Изобретение относится к станкостроению, в частности к устройствам для перемещения рук роботов и манипуляторов.
Цель изобретения - повышение грузоподъемности и маневренности.
На чертеже изображен шарнир манипулятора, разрез.
Шарнир манипулятора содержит предыдущее звено 1 и последующее звено 2 руки 3, имеющее продольную ось К-К. Предыдущее и последующее звенья 1 и 2 соединены между собой втулками 4 и 5 со скошенными торцами. На втулке 4 с осью jV-N установлено последующее звено 2, а на втулке 5 с осью М-М установлено звено 1. Все три оси К-К, М-М и N-N пересекаются в одной точке О, являющейся центром шарнира карданного вала 6. Элементы шарнира имеют индивидуальные приводы, размещенные внутри предыдущего звена 1. Так, последующее звено 2 снабжено приводом 7 вращения относительно оси К-К Втулка 4 последующего звена снабжена приводом 8 вращения относительно оси N-/V через зубчатые колеса 9 и 10. Втулка 5 предыдущего звена 1 снабжена приводом 11 вращения через зубчатые колеса 12 и 13.
Втулка 4 установлена внутри втулки 5 и обе втулки 4 и 5 смонтированы в отверстии предыдущего звена 1, одна из поверхностей которого является опорой 14, причем центр массы О| втулки 4 вместе с установленными на ней элементами (например, зубчатым колесом 10) и центр массы О2 втулки 5 вместе с установленными на ней элементами (например, зубчатым колесом 13 и приводом 8) располагаются внутри предыдущего звена 1. Привод 8 вращения втулки 4 установлен на втулке 5, а карданный вал 6 жестко связан со звеном 2 и имеет независимый привод 7 вращения.
Устройство работает следующим образом.
При совместной или раздельной работе приводов 8 и 11 втулки 4 и 5 вращаются относительно осей N-Л и М-М соответственно. При этом звено 2 с рукой 3
перемещается в объемно-сферической зоне с телесным углом а. Неподвижность привода 7 при такой работе благодаря жесткой связи через карданный вал 6 предотвращает поворот руки 3 вокруг продольной оси К-К. При работе привода 7 независимо от
поворота втулок 4 и 5 обеспечивается возможность управляемого поворота руки 3 относительно оси К -К, что повышает маневренность. Кроме того, при любых эволюци- ях втулок силы GI и G2 тяжести втулок 4 и 5 и установленных на них элементов приложены в центре их масс Oi и О2, благодаря своему положению относительно опоры 14 являются уравновешивающими относительно точки приложения силы тяжести Сз полезного груза 15, что позволяет уве0 личить массу полезного груза.
Формула изобретения
Шарнир манипулятора, содержащий предыдущее (первое) и последующее (второе) звенья, установленные в каждом из них приводные втулки, имеющие скошенные торцы и контактирующие между собой этими торцами, приводы втулок и карданную передачу, отличающийся-гем, что, с целью по- выщения грузоподъемности и маневренности,
.. он снабжен индивидуальным приводом ротации последующего звена, расположенным на предыдущем звене, в приводной втулке предыдущего звена выполнена внутренняя проточка под углом к оси наружной поверхности этой втулки и в проточке установг лена приводная втулка последующего звена, привод которой расположен на наружной поверхности втулки предыдущего звена, при этом ведущий вал карданной передачи связан с приводом ротации, а ведомый вал жестко связан с последующим звеном, и
0 центры масс втулок и приводов лежат внутри предыдущего звена.
5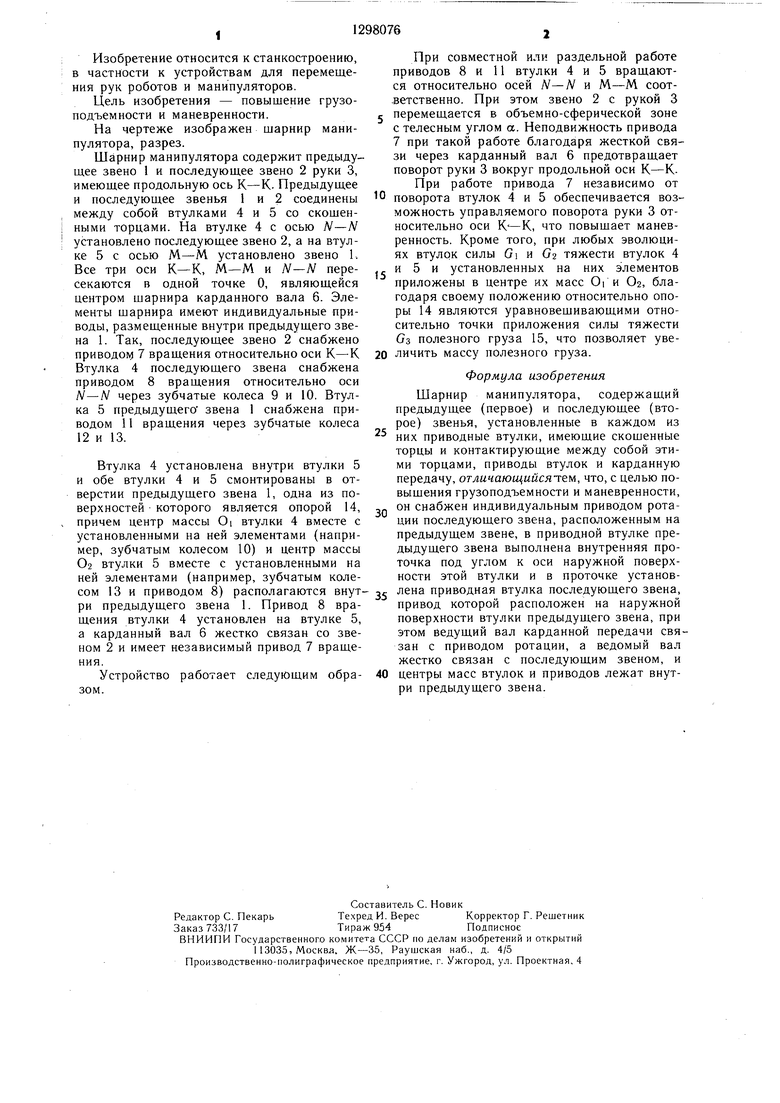
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор модульного типа | 1987 |
|
SU1435422A1 |
| Шарнир манипулятора | 1983 |
|
SU1138317A1 |
| ШАРНИР МАНИПУЛЯТОРА | 1999 |
|
RU2169069C2 |
| Мезанизм шарнира манипулятора | 1979 |
|
SU848356A2 |
| Устройство управления транспортным средством | 1984 |
|
SU1273285A1 |
| Шарнир манипулятора | 1990 |
|
SU1782722A1 |
| Шарнир манипулятора | 1983 |
|
SU1140946A1 |
| Манипулятор | 1980 |
|
SU891425A1 |
| Шарнир манипулятора | 1986 |
|
SU1430266A1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
Изобретение относится к робототехнике и промышленным манипуляторам. Цель изобретения - повышение грузоподъемности и маневренности руки манипулятора. Шарнир содержит предыдущее 1 и последую % т////////М щее 2 звенья, соединенные втулками 4 и 5 со скошенными торцами, карданный вал 6, размеш,енный внутри втулок и индивидуальные приводы 7, 8 и 11 враш,ения элементов шарнира, установленные внутри звена 1, причем втулки 4 и 5 расположены одна в другой и обе они - в отверстии звена 1 так, что центры масс втулок 4 и 5 вместе с размещенными на них элементами располагаются внутри звена 1, при этом привод 8 втулки 4 звена 2 установлен на втулке 5, а карданный вал 6 с индивидуальным приводом 7 его вращения жестко соединен с последующим звеном 2. 1 ил. 7 е-- / 3 ;5 (Л ГС ;о 00 о О5 /V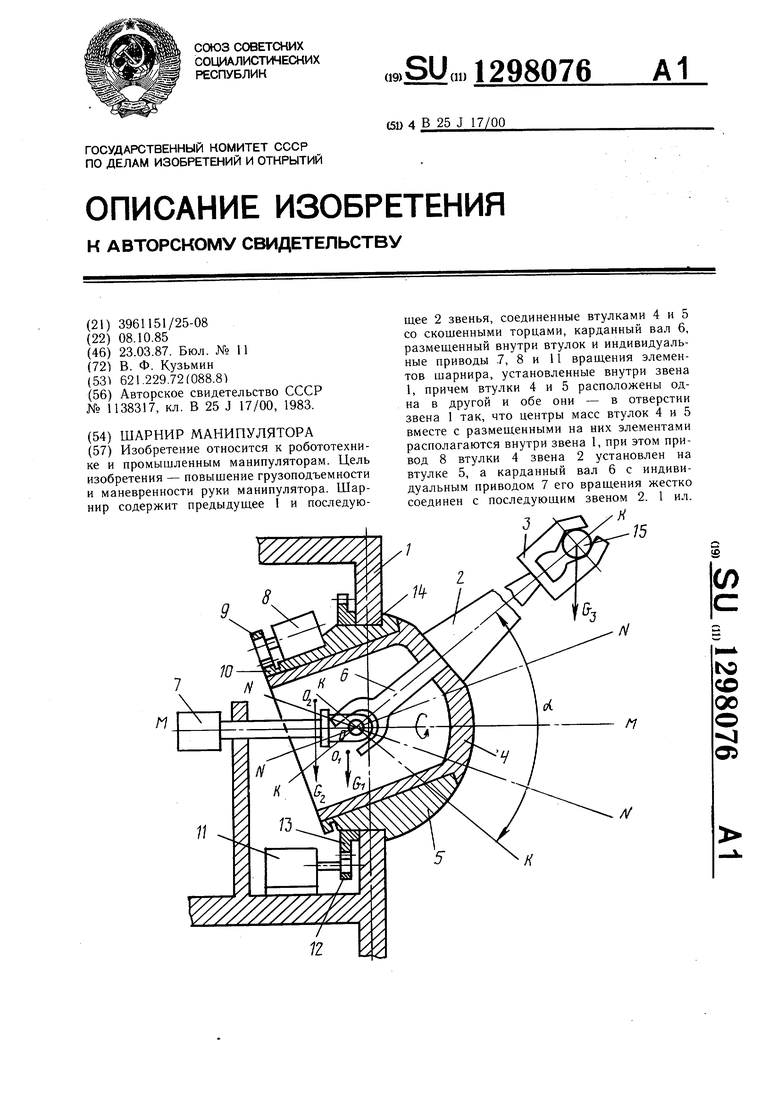
| Шарнир манипулятора | 1983 |
|
SU1138317A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
