 3 тока. При этом дви жение системы регулирования не зависит от параметров звена, на вход которого воздействует выход регулятора, работающе го в скользящем режиме, В системе таким звеном является фильтр с передаточной функцией Поэтому движение системы не зависит от параметров К, Т и они, следователь но, могут изменяться в широком диапаар- не. От всех других параметров объекта движение системы в скользящем режиме зависит. Поэтому диапазон их 1гаменен1ш, при котором достигается параметрическа инвариантность (нечувствительность выход ной величины oL от изменения параметров объекта), определяется тем диапазоном, при котором не происходит нарушения скользящего режима. Как показывают исследования, этот диапазон узок. Вторым начнет работать в скользящш режиме регулятор 2 скорости. После этого регулятор 3 тока, являясь проме жетонным репейным элементом, будет 054 воспроизводить переключения регулятора 2 скорости. Таким образом, регуляторы 2 и 3 будут работать как одно реле. Следовательно, релейные регуляторы тока и скорости, переключаясь с одинаковой частотой, реализуют однократный скользящий режим. При этом полностью К1 1пенсируется лишь изменения парам;етров Кх,, Т фильтра во всем диапазоне их изменения. Дальнейшее совершенствование этих систем связано с организацией многократных скользящих режимов, когда каждый из последовательно включенных ре- лейных элементов со своей частотой скользящего режима обеспечивает нечув ствительность движения системы от изменения параметров объекта. Поэтому система реализует многократный (четырех кратный) скользящий режим, причем скользящие режимы регулятора 4 обеспечивают нечувствительность к изменению параметров фильтра 5; регулятора 3к изменению параметров преобразователя 4; регулятора 2 - к изменению параметров якорного звена 8; регулятора 1 - к изменению параметров механического звена 9 двигателя. Причем диапазон изменения этих параметров может быть любой, поскольку движение системы в скользящем режиме не зависит от параметров ;звеньев 5,6,8 и 9. Покажем это, раосмотрев работу системы, После подачи на вход системы задания oL все регуляторы 1-4 переводятся в режим насыщения (опрокинуты) и начинается процесс последовательного вывода фазовых координат на уровне стабилизации. При этом объект регулирования может быть представлен системой. Чз n Vn-45 -i а управление, поступающее на вход объекта регулирования, т.е. на вход фильтра 5 с выхода регулятора 4 u u s4n E;-u-v- -)l , , Первым достигает заданного значения Е ц ЭДС преобразователя Е„, после чего рюгулятор 4 начнет работать в скользящем режиме. При этом в , (3) и замкнутая система в скользящем режиме №1ражается в систему (3) , ш Ъ, li) b3 i -«-b3ji4VE, V- A b slEn- n- ), Таким образом, в системе скомпенси рованы параметры tj-.ti (шта К, Т) .фильтра 5. Теперь система (4) есть объект управления и на его вход поступает с выхода pe yлятopa 3 управление U,( -i-ш), I - Л I (5у (5) .ui i/bO, Когда в (5) выполняется условие -i -UJ 0,(6) то регулятор 3 начинает работать в скол зящем режиме и система (4), (5) вырож дается в систему. с.,,.ш, , I : Таким образом, скользящий режим регулятора 3 обеспечивает компенсацию па раметров Ъ, звена -6. Аналогично можно показать, что при работе регулятора 2 в скользящем режиме компенсируются параметры якорной цепи 8 и система описывается уравненй ем.. . + , Ш ), (8; и наконец, при работе регулятора i в скользящем режиме компенсируются влияния параметров механического звена 9 двигателя и движение системы определяется уравнением . ( Итак, при работе регуляторов 1-4 в скользящем режиме компенсируются влия ние параметров звеньев 4,5,8,9 и 11 на движение системы, которое определяется уравнением (9). Предлагаемая система позволит практически устранить влияние параметрических возмущений, а следовательно, и внеп них возмущений, действующих на входы объекта регулирования, за счет оргаин i os зации многократного скользящего режима, который реализуется введением дополнительного релейного {жгупятора 4 и новой взаимосвязью объекта с регуляторами. Использование предлагаемой системы позволит строить практически инвариантные к параметрическим и внешним возмущениям системы управления электроприводом. Формула изобретения . Релейная система управления, содержащая последовательно соединенные фигlьтp апериодическое звено, сумматор, звено якоря двигателя, механическое звено двигателя, редуктор, регулятор пути, регулятор скорости и регулятор тока, вход редуктора через усилитель соединен с вторым входом сумматора, выход апериодического звена соединен с вторым регулятора тока, выход звена якоря двигателя соединен с третьим входом регулятора тока и вторым входом регулятора скорости, вход редуктора соединен с четвертым входом регулятора тока, третьим входом регулятора скорости и вторым входом регулятора пути, о т л И- чающаяся тем, что, с целью по.ы 1шения точности системы при параметрических возмуихенкях, она содержвт регулятор напряжения, выход которого соединен с входом фильтра, первый вход - с выходом фильтра, второй, третий, четвер тый и пятый входы соединены соответственно с первым, вторым, третьим к четвертым входами регулятора тока. Источники информации, принятые во внимание при экспертизе 1.Анхимюк В. Л.. Опейко О, Ф. О пааметрической инвариантности релейной истемы управлентш электропроводом. . Автоматика и телемеханика, 1973, 11, с, 155-157. 2.Зеленов А. Б. Синтез и исследование релейных Систем управления электрориводом постоянного тока. - Электроеханика, 1979, N9 5, с, 407-413 (прототип).
