1
Известны пневматические следящие приводы, содержащие исполнительный механизм, сумматор, соединенный со входным каналом, и порщневой демпфер с дросселем, демпфирование в них осуществляется за счет пассивного демпфера, в котором полости соединены через дроссель.
Такая конструкция не обеспечивает достаточно высокой степени устойчивости.
Предложено устройство, отличающееся тем, что, с целью повыщения устойчивости, порщневой демнфер выполнен в виде измерительного порщневого исполнительного механизма, щток которого кинематически соединен с исполнительным механизмом привода. Полости измерительного исполнительного механизма соединены с плюсовой и минусовой камерами сумматора н через дроссели - с атмосферой.
Схема устройства приведена на чертеже.
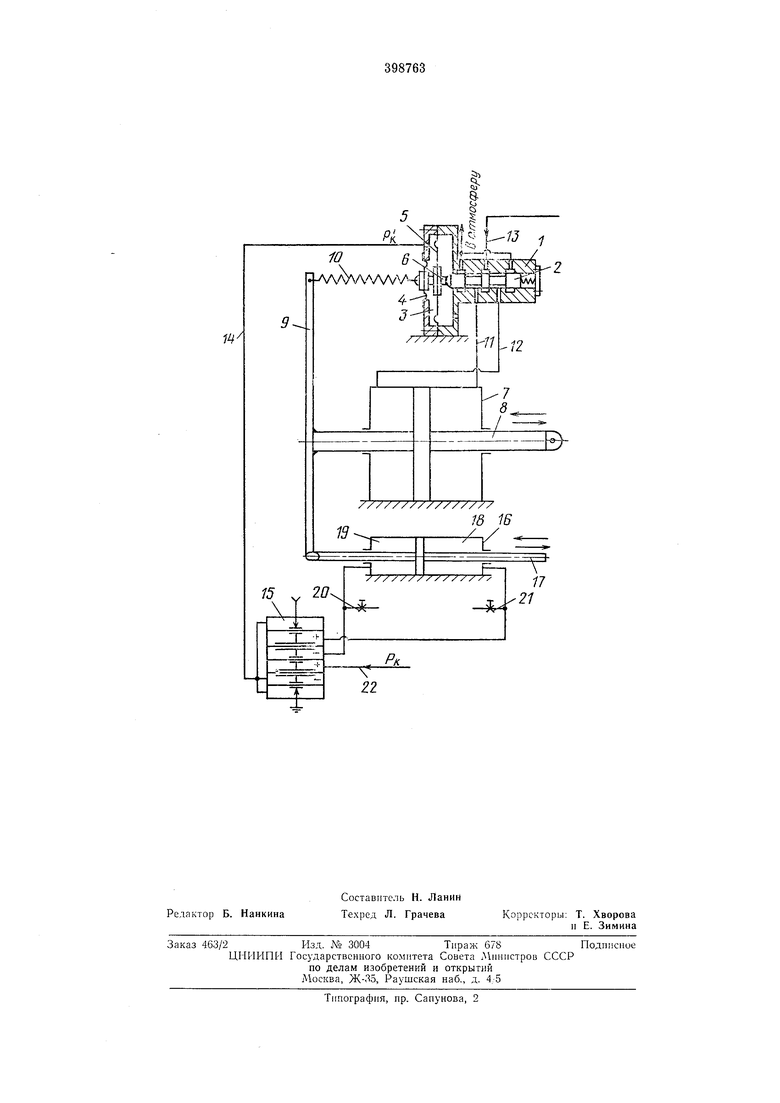
Пневматический привод содержит золотниковый усилитель 1 с золотником 2, мембранным блоком 3, образованным мембранами 4 и 5 с разными эффективными площадями, соединенными жестким центром 6, и исполнительный силовой механизм 7 со щтоком 8, жестко связанным с кронщтейном 9.
Золотниковый усилитель 1 и механизм 7 охвачены жесткой отрицательной обратной связью по перемещению щтока 8 с силовой комненсацией. Пружина 10 обратной связи
является датчиком перемещения щтока 8 и связывает кронщтейн 9 с мембранным блоком 3. Коммуникационными каналами И и 12 усилитель связан с механизмом 7 с каналом питания 13 и каналом 14 - с сумматором 15. Поршневой демпфер состоит из измерительного иорщневого иснолнительного механизма 16 со штоком 17, кинематически связанным с кронщтейном 9.
Проточные полости 18 и 19 измерительного механизма 16 соединены с атмосферой через дроссели 20 и 21 и с камерами сумматора 15. Сумматор предназначен для коррекции командного сигнала Я по величине перепада
давлений в нолостях 19 и 20.
Входной командный сигнал Р,; подается в плюсовую камеру сумматора но каналу 22, а выходной скорректированный сигнал Рк - в камеру мембранного блока 3 усилителя 1. Устройство работает следующим образом. Если командный сигнал РК имеет постоянное неизменное значение, мембранный блок 3 усилителя 1 находится в равновесии под действием давления воздуха Я ,; и усилия пружины 10 обратной связи. Золотник 2 перекрывает каналы 11 н 12. Шток 8 исполнительного механизма 7 неподвижен. В этом случае перепад давлений в нолостях 18 и 19 равен О и соблюдается равенство: .
При изменении командного сигнала Рк (например, при увеличении при прямом ходе) изменяется сигнал Рк (увеличивается). При изменении Рк равновесие мембранного блока 3 нарушается вследствие того, что эффективная площадь мембраны 5 больше эффективной нлошади мембраны 4. Жесткий центр б мембранного блока 3 с золотником 2 переместится вправо. Воздух из канала питания 13 через золотник 2 проходит в правую полость механизма 7, а из левой полости - в атмосферу. Шток 8 с кронштейном 9 начнет перемещаться влево, растягивая иружину 10. При растяжении пружины 10 будет происходить уравновешивание мембранного блока 3.
Одновременно с этим при движении штока
17в полостях 18 и 19 произойдет изменение давления.
При движении штока 17 влево давление в полости 19 увеличится и установится пропорциональным скорости движения, а в полости
18- соответственно уменьшится. Командный сигнал Рк на выходе сумматора 15 будет меньше сигнала РК на величину перепада давлений в полостях 18 и 19. Упомянутая коррекция сигнала РК по величине скорости движения исполнителыгого механизма 7 обеспечит более быстрое затухание переходного процесса уравновешивания мембранного блока 3 и уменьшит динамическую ошибку перемещения штока 8.
Степень демпфирования пневмопривода можно регулировать величиной переменных сопротивлений дросселей 20 и 21.
Предмет изобретения
Пневматический следящий привод, содержащий исполнительный механизм, подключенный через золотниковый усилитель к выходу сумматора, соединенного со входным каналом, и поршневой демпфер с дросселем, отличающийся тем, что, с целью повышения устойчивости устройства, норшневой демпфер
выполнен в виде измерительного поршневого исполнительного механизма, шток которого кинематически соединен с исполнительным механизмом привода, а полости соединены с плюсовой и минусовой камерами сумматора и
через дроссели - с атмосферой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический следящий привод | 1983 |
|
SU1137257A1 |
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С КОМБИНИРОВАННЫМ РЕГУЛИРОВАНИЕМ СКОРОСТИ ВЫХОДНОГО ЗВЕНА И КЛАПАНОМ ДЕМПФИРОВАНИЯ | 2011 |
|
RU2483978C2 |
| Пневматический следящий привод | 1985 |
|
SU1249207A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ КАСКАДА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ (ВАРИАНТЫ) | 2000 |
|
RU2191908C2 |
| Устройство для управления силовыми гидравлическими цилиндрами | 1975 |
|
SU699238A1 |
| УСТРОЙСТВО ДЛЯ НАГНЕТАНИЯ КРОВИ | 1972 |
|
SU419223A1 |
| РЕГУЛЯТОР ДАВЛЕНИЯ | 1993 |
|
RU2037183C1 |
| Силовой цилиндр | 1982 |
|
SU1052745A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ | 1969 |
|
SU241137A1 |
| Гидравлический распределитель | 1982 |
|
SU1125422A1 |