/«
74
1U 13
// /У 77 / /
Ч
00
О
со
/«
/«
1407803
Изобретение относится к робототехнике, а именно к конструкции сочленений звеньев манипуляторов.
Целью изобретения является расширение, зоны обслуживания маниггулятора устранения заклинивания эле 1еит,ов шарнира при больших углах их поворота,
ОНа чертеже показан шарнир манипу- лятора, общий вид.
Шарнир манипулятора состоит из входного 1 и выходного 2 звеньев, оканчивающихся вилками 3 и 4 универсального шарнира, соединенных крестовиной - кольцом 5. Внутри звеньев 1 и 2 расположены кривошипы 6 и 7, имеющие возможность вращаться относительно оси звеньев 1 и 2 соответственно с помощью самотормозящихся приводов 8 и 9. Шейки кривошипов 6 и 7, наклонные по отношению к осям вращения кривошипов, входят в кинематическое соединение друг с другом с помощью стакана 10. Для уменьшения трения служат подшипники 11.
Шарнир снабжен кожухом, состоящим из двух стаканов 12 и 13 со скошенными торцами, соединенных с выходны0
5
0
5
При работе приводов 8 и 9 происходит вращйние кривошипов 6 и 7 относительно осей звеньев 1 и 2. Одновременно вращение от валов приводов 8 и 9 через механическую передачу с передаточным отношением, равным единице, передается стаканам 12 и 13 кожуха. При перемещении выходного звена по любой траектории плоскость разъема кожуха всегда остается перпендикулярной оси стакана 10 и заклинивание кожуха не происходит. Формула изобретения
Шарнир манипулятора, содержащий входное и выходное звенья, соединенные между собой универсальным шарниром и снабженные индивидуальными приводами, выходные валы которых вьтол- нены в виде кривошипов, кинематически связанных друг с другом, отличающийся тем, что, с целью расширения зоны обслуживания манипулятора за счет устранения заклинивания элементов шарнира при больших углах их поворота, он снабжен двумя дополнительными самотормозящимися приводами и кожухом, выполненным в
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
| МАНИПУЛЯТОР-ТРИПОД С ШЕСТЬЮ СТЕПЕНЯМИ ПОДВИЖНОСТИ | 2008 |
|
RU2403144C2 |
| Шарнир манипулятора | 1988 |
|
SU1502300A1 |
| Шарнир манипулятора | 1989 |
|
SU1678607A1 |
| МАНИПУЛЯТОР-ТРИПОД С ШЕСТЬЮ СТЕПЕНЯМИ ПОДВИЖНОСТИ | 2008 |
|
RU2403143C2 |
| СПОСОБ И УСТРОЙСТВО РЕГУЛИРОВАНИЯ УГЛА ВЫСТОЯ ЗУБЧАТО-РЫЧАЖНОГО МЕХАНИЗМА | 2005 |
|
RU2285168C1 |
| Исполнительный орган манипулятора | 1989 |
|
SU1722813A1 |
| Манипулятор | 1986 |
|
SU1364467A1 |
| ПАРАЛЛЕЛЬНЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2020 |
|
RU2753217C1 |
| ПРОСТРАНСТВЕННЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2022 |
|
RU2784764C1 |
Изобретение относится к робототехнике, а именно к конструкциям сочленений звеньев манипуляторов. Целью изобретения является расширение зоны обслуживания манипулятора за счет устранения заклинивания элементов шарнира при больших углах их поворота. При работе самотормозящихся приводов 8 и 9 вращаются кривошипы 6 и 7 относительно осей звеньев 1 и 2. Одновременно через механическую передачу с передаточным отношением, равным единице, вращение передается стаканам 12 и 13 кожуха. При перемещении выходного звена по любой траектории плоскость разъема кожуха всегда остается перпендикулярной оси стакана 10. 1 ил.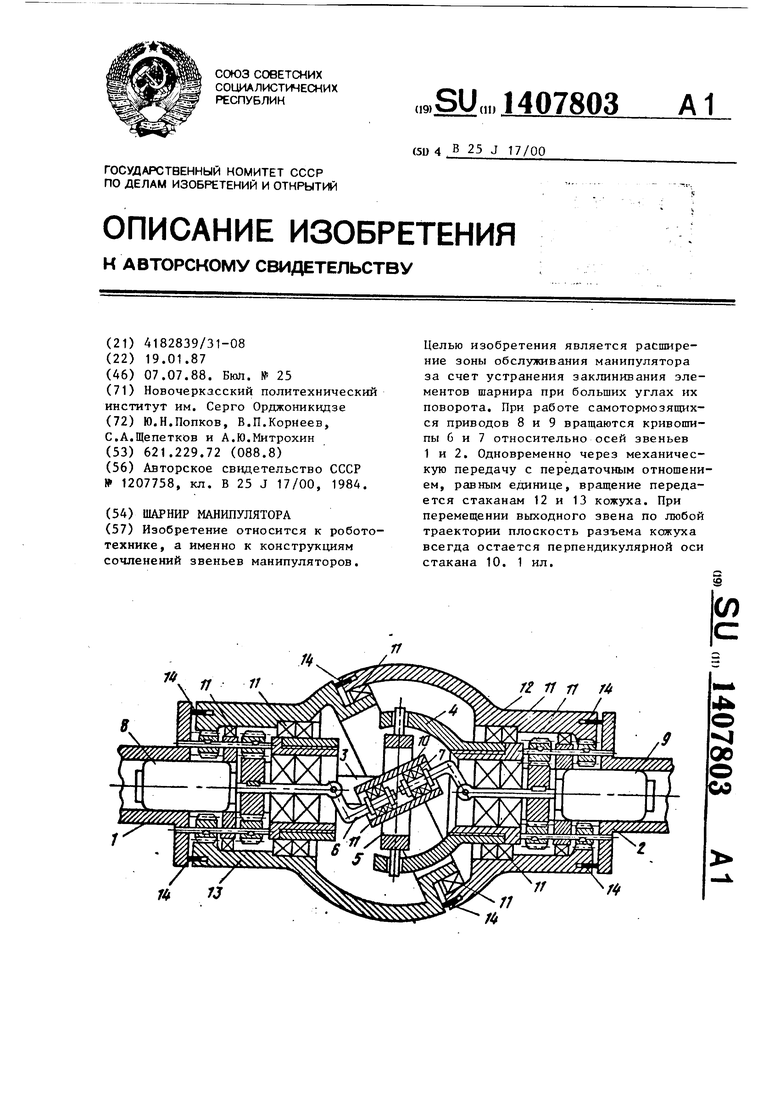
ми валами приводов через зубчатые пе- зо виде двух шарнирно связанных стакаредачи и снабженных торцевыми уплотнениями 14, Зубчатые передачи выполнены так, что их общее передаточное число равно единице, таким образом, угловая скорость вращения каждого . стакана равна угловой скорости соответствующего кривощипа.
Шарнир манипулятора работает следующим образом.
5
нов, имеющих.скошенные торцы, оснащенные дополнительными герметизирующими уплотнениями, установленных со- осно приводам и кинематически связанных каждый со своим самотормозящимся приводом, при этом плоскость разъема кожуха перпендикулярна оси универсального шарнира и проходит через его середину.
| Устройство относительного поворота звеньев манипулятора | 1984 |
|
SU1207758A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
