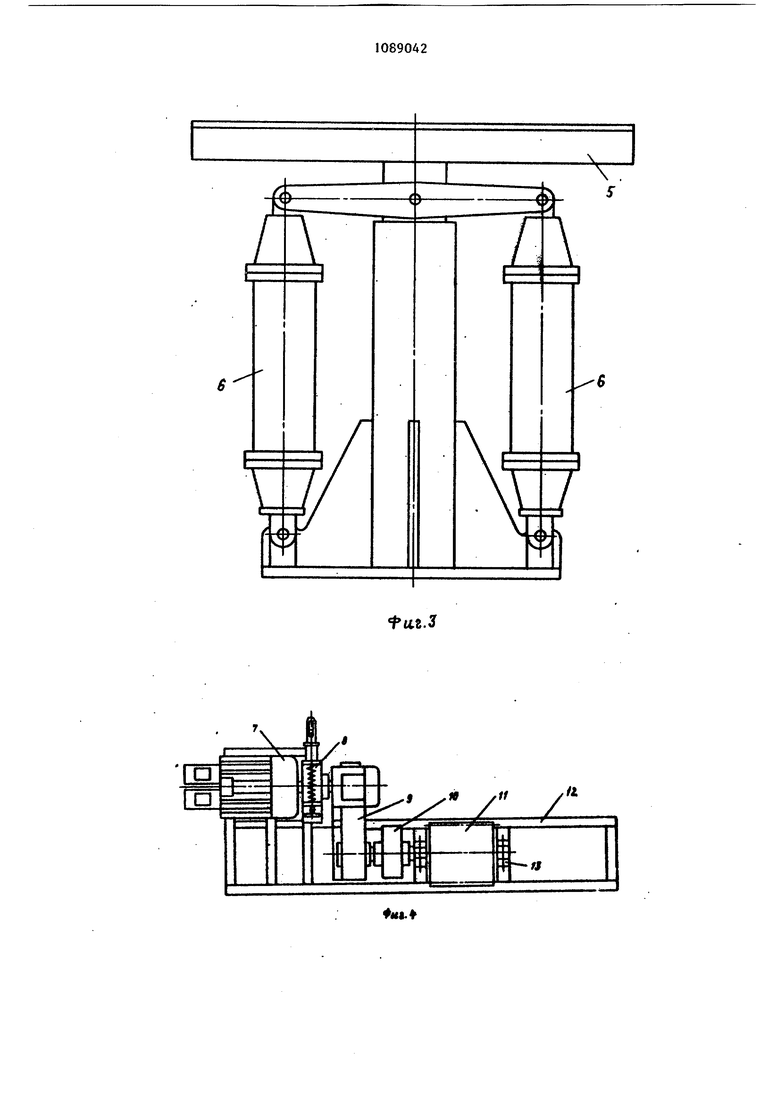
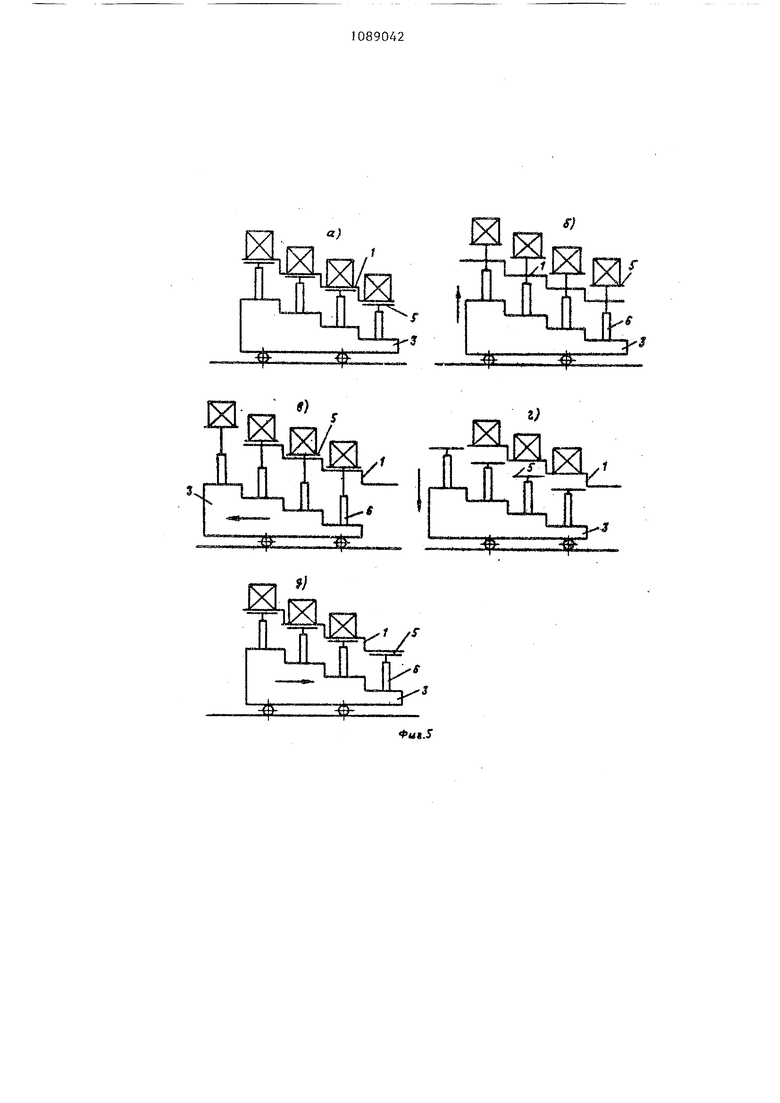
Изобретение относится к подъемнотранспортному машиностроению, в частности к устройствам для ступенчатого перемещения штучных грузов, и может быть использовано для межопе рационного наклонного транспортирования и накопления штучных грузов, а также для загрузки и разгрузки раз личного технологического и подъемнотранспортного оборудования в промышленности, сельском хозяйстве, на железнодорожном транспорте, в строительстве и в других отраслях народно го хозяйства. Известно устройство для ступенчатого перемещения штучных грузов, содержащее установленную на опорных роликах подвижную ступенчатую раму шагающего конвейера, связанную с механизмом его перемещения в горизонталькой плоскости и расположенную внутри неподвижной ступенчатой конструкции с одинаковым шагом ступенек при этом плоскость, проходящий через вершины этих ступенек, составляет с горизонтальной плоскостью углы 3 80 1. - Недостатком известного устройства являются невысокие его функциональны возможности,так как оно не обеспечи- . вает возможности накопления штучных грузов на нем самом вследствие того, что подвижная рама перемещает грузы на всех ступеньках одновременно. Цель изобретения - расширение функциональных возможностей устройства. Поставленная цель достигается ем что устройство для ступенчатого перемещения штучных грузов, содержащее установленную на опорных роликах под вижную ступенчатую раму шагающего конвейера, связанную с механизмом ег перемещения в горизонтальной плоскости и расположенную внутри неподвижной ступенчатой конструкции с одинаковым шагом ступенек, при этом плоскость, проходящая через вершины этих ступенек, составляет с горизонтально плоскостью ухлы 3 - ВО , снабжено грузовыми платформами, которые выполнены с силовыми цилиндрами для не зависимого вертикального перемещения и устанстлеиы на каждой ступеиьке подвижной рамы. На фиг, 1 изображено устройство дпя перегрузки штучных грузов; на фиг, 2 - то же, боковая проекция; на фиг, 3 - грузовая платформа устройства с механизмом подъема груза и пневмо- или гидроцилиндрами; на фиг, 4 - приводной механизм перемещения рамы устройства; на фиг. 5-7 положения платформ предлагаемого устройства при различных положениях грузов на нем в моменты их транспортировки и накопления. Устройство состоит из неподвижной ступенчатой конструкции I с жестко закрепленным JCQ ней механизмом 2 перемещения подвижной рамы 3, установленной на опорных роликах 4. Каждая ступенька указанной подвижной рамы выполнена в виде грузовых платформ 5 (фиг. 1 и 2) с пневмо- или гидроцилиндрами 6 (фиг. 3). Механизм перемещения указанной подвижной рамы устройства состоит из электродвигателя 7, соединенного с помощью тормозной муфты 8 с редуктором 9, который с помощью муфты 10 соединен с реечной шестерней I1, установленной на раме J2 в подшипниках 13 (фиг. 4). Неподвижная конструкция и подвижная рама 3 расположены так, что плоскости, проходящие через вершииы их ступенек, составляют с горизонтальной плоскостью углы 3 - во. Устройство для перегрузки штучных грузов работает в двух режимах: в режиме транспортироваиия грузов (фиг. 5); в режиме накопления грузов (фиг. 6 и 7), Рассмотрим работу устройства в режиме транспортирования штучных грузов (фиг, 5 o-g), В позиции а. все грузы находятся на неподвижной конструкции 1 (г, 1 а грузовые платформы 5 (фиг, 1} расположены под грузами с зазором 20 мм. После включення пневмо-. или гидрохщлиндров $ (фиг, 3) грузовые платформы 5 одновременно приходят в действие, снимают грузы с указанной неподвижной конструкции 1 и приподнимают их на 20 мм выше указанного неподвижного основания (фиг, 3).° Допустим, что- необходимо перемещать грузы снизу вверх . :(фиг, Зв), Дпя этого на пульте управления (не. показан) нажимается кнопка Вверх, При этом включается электродвигатель 7, который через тормозную муфту 8, редуктор 9 и муфту 10 приводит в движение реечную шестерню 1I, которая через рейку (не показана), жестко укрепленную на подвижной раме 3, осуществляет выполнение ее рабочего хода. В это время все трузовые платформы 5 с расположенными на них грузами находятся в верхнем положении. После следующего включения пневмоили гидроцилин,цров (фиг. 5г) грузовые платформы 5 (фиг. 1) опускаются и все грузы за исключением одного располагаются на указанной неподвижной конструкции (фиг. 5г), один груз с верхней грузовой платформы снимается краном (не показан). Затем снова включается электродвигатель 7 (фиг. 4) и подвижная рама 3 совершает холостой ход, возвращаясь в исходное положение (фиг. 5Э). При этом грузовые платформы 5 находятся в нижнем положении. Перемещение грузов сверху вниз аналогично работе устройства по перемещению снизу вверх, но в обратной последовательности, т.е. рабочий ход подвижной рамы 3 будет состоять из движения по горизонтали вперед, а ее холостой ход будет состоять из движения по горизонтшш назад. Подъем и опускание грузовых платформ 5 будет осуществляться в той же последовательности как при перемещении грузов снизу вверх. Рассмотрим работу устройства в режиме накопления штучных грузов (фиг. 6 и 76-0). На фиг, 6 первый и четвертьй грузы находятся на неподвижной конструкции 1 (фиг. 1), а грузовые платформы 5 расположены под грузами с зазором 20 мм. Пусть нам требуется поднять четвертый груз,не трогая пер-; вый груз. С этой целью включается механизм подъема четвертой платформы (фиг. 6ж) и четвертый груз снимается .с четвертой ступеньки указанной неподвижной конструкции. После включения электродвигателя 7 (фиг. 4) подвижная рама делает рабочий ход и ое-ремещает четвертый груз на следующую третью ступеньку (фиг. 6-3) неподвижной конструкции {фиг.1 ).Затем грузо вая платформа 5 опускается и четвертый груз перемещается на третью сту пеньку указанной неподвижной констру ции 1 (фиг, 6и). После включения электродвигателя 7 (фиг. 4) подвижная рама 3 (фиг. 1) совершает холостой ход, равный расстоянию между осями грузовых платформ 5 (фиг. 1), ;возвращается в исходное положение . 6к )) . Б этом положении указанные грузовые платформы находятся под грузами, которые установлены на первой и третьей ступеньках неподвижной конструкции 1 (фиг. 1)..Дпя передачи четвертого груза с третьей ступеньки На вторую снова включают грузовую платформу, находящуюся под четвертым грузом, и поднимают четвертый груз, снимая его с третьей ступеньки неподвижной конструкции (фиг, 6л). Затем включается электродвигатель и подвиж .ная рама совершает рабочий ход, |перемещая четвертый груз с третьей ступеньки на вторую (фиг. 7л). В этом положении включается механизм подъема под четвертым грузом, который, опускаясь, оставляет четвертый груз на второй ступеньке неподвижной конструкции 1 (фиг. 7н). Таким образом, происходит накопление грузов с -четвертой ступеньки на вторую ступеньку неподвижной конструкции. Затем подвижная рама 3 (фиг. 1) возвращается в исходное положение, т.е. совершает холостой ход (фиг. 7о). Накопление грузов возможно и при опускании грузов, например,с первой ступеньки на третью ступеньку указанной неподвижной конструкции. В этом случае направление движения указанной подвижной рамы изменяется, холостой ход рамы становится рабочим ходом, а рабочий ход - холостым. Таким образом, предлагаемое устройство может работать также в режиме реверса, накапливая при этом штучные грузы. 1 Пульт управления устройства, устанавливаемый на неподвижной конструкции, состоит из двух электромагнитных пускателей, имеющих группу контактов, предназначенных для реверсирования электродвигателя 7 (фиг. 4), и группу контактов рдя обеспечения блокировки его ротора от переключения в противоположное направление вращения ротора, а также снабжен предохранительными кнопками Вверх, Вниз и Стоп. Предлагаемое устройство может перемещать хрупкие и стеклянные зата-ренные грузы, при этом движение подвижной рамы устройства осуществляется по замкнутому прямоугольнику, что обеспечивает необходимую, точность подачи изделия со ступеньки на ступеньку. Неподвижная конструкция М (фиг. 2) и подвижная рама 3 (фиг. I) могут изменять конфигурацию рабочих поверхностей своих ступенек и грузовых
платформ при перемещении, например, круглых изделий, а также перегружать грузы непосредственно с пода«

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки штучных грузов | 1980 |
|
SU889604A1 |
| Устройство для перегрузки штучных грузов | 1983 |
|
SU1137068A1 |
| СПОСОБ ПЕРЕДВИЖЕНИЯ И УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ И ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2147537C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ТРАНСПОРТИРОВКИ ГРУЗОВ И ЛЮДЕЙ ПО ЛЕСТНИЦАМ И ПЛОСКОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2538408C1 |
| Шагающий конвейер | 1985 |
|
SU1240696A1 |
| Шаговый конвейер | 1978 |
|
SU734092A1 |
| Шагающий конвейер | 1980 |
|
SU935398A1 |
| Шагающий конвейер | 1976 |
|
SU697371A1 |
| УНИВЕРСАЛЬНАЯ ТЕЛЕЖКА | 2013 |
|
RU2552407C1 |
| Устройство для перегрузки штучных грузов | 1979 |
|
SU874501A1 |


УСТРОЙСТВО ДЛЯ СТУПЕНЧАТОГО ПЕРЕМЕЩЕНИЯ ШТУЧНЫХ ГРУЗОВ, содержащее установленную на опорных роликах подвижную ступенчатую раму-шагающего конвейера, связанную с механизмом его перемещения в горизонтальной плоскости и расположенную внутри неподвижной ступенчатой конструкции с одинаковым шагом ступенек, при этом плоскость, проходящая через вершины этих ступенек, составляет с горизонтальной плоскостью углы 3 80, отличающееся тем, что, с целью расщирения функциональных возможностей, оно снабжено грузовыми платформами, которые выполнены с силовыми цилиндрами для независимого вертикального перемещения и установлены на каждой ступеньке подвижной рамы. 00 со о 4 ьэ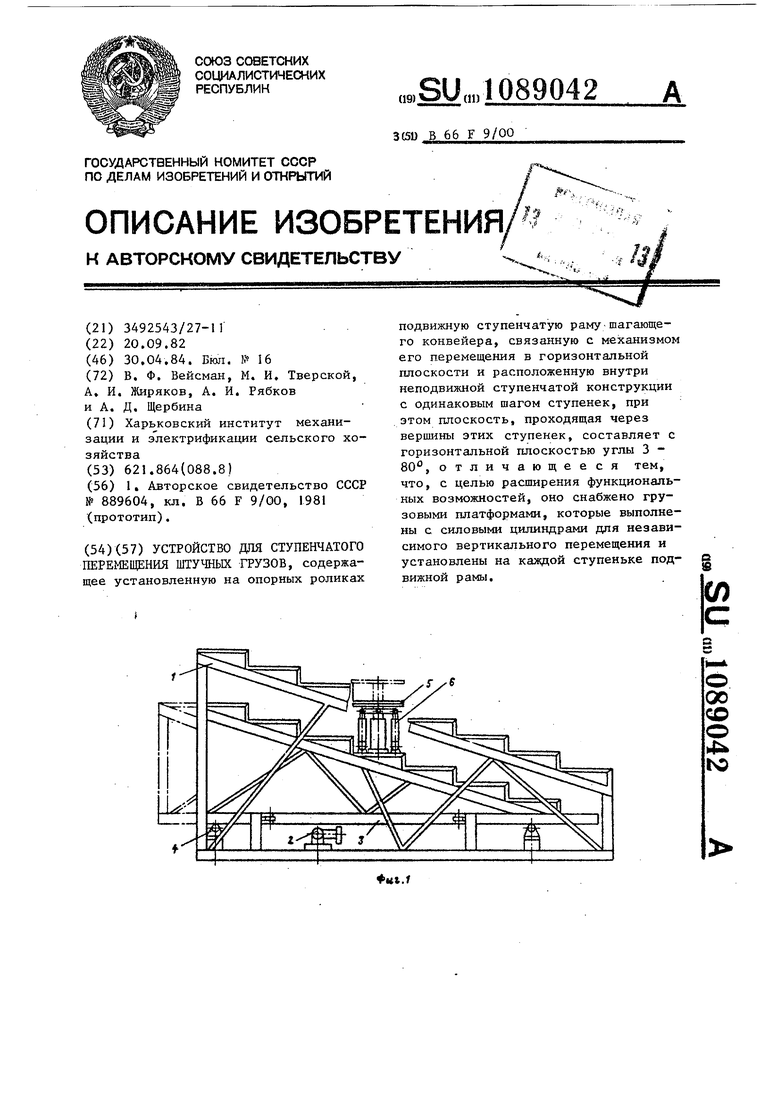
uz.t
J--
:
иг.З
9)
г)
Д
«;
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для перегрузки штучных грузов | 1980 |
|
SU889604A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
