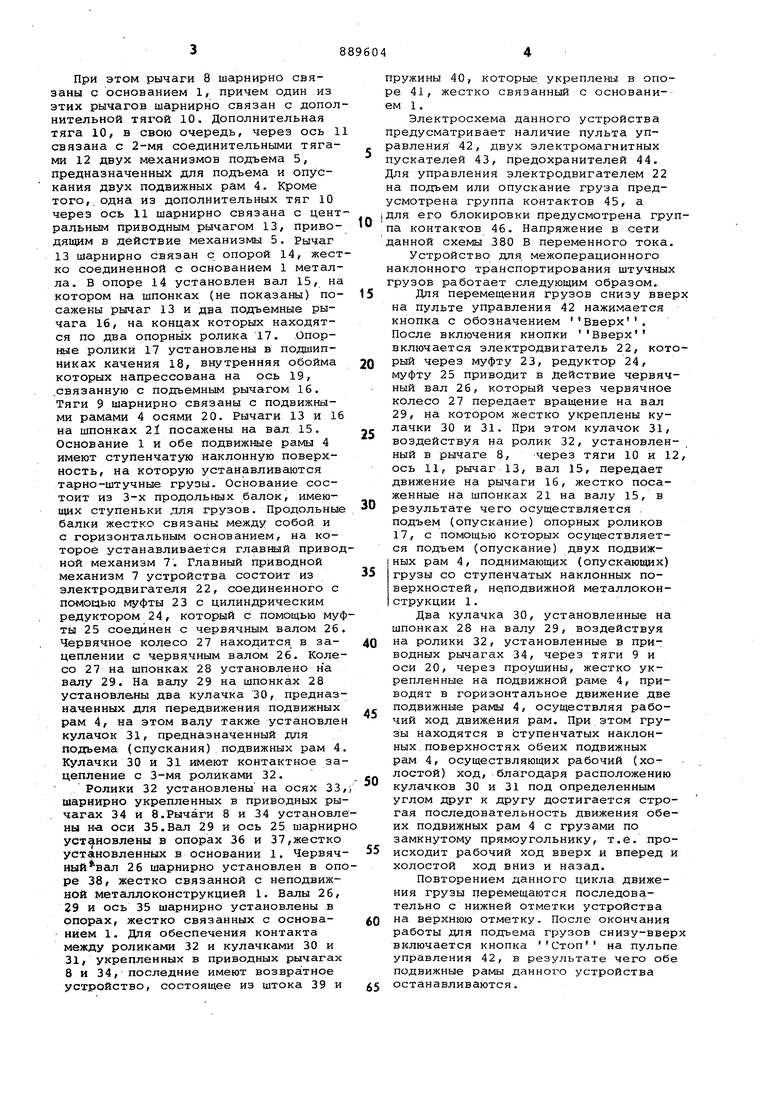
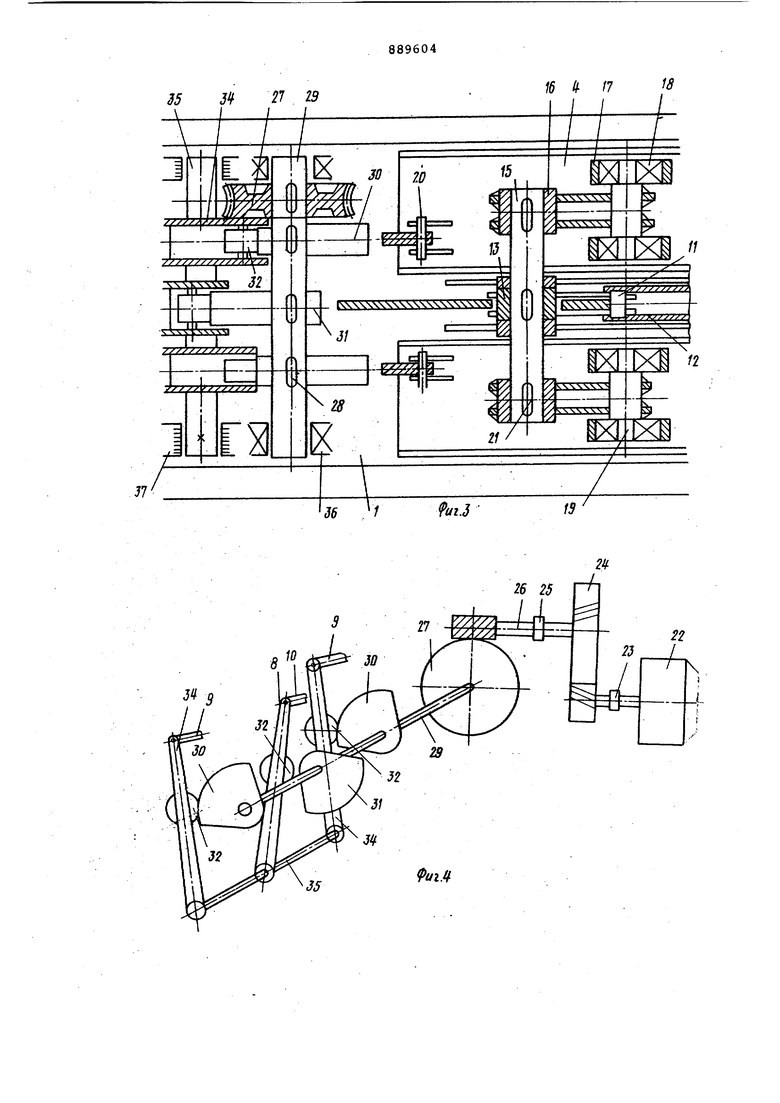
При этом рычаги 8 шарнирно связаны с основанием 1, причем один из этих рычагов шарнирно связан с дополнительной тягой 10. Дополнительная тяга 10, в свою очередь, через ось 11 связана с 2-мя соединительными тягами 12 двух механизмов подъема 5, предназначенных для подъема и опускания двух подвижных рам 4. Кроме того, одна из дополнительных тяг 10 через ось 11 шарнирно связана с центральным приводным рычагом 13, приводящим в действие механизмы 5. Рычаг 13 шарнирно связан с опорой 14, жестко соединенной с основанием 1 металла. В опоре 14 установлен вал 15, на котором на шпонках (не показаны) посажены рычаг 13 и два подъемные рычага 16, на концах которых находятся по два опорных ролика 17. .Опорные ролики 17 установлены в подшипниках качения 18, внутренняя обойма которых напрессована на ось 19, .связанную с подъемным рычагом 16. Тяги 9 шарнирно связаны с подвижными рамами 4 осями 20. Рычаги 13 и 16 на шпонках 21 посажены на вал 15. Основание 1 и обе подвижные рамы 4 имеют ступенчатую наклонную поверхность, на которую устанавливаются тарно-штучные грузы. Основание состоит из 3-х продольных балОк, имеюпдих ступеньки для грузов. Продольные балки жестко связаны между собой и с горизонтальным основанием, на которое устанавливается главный приводной механизм 7. Главный приводной механизм 7 устройства состоит из электродвигателя 22, соединенного с помощью 23 с цилиндрическим редуктором 24, который с помощью муфты 25 соединен с червячным валом 26. Червячное колесо 27 находится в зацеплении с червячным валом 26. Колесо 27 на шпонках 28 установлено на валу 29. На валу 29 на шпонках 28 установлены два кулачка 30, предназначенных для передвижения подвижных рам 4, на этом валу также установлен кулачок 31, предназначенный для подъема (спускания) подвижных рам 4. Кулачки 30 и 31 имеют контактное зацепление с 3-мя роликами 32.
Ролики 32 установлены на осях 33, шарнирно укрепленных в приводных ры. чагах 34 и 8.Рычаги 8 и 34 установлены на оси 35.Вал 29 и ось 25 шарнирн установлены в опорах 36 и 37,жестко установленных в основании 1. Червячный вал 26 шарнирно установлен в опоре 38, жестко связанной с неподвижной металлоконструкцией 1. Валы 2 6, 29 и ось 35 шарнирно установлены в опорах, жестко связанных с основа кием 1. Для обеспечения контакта между роликами 32 и кулачками 30 и 31, укрепленных в приводных рычагах 8 и 34, последние имеют возвра тное устройство, состоящее из штока 39 и
пружины 40, которые, укреплены в опоре 41, жестко связанный с основанием 1.
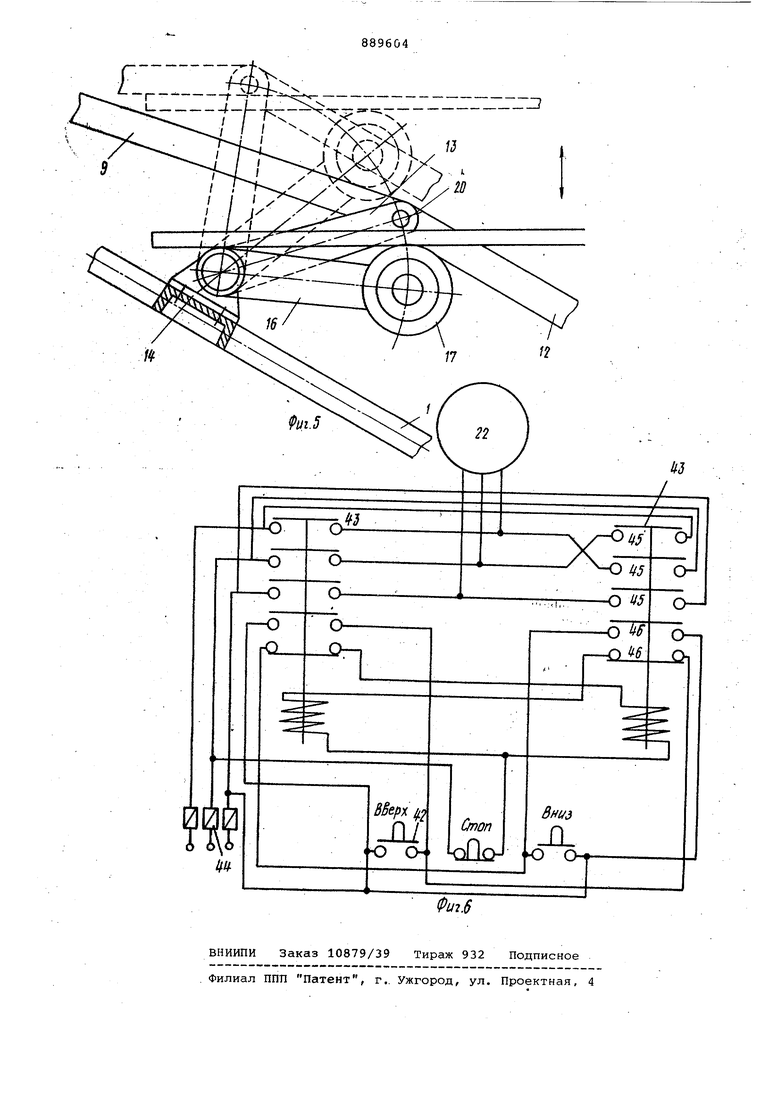
Электросхема данного устройства предусматривает наличие пульта управления 42, двух электромагнитных пускателей 43, предохранителей 44. Для управления электродвигателем 22 на подъем или опускание груза предусмотрена группа контактов 45, а iдля его блокировки предусмотрена група контактов 46. Напряжение в сети данной схемы 380 В переменного тока.
Устройство для межоперационного наклонного транспортирования штучных грузов работает следующим образом.
Для перемещения грузов снизу ввер на пульте управления 42 нажимается кнопка с обозначением Вверх. После включения кнопки Вверх включается электродвигатель 22, который через муфту 23, редуктор 24, муфту 25 приводит в Действие червячный вал 26, который через червячное колесо 27 передает вращение на вал 29, на котором жестко укреплены кулачки 30 и 31. При этом кулачок 31, воздействуя на ролик 32, установленный в рычаге 8, через тяги 10 и 12 ось 11, рычаг 13, вал 15, передает движение на рычаги 16, жестко посаженные на шпонках 21 на валу 15, в результате чего осуществляется . подъем (опускание) опорных роликов 17, с помощью которых осуществляется подъем (опускание) двух подвижных рам 4, поднимающих (опускающих) грузы со ступенчатых наклонных поверхностей, неподвижной металлоконструкции 1.
Два кулачка 30, установленные на шпонках 28 на валу 29, воздействуя на ролики 32, установленные в приводных рычагах 34, через тяги 9 и оси 20, через проушины, жестко укрепленные на подвижной раме 4, приводят в горизонтальное движение две подвижные рамы 4, осуществляя рабочий ход движения рам. При этом грузы находятся в ступенчатых наклонных поверхностях обеих подвижных рам 4, осуществляющих рабочий (холостой) ход, благодаря расположению кулачков 30 и 31 под определенным углом друг к другу достигается строгая последовательность движения обеих подвижных рам 4 с грузами по замкнутому прямоугольнику, т.е. происходит рабочий ход вверх и вперед и холостой ход вниз и назад.
Повторением данного цикла движения грузы перемещаются последовательно с нижней отметки устройства на верхнюю отметку. После окончания работы для подъема грузов снизу-ввер включается кнопка Стоп на пульпе управления 42, в результате чего обе подвижные рамы данного устройства останавливаются. Для перемещения грузов сверхувниз нажимается на пульпе управления 42 кнопка с обозначением Вниз. Вся последующая работа ус ройства для межоперационного наклон ного транспортирования штучных грузов аналогична работе устройства п перемещению грузов снизу-вверх,, но в обратной последовательности, т.е. рабочий ход подвижных рам состоит и движения по горизонтали - назад и п вертикали - вниз. Холостой ход обеи подвижных рам 4 состоит из движения по горизонтали - вперед и по вертикали - вверх. Согласно электросхеме электродви гатель 22 приводится, в действие дву электромагнитными пускателями 43, предназначенными для вращения ротора электродвигателя вправо и влево, обеспечивая при этом его реверсиров ние в зависимости от того, какой из пускателей 43 включен. Группой контактов 45 производится реверсирование электродвигателя 22, а группой контактов 46 обеспечивается блоки-, ровка электродвигателя от переключе ни я ротора электродвигателя на противоположное направление его вращения. Только нажав на кнопку Стоп на пульпе управления 42 и остановив двигатель, можно включать следующую кнопку, например, кнопку Вниз или Вверх. Если бы отсутствовала блокировка группой контактов 46, появлялся бы встречный электрический ток, что привело бы, к .короткому замыканию. Таким образом,, устройство может работать также в режиме реверса. Пульт управления 42, с помощью которогЬ можно управлять работой уст ройства, устанавливается на основаНИИ 1 . Пульт управления устройства, установленный на основании состоит из двух электромагнитных пускателей. имеющих группу контактов, предназначенных для реверсирования электродвигателя, и группу контактов для обеспечения блокировки ротора электродвигателя от переключения его в противоположное вращению ротора направление, а также снабжен предохранительными кнопками: Вверх, Вниз, и Стоп. Устройство может перемещать хрупкие и стеклянные затаренные грузы, при этом движение подвижных рам устройства осуществляется по замкнутому прямоугольнику, что обеспечивает необходимую точность подачи изделий со ступеньки на ступеньку. Основание и обе подвижные рамы могут изменять конфигурацию своих ступенек при перемещении, например, круглых изделий и перегружать грузы непосредственно с пола. Формула изобретения Устройство для перегрузки штучных грузов, содержащее установленное на ходовой части с поворотными вокруг вертикальной оси катками и аутриггерами основание, на поверхности которого установлен шагающий конвейер, состоящий из двух подвижных рам, связанных с механизмами их перемещения в горизонтальной и.вертикальной плоскостях, отл.ичающееся тем, что, с целью расширения функциональных возможностей, подвижные рамы и поверхность основания выполнены ступенчатой формы с одинаковым шагом ступенек и расположены таким образом, что плоскость, проходящая через вершины упомянутых ступенек, составляет с горизонталью угол от 3 до 80. . Источники информации, принятые во. внимание при экспертизе 1. Авторское свидетельство СССР о заявке 2761434/11,кл В 66 G 1/12 (прототип).
i j iK if f /ff fXy/X Mfy/.f
7фиг.1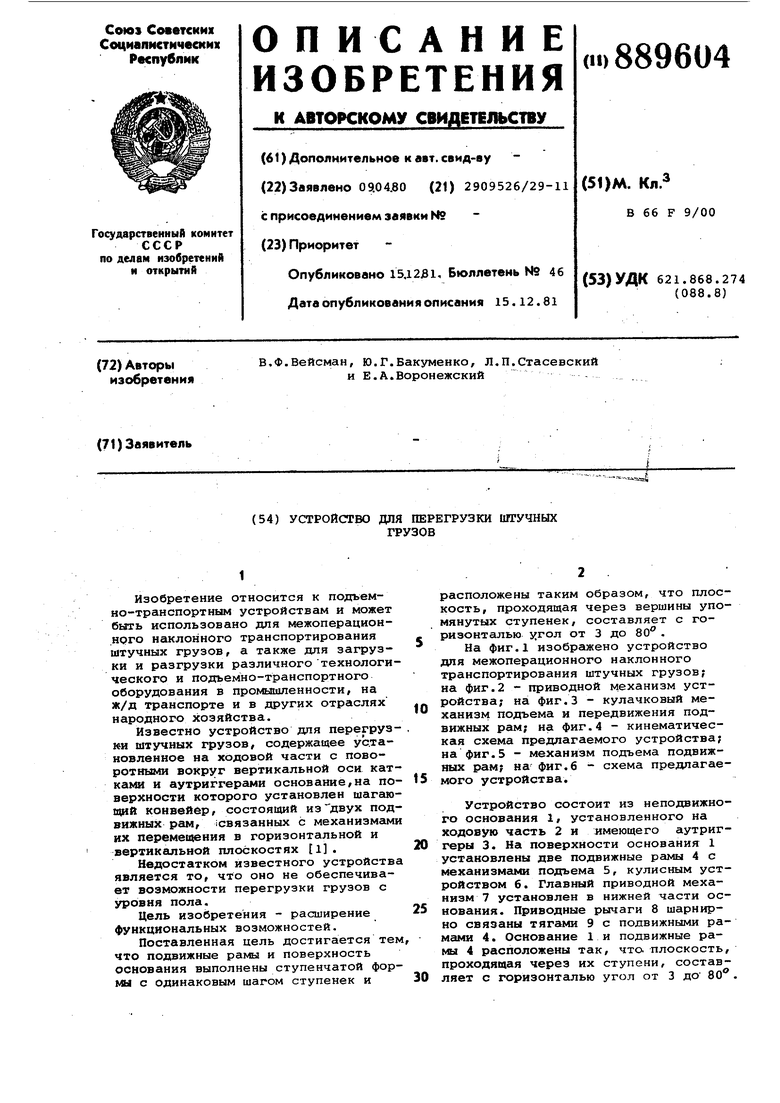
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для резки полотнищ тканых штучных изделий | 1961 |
|
SU147167A1 |
| Устройство для ступенчатого перемещения штучных грузов | 1982 |
|
SU1089042A1 |
| Устройство для перегрузки грузов на приемные конвейеры | 1988 |
|
SU1655874A1 |
| Механизированный многоярусный стеллаж | 1977 |
|
SU701872A1 |
| Устройство для правки на ребро штучных изделий из профиля переменного сечения | 1972 |
|
SU434681A1 |
| Грейферное устройство для подачи заготовок в пресс | 1987 |
|
SU1454551A1 |
| Механизм розыска "раза" к ткацкому станку | 1987 |
|
SU1509438A1 |
| АППАРАТ ИСКУССТВЕННОГО ДЫХАНИЯ ДЛЯ ДЕТЕЙ | 1967 |
|
SU214040A1 |
| Лифт переменной грузоподъемности | 1982 |
|
SU1049400A1 |
| Устройство для разборки пакета штучных грузов | 1985 |
|
SU1350089A1 |
38 Фиг.2 16 4 f E. .Л--р|.,™ /J л
