(54) УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ РУКИ РОБОТА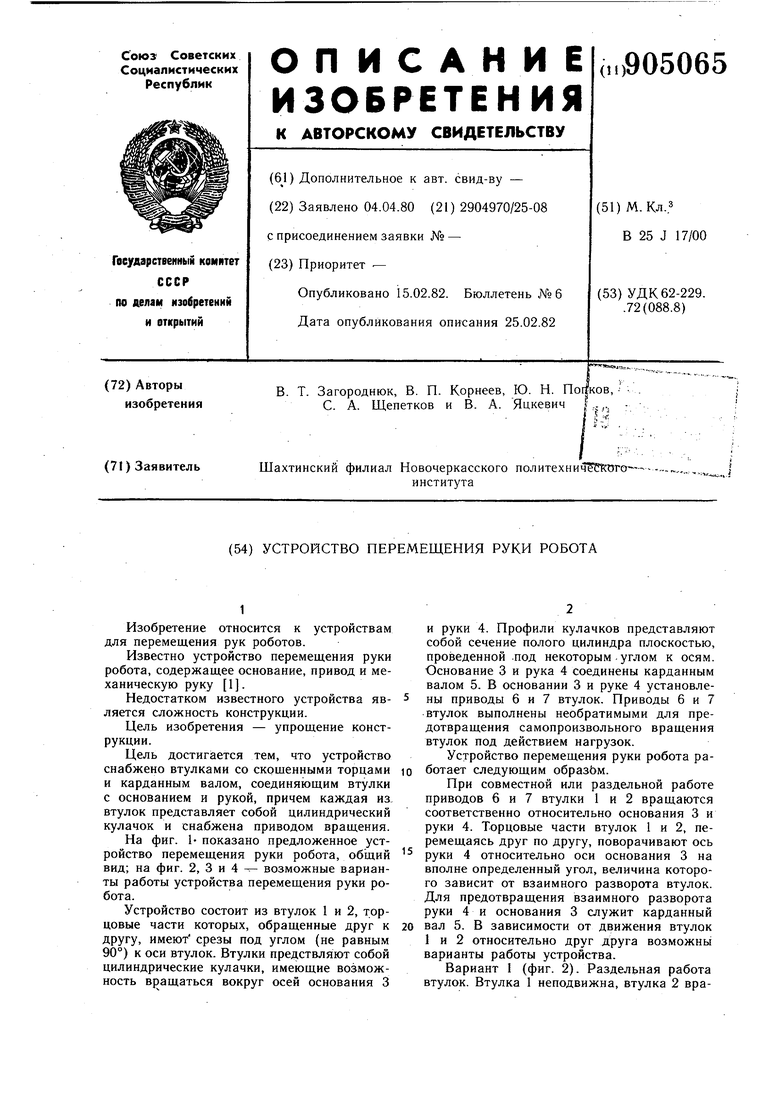
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство перемещения стреловидного исполнительного органа проходческого комбайна | 1987 |
|
SU1514926A1 |
| ВТУЛКА ВОЗДУШНОГО ВИНТА С АВТОМАТОМ ПЕРЕКОСА | 2018 |
|
RU2746024C2 |
| Шарнир манипулятора | 1985 |
|
SU1298076A1 |
| ПРОХОДЧЕСКИЙ РОБОТ И ТРАНСПОРТИРУЮЩИЙ МЕХАНИЗМ ПРОХОДЧЕСКОГО РОБОТА | 1988 |
|
SU1549153A1 |
| Шарнир манипулятора | 1983 |
|
SU1138317A1 |
| ПЕРЕДВИЖНОЕ УСТРОЙСТВО ДЛЯ ОБЛУЧЕНИЯ И РЕГИСТРАЦИИ РАДИАЦИИ | 2006 |
|
RU2403560C2 |
| Рука робота | 1987 |
|
SU1458202A1 |
| Манипулятор для буровых машин | 1980 |
|
SU912926A1 |
| Устройство для сборки | 1984 |
|
SU1177113A1 |
| ШАРНИР МАНИПУЛЯТОРА | 1999 |
|
RU2169069C2 |
1
Изобретение относится к устройствам для перемещения рук роботов.
Известно устройство перемещения руки робота, содержащее основание, привод и механическую руку 1.
Недостатком известного устройства является сложность конструкции.
Цель изобретения - упрощение конструкции.
Цель достигается тем, что устройство снабжено втулками со скошенными торцами и карданным валом, соединяющим втулки с основанием и рукой, причем каждая из. втулок представляет собой цилиндрический кулачок и снабжена приводом вращения.
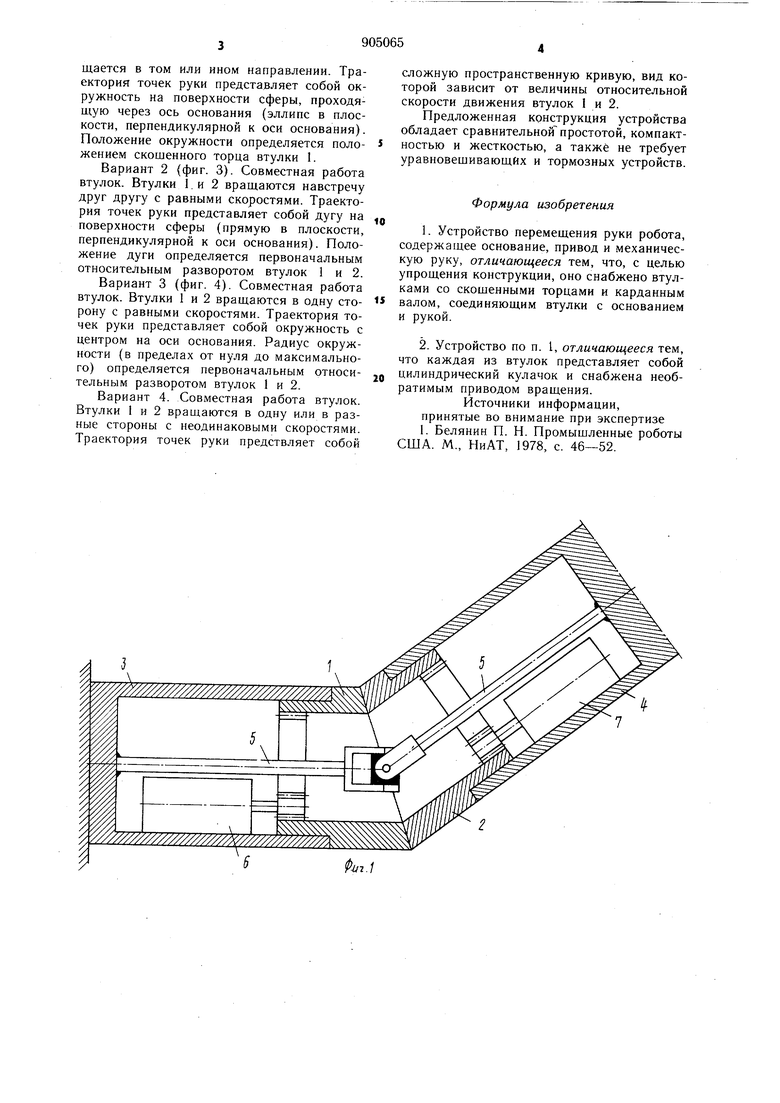
На фиг. 1- показано предложенное устройство перемещения руки робота, общий вид; на фиг. 2, 3 и 4 - возможные варианты работы устройства перемещения руки робота.
Устройство состоит из втулок 1 и 2, торцовые части которых, обращенные друг к другу, имеют срезы под углом (не равным 90°) к оси втулок. Втулки предствляют собой цилиндрические кулачки, имеющие возможность вращаться вокруг осей основания 3
и руки 4. Профили кулачков представляют собой сечение полого цилиндра плоскостью, проведенной под некоторым . углом к осям. Основание 3 и рука 4 соединены карданным валом 5. В основании 3 и руке 4 установлены приводы б и 7 втулок. Приводы 6 и 7 втулок выполнены необратимыми для предотвращения самопроизвольного вращения втулок под действием нагрузок.
Устройство перемещения руки робота ра10 ботает следующим образЬм.
При совместной или раздельной работе приводов 6 и 7 втулки 1 и 2 вращаются соответственно относительно основания 3 и руки 4. Торцовые части втулок 1 и 2, перемещаясь друг по другу, поворачивают ось
руки 4 относительно оси основания 3 на вполне определенный угол, величина которого зависит от взаимного разворота втулок. Для предотвращения взаимного разворота руки 4 и основания 3 служит карданный
20 вал 5. В зависимости от движения втулок 1 и 2 относительно друг друга возможны варианты работы устройства.
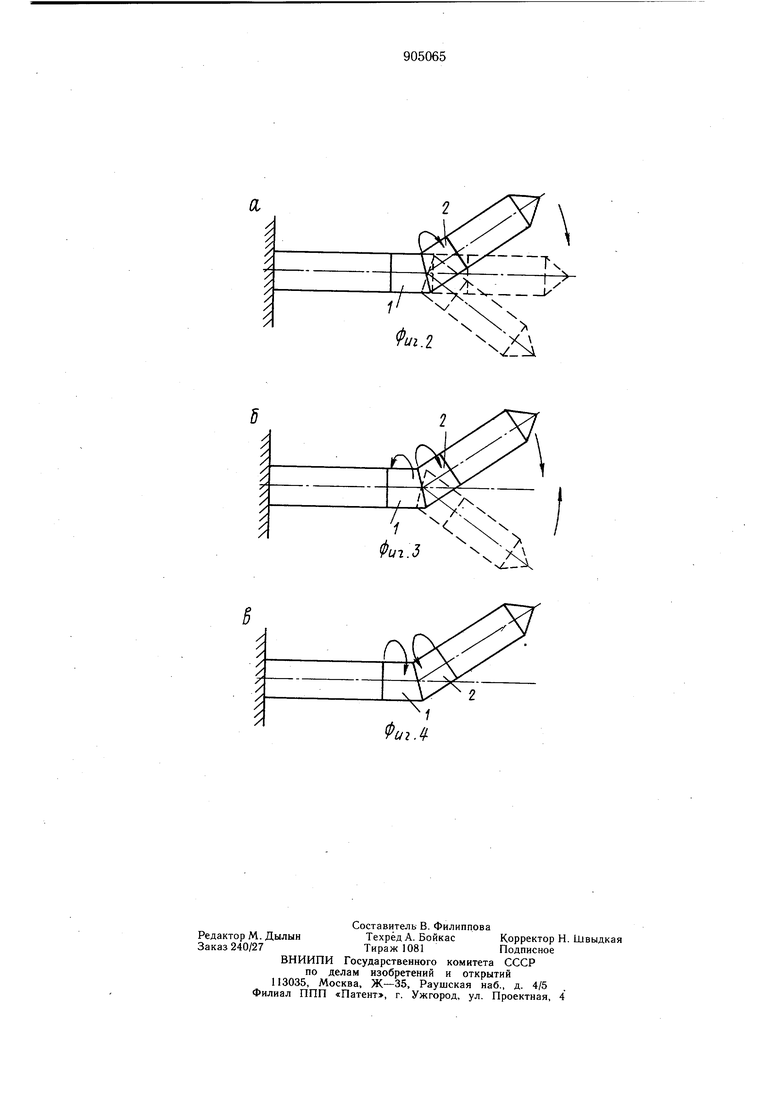
Вариант 1 (фиг. 2). Раздельная работа втулок. Втулка 1 неподвижна, втулка 2 вращается в том или ином направлении. Траектория точек руки представляет собой окружность на поверхности сферы, проходящую через ось основания (эллипс в плоскости, перпендикулярной к оси основания). Положение окружности определяется положением скошенного торца втулки 1.
Вариант 2 {фиг. 3). Совместная работа втулок. Втулки 1.И 2 вращаются навстречу друг другу с равными скоростями. Траектория точек руки представляет собой дугу на поверхности сферы (прямую в плоскости, перпендикулярной к оси основания). Положение дуги определяется первоначальным относительным разворотом втулок 1 и 2.
Вариант 3 (фиг. 4). Совместная работа втулок. Втулки 1 и 2 вращаются в одну сторону с равными скоростями. Траектория точек руки представляет собой окружность с центром на оси основания. Радиус окружности (в пределах от нуля до максимального) определяется первоначальным относительным разворотом втулок 1 и 2.
Вариант 4. Совместная работа втулок. Втулки 1 и 2 вращаются в одну или в разные стороны с неодинаковыми скоростями. Траектория точек руки предствляет собой
сложную пространственную кривую, вид которой зависит от величины относительной скорости движения втулок 1 и 2.
Предложенная конструкция устройства обладает сравнительнойпростотой, компактностью и жесткостью, а также не требует уравновешивающих и тормозных устройств.
Формула изобретения
Источники информации, принятые во внимание при экспертизе 1. Белянин П. Н. Промышленные роботы США. М., НиАТ, 1978, с. 46-52.
