(21)4338669/24-Ю
(22)08.12.87
(46) 15.06.90. Бюл. № 22
(71)Запорожский филиал Всесоюзного научно-исследовательского и конструкторского института Цветметавтоматика
(72)А.Е.Липман, А.И.Шапиро, А.С.Кукуй А.Н.Замотаев
и Б.Л.Серебрянников
(53) 681,269 (088.8)
(56) Авторское свидетельство СССР
№ 1183839, кл. G 01. G 19/03, 1985.
(54) УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ АВТОМОБИЛЕЙ В ДВИЖЕНИИ
(57) Изобретение относится к весоизмерительной технике и позволяет повысить точность взвешивания автомобилей в движении. Измеренный силоизмеритель- ным датчиком 2 сигнал веса движущегося автомобиля, полностью расположенного на платформе 1, дополняется участками, извлеченными из сигналов силоизмерительного датчика 2, измеренных при прохождении через платформу 1 отдельно каждой из осей автомобиля, 3 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поосного взвешивания вагонов в движении | 1985 |
|
SU1278603A1 |
| Устройство для взвешивания движущихся объектов | 1984 |
|
SU1183839A1 |
| Устройство для взвешивания движущихся объектов | 1984 |
|
SU1273745A2 |
| Устройство для взвешивания движущихся объектов | 1985 |
|
SU1288506A1 |
| Устройство для взвешивания движущихся объектов | 1990 |
|
SU1789877A1 |
| Микропроцессорная весоизмерительная система | 1981 |
|
SU1078255A1 |
| Устройство для взвешивания железнодорожных вагонов в движении | 1987 |
|
SU1474475A1 |
| Система для весового учета жидкого чугуна | 1988 |
|
SU1583750A1 |
| Устройство для взвешивания автомобилей в движении | 1987 |
|
SU1432340A1 |
| Весовое устройство | 1986 |
|
SU1500847A1 |
Изобретение относится к весоизмерительной технике и позволяет повысить точность взвешивания автомобилей в движении. Измеренный силоизмерительным датчиком 2 сигнал веса движущегося автомобиля, полностью расположенного на платформе 1, дополняется участками, извлеченными из сигналов силоизмерительного датчика 2, измеренных при прохождении через платформу 1 отдельно каждой из осей автомобиля. 3 ил.
J&№i&
СП.
v|
Фиг.1
Изобретение относится к весоизмерительной технике и может быть использовано для взвешивания автомобилей во время их движения в промьшшен- ных условиях,
Цель изобретения - повышение точности устройства,
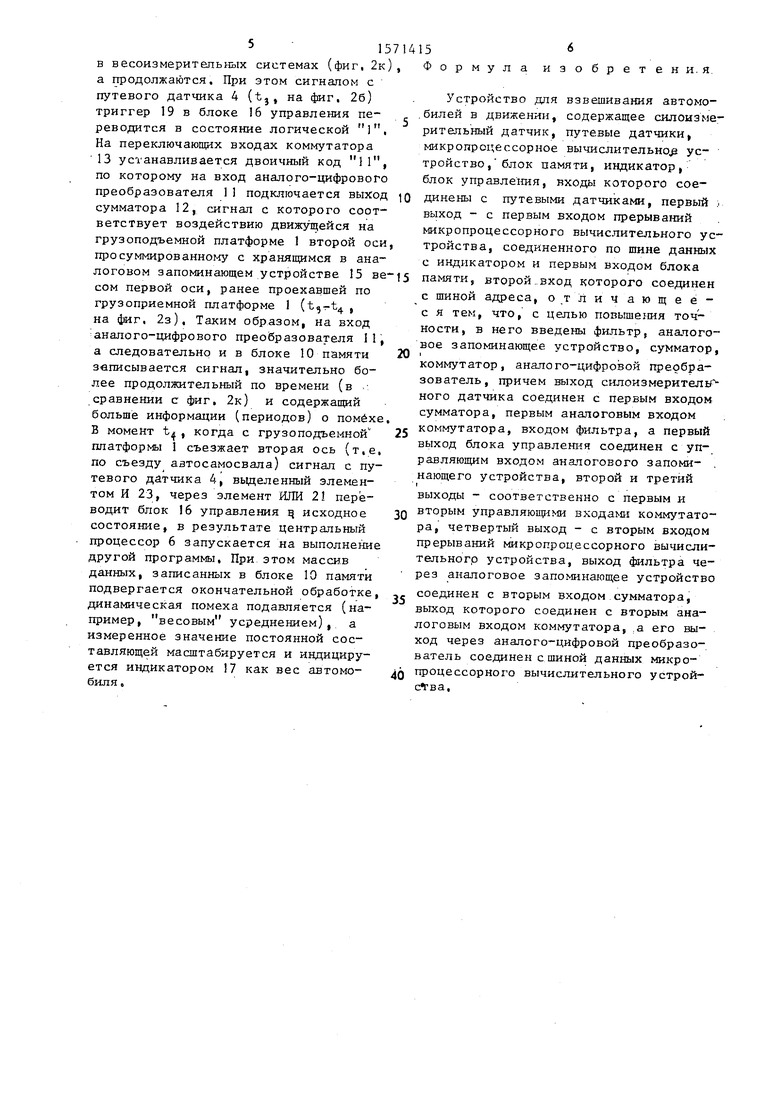
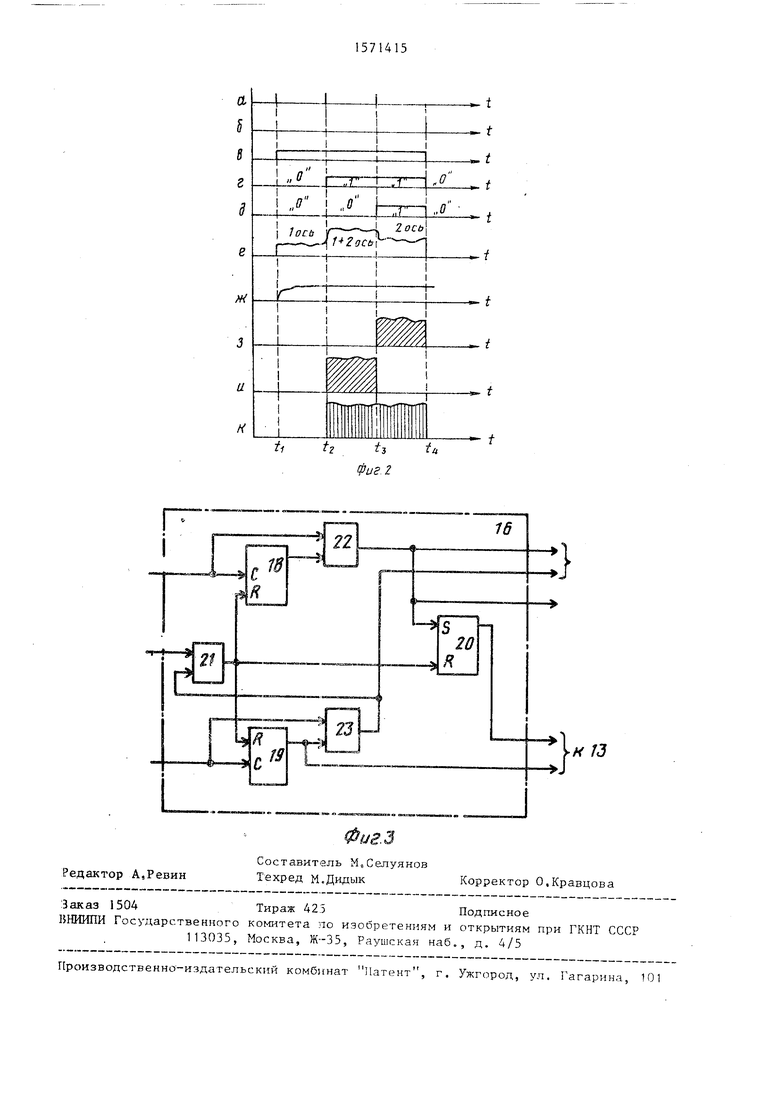
На фиг, 1 изображена блок-cxe-ia предлагаемого устройства для взнешивз- ния большеГ рузных автосакосвалоя в карьере; ка фиг, 2 - временные диаграммы, иллюстрирующие работу устройства} на фиг, 3 - блок управлении
Устройство содержит грузоприемкую платформу 1 с силоизмерителыгым Л и путевыми 3 и 4 датчиками, микропроцессорное вычислительное устройство
5,содержащее центральный процессор
6,постоянное запоминающее устройство
7,устройство 8 управления и синхронизатор 9« По шинам данных и адрес.i микропроцессорное вычислительное устрой ство 5 связано с блоком 10 памяти,
а по шинам данных (ШД) - с знало го- цифровым преобразователем 11, Силоиз- мерительный датчик 2 подключен к первому вхогу сумматора 121 к первощ аналоговому входу коммутатора 13 и через фильтр 14 - к аналоговому с an о- пинающему устройству 15, иыход которого соединен со вторым входом сумматора 12,
Первый выход блока 16 у-грачлег-ия соединен с первым входом кй микропроцессорного вычислитегъгого устройства 5, с управляющим входем аналогового запоминающего устройства 159 а второй- выход блока 16 упраглекч соединен со вторым входом прерываний микропроцессорного вычислительною устройства 5С Выход сумматор;1 12 подключен к второму аналоговому вхору коммутатора 13В первые я вторые управляющие вхо.цы которого соединены со вторым у- третьим выходами блока 16 управления,, а выход коммутатора S3 - с входом аналого-цифрового преобразователя .i1, Два входа блока 16 управления подключены к путевым датчикам 3 и 4 соответственно, а вход Сброс является внешним входом исходной установки устройства. Микропроцессорное вычислительное устройство 5 по шине данных соединено с индикатором 17. Блок 16 управления содержит два счетных триггера 18 и 19 и один RS- триггер 20, элемент ИЛИ 2 и элементы И 22 и 23
i
Q
С
Ь
З
Устройство работает следующим образом.
Перед взвешиванием сигналом Сброс (например, с пульта управления) устройство приводится Е исходное состояние (триггеры в блоке 16 управления устанавливаются в состояние логического О). При наезде на грузоприемную платформу 1 первой по ходу движения оси автосамосвала срабатывает путевой датчик 3 (момент t,, , на фиг, 2а) , перзвоця триггео 18 (фиг« 3) в состояние логической 1,Усилие от первой оси, передаваемое силоизмерительным датчиком 2, поступает через фильтр 14 фильтр низких частот) на вход аналогового запоминающего устройства 15, При этом в сигнале частично подавляет- :я динамическая помеха,, а значение постоянной составляющей, выделяемой ча выходе фильтра 43 близко к массе первой оси (m; t,-t на фиг, 2), По наезду второй оси и второму срабатыванию путевого датчика 3 (t2 на фиг,.2а), соответствующий импульс, проходя че- тэез открытый элемент И 22 блока 16, ключает аналоговое запоминающее устройство 1 5s устанавливая ЕЗ-триггер 20 в состояние логической :, и поступает на вход прерывания микропроцессорного вычислительного устройства 5, то приводит к тому, что в аналоговом запоминающем устройстве 15 запоминается значение сигнала, близкое к несу первой оси, управляющие входы коммутатора устанавливаются в логическое состояние 10, подключая выход с.илсизмерительного датчика 2 к входу аналого-цифрового преобразователя i1, в результате чего центральный процес- ор 6 в микропроцессорном вычислительном устройстве 5 переводится испол- псьие программы, предварительно записан; ой в постсявтм запоминающем ус- гъойстве 7 (момент t2 на фиг, 2), По : гой программе кодовые значения сигнала аналого-цифрового преобразователя 1 1 , соответствующие снгкалу с сило- измерительного датчика 2 о возденет- г-чи массы целого авто самосвал-, (обеих осой), движущегося по грузоподъемной ьлатформе ь опрашиваются центральным процессором б и заносятся в ячейки 5лока 10 памяти (t4-t3, ьа фих ,, 2е и фиг, 2к), По съезду первой оси с грузоподъемной платформы Iв когда по ней твижется вторая ось, измерения не превращаются, как это обычно имеет место
515
в весоизмерительных системах (фиг, 2к) а продолжаются. При этом сигналом с путевого датчика 4 (Ц, на фиг. 2б) триггер 19 в блоке 16 управления пе- реводится в состояние логической 1, На переключающих входах коммутатора 13 устанавливается двоичный код 11, по которому на вход аналого-цифрового преобразователя 11 подключается выход сумматора 12, сигнал с которого соответствует воздействию движущейся на грузоподъемной платформе 1 второй оси просуммированному с хранящимся в аналоговом запоминающем устройстве 15 ве сом первой оси, ранее проехавшей по грузоприемной платформе 1 (t9-t4 , на фиг, 2з), Таким образом, на вход аналого-цифрового преобразователя 11, а следовательно и в блоке 10 памяти записывается сигнал, значительно более продолжительный по времени (в сравнении с фиг, 2к) и содержащий больше информации (периодов) о помехе В момент tt , когда с грузоподъемной платформы 1 съезжает вторая ось (т.е. по съезду автосамосвала) сигнал с путевого датчика 4, выделенный элементом И 23, через элемент ИЛИ 21 переводит блок 16 управления в, исходное состояние, в результате центральный процессор 6 запускается на выполнение другой программы, При этом массив данных, записанных в блоке 10 памяти подвергается окончательной обработке, динамическая помеха подавляется (например, весовым усреднением), а измеренное значение постоянной составляющей масштабируется и индицируется индикатором 17 как вес автомо- биля о
15
Формула изобретения
Устройство для взвешивания автомобилей в движении, содержащее силоизмерительный датчик, путевые датчики, микропроцессорное вычислительно устройство, блок памяти, индикатор, блок управления, входы которого соединены с путевыми датчиками, первый . выход - с первым входом прерываний микропроцессорного вычислительного устройства, соединенного по шине данных с индикатором и первым входом блока памяти, второй вход которого соединен с шиной адреса, отличающее- с я тем, что, с целью повышения точности, в него введены фильтр, аналоговое запоминающее устройство, сумматор, i
коммутатор, аналого-цифровой преобразователь, причем выход силоизмерительг- ного датчика соединен с первым входом сумматора, первым аналоговым входом коммутатора, входом фильтра, а первый выход блока управления соединен с управляющим входом аналогового запоминающего устройства, второй и третий
выходы - соответственно с первым и вторым управляющими входами коммутатора, четвертый выход - с вторым входом прерываний микропроцессорного вычислительно гр устройства, выход фильтра через аналоговое запоминающее устройство
соединен с вторым входом сумматора, выход которого соединен с вторым аналоговым входом коммутатора, а его выход через аналого-цифровой преобразователь соединен с шиной данных микропроцессорного вычислительного устройства,
ч.
