so
со
00 00
я 1I Изобретение относится к устройст вам для перемещения рук роботов и м нипуляторов . Известен шарнир манипулятора, со держащий предыдущее,и последующее звенья, соединенные втулками со ско шенными то5)цами и карданным валом, соединяющим втулки которые снабжены индивидуальными приводами l. Недостатком известного, устройств является низкая грузоподъемность, обусловленная размещением привода непосредственно на подвижном звене манипулятора. Цель изобретения - повышение гру зоподъемности. Цель достигается тем, что шарнир манипулятора, содержащий предьщущее и последующее звенья, соединенные втулками со скошенными торцами и карданным валом, соединяющим втул-, ки, которые снабжены индивидуальными приводами, снабжен зубчатой передачей, а каждая втулка - полым стаканом, имеющим на торце сферический элемент, установленньи при помощи дополнительно введенной опор качения во втулке соосно с карданны валом и кинематически связанным с последующим звеном. Причем привод втулки последующего звена установле на предыдущем звене по его оси и со динен с втулкой последующего звеиа .посредством зубчатой передачи, при этом сферические элементы обоих стаканов образуют шаровой шарнир. На чертеже схематически изображе шарнир манипулятора. 72 Устройство состоит из предыдущего и последующего звеньев 1 и 2 соответственно, которые соединены втулками 3 и 4 со скошенными торцами с возможностью вращения вокруг осей звеньев 1 и 2. Каждая втулка снабжена полыми стаканами 5 и 6 со сферическими, элементами 7 и 8 соответственно, образующими шаровой шарнир. Стаканы 5 и 6 установлены во втулках посредством подшипников 9 и 10 соосно с карданным валом 11, который установлен на подшипниках 1 2 15. Для уменьшения трения между втулками размещены подшипники 16 и 17. Втулка 3 соединена с приводом 1В посредством зубчатой передачи 19, а втулка 4 соединена с приводом 20 карданным валом I1 посредством цилиндрической передачи 21. Устройство работает следующим образом. При совместной или раздельной работе приводов 18 и 20 втулки 3 и 4 вращаются относительно осей звеньев 1 и 2 соответственно, причем втулка 3 приводится во вращение от привода 18 через промежуточную передачу 19, а втулка 4 - от привода 20 карданным валом 11 через передачу 21. При этом звено 2 перемещается в объемно-сферической зоне относительно звена 1. Размещение приводов обеих втулок на предыдущем звене позволяет снизить массу звена и увеличить тем самым н фактическую грузоподъемность манипулятора.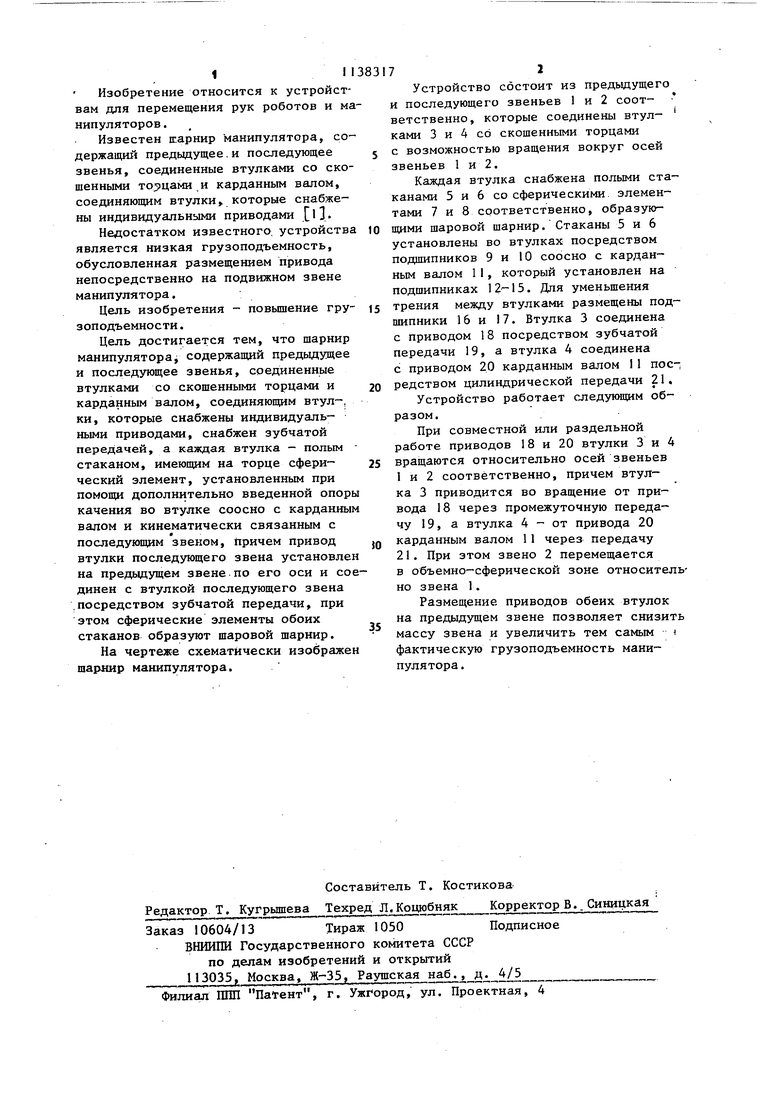
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАРНИР МАНИПУЛЯТОРА | 1999 |
|
RU2169069C2 |
| Шарнир манипулятора | 1985 |
|
SU1298076A1 |
| Захватная головка манипулятора | 1988 |
|
SU1572806A1 |
| Манипулятор для буровых машин | 1982 |
|
SU1086151A2 |
| Приводной шарнир манипулятора | 1989 |
|
SU1675079A1 |
| Мезанизм шарнира манипулятора | 1979 |
|
SU848356A2 |
| Шарнир манипулятора | 1987 |
|
SU1407803A1 |
| ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА | 1989 |
|
SU1832620A1 |
| МАШИНА ДЛЯ СФЕРОДВИЖНОЙ ШТАМПОВКИ | 1994 |
|
RU2071856C1 |
| СИСТЕМА ИМИТАЦИИ АКСЕЛЕРАЦИОННЫХ ВОЗДЕЙСТВИЙ ПОЛУНАТУРНОГО МОДЕЛИРУЮЩЕГО КОМПЛЕКСА ЭРГОНОМИЧЕСКОГО ПРОЕКТИРОВАНИЯ | 2024 |
|
RU2834755C1 |
ШАРНИР МАНИПУЛЯТОРА, содержащий предьщущее и последующее звенья, соединенные втулками со скошенными торцами и карданным валом. соединяющим втулки, которые снабжены индивидуальными приводами, отличающийся тем, что, с целью повышения грузоподъемности, он снабжен зубчатой передачей, а .каждая втулка - полым стаканом, имеющим на торце сферический элемент, установленным при помощи дополнительно введенной опоры качения во втулке соосно с карданным валом и кинематически связанным с последующим звеном, причем привод втулки доследующего звена установлен на предыдущем звене по его оси и соединен с втулкой последующего звена посредством зубчатой g передачи, при этом сферические элементы образуют шаровой шарнир. (Л
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство перемещения руки робота | 1980 |
|
SU905065A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
