Изобретение относится к весоизмерительной технике и предназначено для взвешивания движущихся объектов - автомобилей, железнодорожных вагонов и т.д.
Известны устройства для взвешивания движущихся объектов, содержащие грузоприемную платформу, датчик веса, блок управления и регистрации , принцип действия- которых основан на интегрировании в течении времени измерения Т электрического сигнала, частота которого пропорциональна приложенной к датчику веса нагрузке 1.
Недостаток устройств такого типа - сравнительно большое время взвешивания.
Наиболее близким к изобретению по технической сущности является устройство для взвешивания движущихся объектов, содержащее грузоприемную платформу, частотный датчик веса, измеритель скорости, блоки деления частоты, генератор эталонной частоты, схему совпадения, связанную с формирователем времени взвешивания и интегрирующим счетииком 2.
Недостаток такого устройства сравнительно большая ошибка измере НИН, возникающая при повышении скорости движения взвешенного объекта
Цель изобретения - повышение. точности взвешивания.
Эта цель достигается тем, что устройство снабжено формирователем командных-импульсов и путевым датчи10ком, о.цин из выходов формирователя командных импульсов соединен со входом измерителя скорости, а другой выход подк-лючен к управляющему входу формирователя времени взвешива15ния, а вход формирователя командных импульсов соединен с путевым датчиком, установленным в начале грузоприемной платформы.
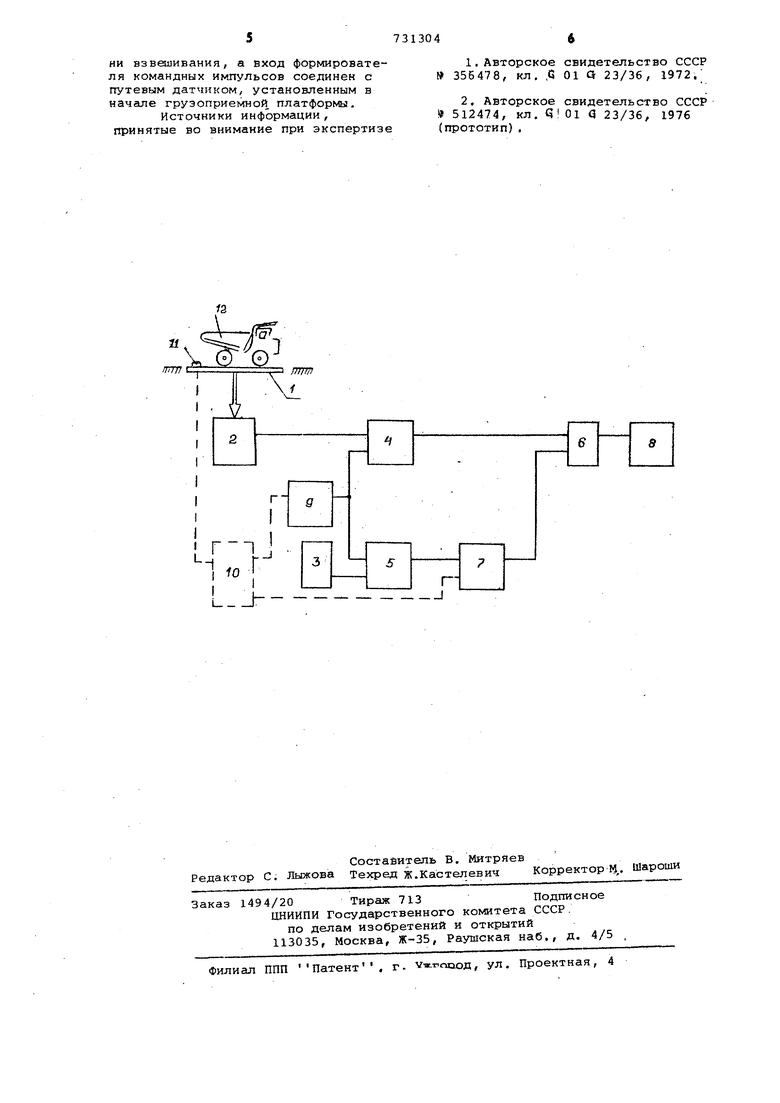
На чертеже представлена блок-схе2Qма устройства дйя взвииивакия движущихся объектов.
Устройство для взвешивания движущихся объектов содержит грузоприемную платформу 1, опирающуюся на
25 частотный датчик 2 веса, генератор 3 эталонной частоты, блоки 4 и 5 деления частоты, схему 6 совпадения связанную с формирователем 7 времени взвешивания и интегрирующим счет
30
чиком 8, измеритель 9 скорости ..формирователь 10 командных импульсов и пу-тевой датчик 11, вырабатывающий сигнал запуска при прохождении над ним взвешиваемого объекта.
Предлагаемое устройство предусматривает два режима работы: нормальный и ускоренный. В режиме нормального взвешивания производится взвешивание автомобиля 12, движущегося по грузоприемной платформе 1 с допустимой скоростью, т.е. такой скоростью, которая определяется принятым временем измерения и длиной грузоприемной платформы 1, Для получения достаточной точности взвешивания время измерения принимается кратным наиболее вероятному периоду динамической .помехи {дк намическая помеха - это помеха в сигнале датчи са веса, вызванная колебаниями грузоприемной rшaтфop ы и движущегося объекта).
После того, как передние колеса автомобиля 12 въедут на грузоприемную платформу 1, срабатывает путевой датчик 11, по сигналу которого формирователь 10 командных импульсов вырабатывает импульс Конт:роль скорости ,3anyекающий измеритель 9 скорости,По задним колесам автомобиля 12 (автомобиль полностью выехал на платформу) .путевой датчик 11 срабатываеэт повторно. При этом формирователь 10 командных импульсов снимает Контроль скорости и измерение скорости движения автомобиля прекращается. Одновременно на. формирователь 7 времени взвешивания подается управляющий импульс Начало взвешивания . Если скорость движения автомобиля V меньше допустимой Vgon , то по сигналу Начало взвешивания импульсы с выхода блока 5 , в котором осуществляется деление (например, на четыре) частоты сигнала генератора 3 эталонной частоты, начинают заполнять регистр времени формирователя 7 времени . взвешивания, В течение всего времени заполнения регистра с выхода формирователя 7 времени взвешивания на выход схемы б совпадения поступает разрешающий потенциал. При этом сигнал от датчика 2 веса через блок 4 деления частоты, в котором выполняется деление (например,на четыре) частоты датчика 2 веса,проходит на вход интегрирующего счетчика 8. После переполнения регистра времени формирователя 7 времени взвешивания снимается разрешаюпщй .потенциал на входе схемы 6 совпадения, и процесс взвешивания заканчивается. Количество импульсов, зафиксированное в интегрирующем счетчике 8, по окончании взвешивания оопордиональнр массе автомобиля 12
Если автомобиль 12 движется со скоростью V , превышающей допустимую Voon f измеритель 8 скорости выдает сигнал Скорость превышена , по которому в блоках 4 и 5 деления 1 частоты уменьшается коэффициент пересчета, что приводит к увеличению частоты сигнала на выходе этих блоков. Увеличение частоты сигнала на выходе блока 5 деления частоты,
д поступающего на регистр времени формирователя 7 времени взвешивания, вызывает сокращение времени взвешивания, т.е. уменьшение длительности разрешающего потенциала на входе схемы 6 совпадения.
В случае использования в рассматриваемом устройстве блока функциональной обработки сигнала датчика веса переключение блоков 4 и 5 деления частоты на режим ускоренного
0 взвешивания в момент, предшествующий началу измерения массы автомобиля, позволяет сократить время взвешивания, не нарушая симметричности весовой функции. Так как одновре5 менно с сокращением времени взвешивания происходит увеличение частоты сигнала на выходе блока 4 деления частоты (коэффициенты пересчета блоков 4 и 5 деления частоты одинаQ ковы) , то цена импульса в интегрирующем счетчике 8 не изменяется, и общее количество импульсов, зафиксированное в счетчике 8 к концу измерения, пропорционально массе
с автомобиля 12.
Таким образом, в случае движения автомобиля по грузоприемной платфор. ме со.скоростью превышающей допустимую, сокращение времени измерения в зависимости от скорости движения ав0 томобиля непосредственно в момент, предшествующий взвешиванию, позволяет повысить точность измерения за счет взвешивания автомобиля в течение времени, кратного наиболее
5 вероятному периоду .динамической помехи ,
Формула изобретения
р Устройство для взвешивания движущихся объектов, содержащее грузоприемную платформу, частотный дат-., чик веса, измеритель скорости, блоки деления частоты, генератор этаJ лонной частоты, схему совпадения, связанную с формирователем времени взвешивания и интегрирующим счетчиотличающееся
ком,
тем,
что, с целью повышения точности взвешивания, оно снабжено формирователем командных импульсов и путевым датчиком, один из выходов формирователя командных импульсов соединен со входом измерителя скорости а другой выход - подключен куправляющему входу формирователя времени взвешивания, а вход формирователя командных импульсов соединен с путевым датчиком, установленным в начале груэоприемной платформы.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 356478, кл. ,G 01 О 23/36, 1972/
2, Авторское свидетельство СССР I 512474, кл, QI 01 q 23/36, 1976 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для взвешивания движущихся объектов | 1975 |
|
SU521474A1 |
| Устройство для взвешивания движущихся объектов, например, автомобилей | 1975 |
|
SU515949A1 |
| УСТРОЙСТВО для ВЗВЕШИВАНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1972 |
|
SU356478A1 |
| Устройство для взвешивания транс-пОРТНыХ СРЕдСТВ | 1979 |
|
SU808865A1 |
| Устройство для взвешиваниядВижущиХСя Об'ЕКТОВ | 1978 |
|
SU794393A1 |
| Автоматическая микропроцессорная весоизмерительная система | 1987 |
|
SU1566226A1 |
| Устройство для взвешивания | 1976 |
|
SU657270A2 |
| Микропроцессорная весоизмерительная система | 1981 |
|
SU1078255A1 |
| Устройство для взвешивания движущихся объектов | 1987 |
|
SU1571408A1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1994 |
|
RU2105270C1 |
