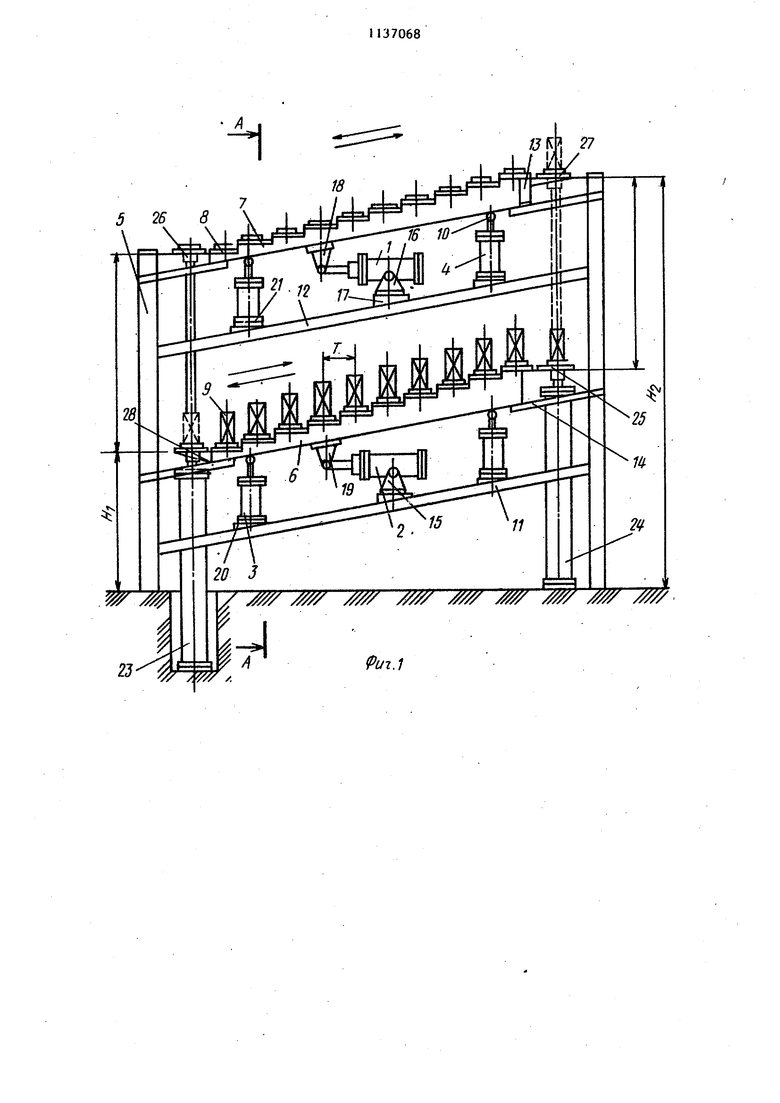
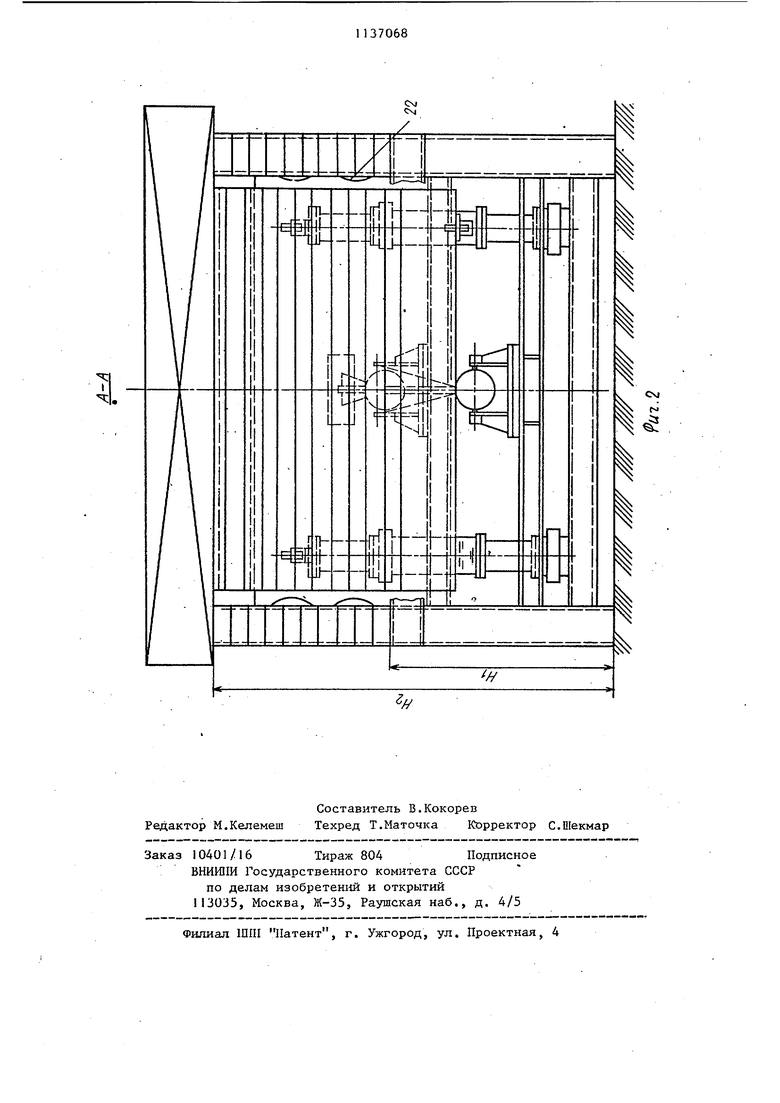
Изобретение относится к подъемнотранспортному машиностроению, в час ности к устройствам для перегрузки штучных грузов, и может быть использовано для.межоперационного на лонного транспортирования штучных грузов. Известно устройство для перегрузк штучных грузов, содержащее основани на наклонных блока которого установле ны две подвижные рамы, связанные с механизмами их перемещения в горизонтальной и вертикальной плоскостях при этом подвижные рамы и поверхность основания имеют ступенчатую форму с одинаковым шагом ступенек Недостатком известного устройства является его большая металлоемкость , при этом передача грузов и весь транспортный процесс происходит только по одному ярусу устрой- ства и только в одной-наклонной плоскости, что требует большой производственной площади цеха. Цель изобретения - уменьшение металлоемкости устройства и экономии производственной гапощади цеха. Для достижения поставленной цели устройство для перегрузки штучных грузов, содержащее основание, на накло1;ных балках которого установлены две подвижные рамы, связанные с механизмами их перемещения в горизонтальной и вертикальной йлоскостях j при этом подви кные рамы и поверхность основания имеют ступенчатую форму с одинаковым шагом,ступенек, снабжено регулируемыми по высоте опорами, на которых смонтированы упомянутые механизмы перемещения подвиркных рам в горизонтальной и вертикальной плоскостях, выполненные соответственно с гидроцилиндрами и гидродомкратами,опорными роликами, на которых установлены подвиж1а 1е рамы, вилочными захватами, которые смонтированы на консолях подвижных рам, и вертикальными гидроподъемника ми с установленными на их штоках гор зонтальными площадками, вьшолненных с продольными пазами,в которыезаходят вилочные захваты, при этом неподвижная металлоконструкция выполне на двухъярусной, на наклоньгых балках которой установлены регулируемые по высоте опоры,; а опорные роли ки установлешл на штоках гидроцшгинд ров. На фиг.1 изображено устройство для перегрузки штучных грузов; на фиг.2 - то же, поперечное сечение. Устройство для перегрузки штучных грузов включает в себя гндроцилиндры перемещения 1 и 2, гндродомкраты 3 и 4, основание 5, подвижные рамы 6 и 7, перемещающие поддоны 8 с грузами 9, Подвижнью рамы 6 и 7 перемещаются по опорным роликам 10 укрепленных на штоке гидродомкратов 3 и 4. Неподвижная рама состоит из стоек, жестко связанных наклонными продольными балками 11-14. Балки 13 и 14 имеют ступенчатую поверхность, На которой находятся поддоны 8 и грузы 9, Гидроцилиндры перемещения 1 и 2 укреплены шарнирно в кронштейнах 15 и 16, жестко установленных на регулируемых по высоте опорах 17,укрепленных на наклонных продольных балках 11 и 12. Гидрощшиндры перемещения 1 и 2 связаны с подвижными рамами 7 и 6 через шарниры в й; $6нштейнах 18 и 19. Гидродомкраты 3 и 4 жестко установлень на регулируемых по высоте опорах 20 и 21, укрепленных на продольных балках 11 и 12. Смещение рам 6 и 7 в поперечном направлении исключают ролики 22. Для передачи поддонов 8 с грузами 9 с Нижнего яруса на верхний и наоборот служат вертикальные гидроподъемники левый 23 и правый 24, на конце штоков которых жестко укреплены горизонтальные площадки 25 и 26 с прорезями. Подвижные рамы 6 к 7 имеют консольные вилочные захваты 27 и 28, входящие в продольные прорези горизонтальных площадок 25 и 26 для снятия поддонов 8 с грузами 9 или установки поддонов 8 на площадки 25 и 26. Устройство для перегрузки штучных грузов работает следующим образом. При одновременном включении гидродомкратов 3 и 4 подвижные рамы 7 и 6 поднимаются и снимают при помощи вилочных захватов 27 и 28 поддоны 8 с грузами 9 с горизонтальных площадок 25 и 26 вертикальных гидроподъемников 23 и 24. При этом подвижные . рамы 6 и 7 снимают поддонник с грузами, находящимися на ступеньках продольных балок 13 и 14 основания 5. В верхнем положении рамы 6 и 7 нажимают на конечные выключатели (не показаны).которые дают импульс на включение гидрохдапиндров перемещения 1 и 2. Гидроцилиндр перемещения 2 перемещает раму 6 с поддонами 8 и грузами 9 на один шаг вперед-вправо к вертикальному гидроподъемнику 24, а гидроцилиндр перем щения 1 перемещает раму 7 с поддонами 3 на один шаг вперед-влево к вертикальному гидроподъемнику 23, т.е. на одну ступеньку. В этом поло жении конечный выключатель дает импульс на опускание подвижных рам 6 7. Все изделия одновременно устанав ливгиотся на соседние относительно предшествующего положения ступеньки. При этом поддон 8, находящийся на раме 7, устанавливается на горизонтальной площадке 26 вертикального гидроподъемника 23, а по дон с грузом 9 устанавливается на горизонтальной площадке 25 вертикального гидроподъемника 24, так ка верхний уровень горизонтальных площадок 25 и 26 совпадает с отметкой горизонтального уровня продольн балок 13 и 14. Конечный выключатель (не показан) дает импульс на обратньш ход подвижных рам 6 и 7. Цикл работы устройства работы повторяется. Многоярусное устройство для перегрузки штучных грузов позволя ет работать Б противоположном направлении, т.е. производить загруз684ки рамы 7 изделиями, с помощью правого вертикального гидроподъемника, 24, а разгрузку - с помощью левого вертикального гидроподъемника 23. Таким образом, изделия с шагом Т можно перемещать с одной отметки, расположенной на высоте Hj , на другую отметку на высоту Н и, наоборот, перемещать грузы с отметки Н на отметку И . Устройство может работатьв наладочном, полуавтоматическом или автоматических режимах. В многоярусном устройстве для перегрузки штучных грузов сокращается количество обслуживающего персонала, увеличивается производительность, уменьшается металлоемкость конструкции, обеспечивается высокая степень точности загрузки и разгрузки различных подъемнотранспортных машин, осуществляется . непрерывное, автоматическое транспортирование грузов в соответствии с технологическим процессом. По сравнению с известными двухъярусными шагающими конвейерами горизонтального типа время на транспортировку . груза с одной отметки уровня поверхности на другую уменьшается в 1,72,0 раза, чем достигается значительное увеличение производительности, а также значительное сокращение производственной площади цеха, примерно на 40-50%,
ч:
I .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки штучных грузов | 1980 |
|
SU889604A1 |
| Устройство для ступенчатого перемещения штучных грузов | 1982 |
|
SU1089042A1 |
| ПРИЖИМНОЕ УСТРОЙСТВО К ВИЛОЧНОМУ ПОГРУЗЧИКУ | 1991 |
|
RU2009994C1 |
| ГИДРОПОДЪЕМНИК | 2006 |
|
RU2333148C2 |
| УСТРОЙСТВО для МОНТАЖА ТЯЖЕЛОВЕСНОГО ПОДЪЕМНО-ТРАНСПОРТНОГО ОБОРУДОВАНИЯ | 1970 |
|
SU267865A1 |
| Погрузчик | 1979 |
|
SU893844A1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
| Устройство для обжатия материалов | 1989 |
|
SU1722870A1 |
| Крановый вилочный захват для погрузки штабелей штучных грузов | 1974 |
|
SU533541A1 |
| Трюмный погрузчик | 1956 |
|
SU109132A1 |
УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ ШТУЧНЫХ ГРУЗОВ, содержащее основаине, иа наклонных балках которого установлены две подвижные рамы, связанные с механизмами их перемещения в горизонтальной и вертикальной плоскостях, при этом подвижные рамы и поверхность основания имеют ступенчатую форму с одинаковым шагом ступенек, отличающееся тем, что, с целью уменьшения металлоемкости устройства и экономии производственной площади цеха, оно снаб-« жено регулируемыми по высоте опорами, на которых смонтированы упомянутые механизмы перемещения подвижных рам в горизонтальной и вертикальной плоскостях, вьтолненные соответственно с гидроцилиндрами и гидродомкратами, опорными роликами, на которых установлены подвижные рамы, вилочными .захватами, которые смонтированы на консолях подвижных рам, и вертикальньп-1и гидроподъемниками с установлен1а1ми на их штоках горизонтальными площадками, выполненными с продольными пазами, в которые заходят вилочные захваты, при этом неподвиж(Л ная металлоконструкция выполнена двухъярусной, иа наклонных балках которой установлены регулируемые по высоте опоры, а опорные ролики установлены на штоках гидроцилиндров. 00 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| . | |||
