Область техники, к которой относится изобретение
Изобретение относится к области полунатурного моделирования подвижных объектов для целей эргономического проектирования.
Система имитации акселерационных воздействий (СИАВ) полунатурного моделирующего комплекса эргономического проектирования (ПМК ЭП) предназначена для перемещения имитатора подвижного объекта, масса - габаритные характеристики которого позволяют перемещать в пространстве экспериментальный образец подвижного объекта в соответствии с характеристиками моделируемого движения объекта и его оператора и моделировать акселерационные воздействия, которым подвергается оператор подвижного объекта.
Уровень техники
Известен многостепенной динамический стенд КТС ТУ-204, предназначенный для имитации акселерационных нагрузок. Стенд имеет источник гидравлического питания, шесть взаимно связанных силовых гидроцилиндров (следящих гидроприводов), закрепленных на основании, каждая пара которых образует треугольник с вершинами на рабочей платформе. Каждый из трех пар гидроцилиндров на краях имеет шаровые опоры, которые связаны с рабочей платформой и основанием. Каждый из следящих гидроприводов состоит из последовательно соединенных чувствительного элемента, сумматора, усилителя мощности, гидроусилителя и силового цилиндра.
Стенд КТС ТУ-204 является дорогим и сложным в эксплуатации.
Известен имитатор морской качки по патенту RU 146498, содержащий основание, электродвигатели, кронштейны. Он содержит верхнюю платформу, среднюю платформу, нижнюю платформу, персональный компьютер, кабельные линии связи, защитный кожух, раму для фиксации на транспортном средстве, имеющую электроразъемы. Верхняя платформа содержит дополнительное поворотное основание, закрепленное двумя шариковыми подшипниками, включающее шаговый электродвигатель, муфту, винт шариковинтовой передачи, упор винта шариковинтовой передачи, рельсовый направляющий элемент, магнитную ленту линейного энкодера, жестко закрепленную на кронштейне линейного энкодера. Верхняя платформа соединена со средней платформой посредством двух кронштейнов, соединенных со средней платформой упорными роликовыми подшипниками двухстороннего действия. Верхняя часть средней платформы содержит стопор, контроллер, дополнительное поворотное основание, закрепленное двумя шариковыми подшипниками, включающее гайку шариковинтовой передачи, каретку рельсового направляющего элемента, линейный энкодер. Нижняя часть средней платформы содержит стопор, два драйвера шаговых электродвигателей, дополнительное поворотное основание, закрепленное двумя шариковыми подшипниками, включающее гайку шариковинтовой передачи, каретку рельсового направляющего элемента, линейный энкодер. Нижняя платформа содержит дополнительное поворотное основание, закрепленное двумя шариковыми подшипниками, включающее шаговый электродвигатель, муфту, винт шариковинтовой передачи, упор винта шариковинтовой передачи, рельсовый направляющий элемент, магнитную ленту линейного энкодера, жестко закрепленную на кронштейне линейного энкодера.
Недостатком имитатора является сложность технической реализации, недостаточная жесткость конструкции и высокая погрешность определения углов отклонения платформы. Отсутствует возможность моделирования сложных параметров качки, обусловленная достаточно медленной отработкой управляющих команд с помощью винтовой системы. Отсутствует возможность моделирования отклонения курса судна при качке.
Прототипом заявляемого изобретения является система имитации акселерационных воздействий на базе кривошипно-шатунного механизма, известного как платформа Гью-Стюарта. (Пащенко В.Н. Построение рабочей зоны шестистепенного манипулятора параллельной структуры на базе кривошипно-шатунного механизма // Интернет журнал «НАУКОВЕДЕНИЕ» Том 8, №3 (2016) http://naukovedenie.ru/PDF/142TVN316.pdf (доступ свободный). Загл. с экрана. Яз. рус., англ. DOI: 10.15862/142TVN316; Лапиков А.Л., Пащенко В.Н., Алгоритм решения прямой задачи кинематики многосекционного манипулятора параллельной структуры. Наука и Образование. МГТУ им. Н.Э. Баумана. Электрон, журн. 2014. №12. С. 128-136. DOI: 10.7463/0815.9328000). Шестистепенный механизм параллельной структуры состоит из нижнего неподвижного звена (основания) и верхней подвижной платформы (выходное звено), соединенные шестью кинематическими цепями, имеющими кривошипно-шатунную структуру. Каждая из шести кинематических цепей механизма содержит одну приводную вращательную кинематическую пару, связанную с основанием, одну промежуточную сферическую кинематическую пару, и одну сферическую кинематическую пару, сопряженную с выходным звеном. Как на нижней платформе, так и на выходном звене шарниры располагаются попарно и на одинаковом расстоянии от соответствующих центров.
К достоинствам таких механизмов относятся повышенные показатели по грузоподъемности, массово-габаритные характеристики, точность, надежность, жесткость. Однако, такие механизмы имеют ограниченное рабочее пространство. Минимальная высота верхней платформы гексапода в рассматриваемых конструкциях составляет около 0,7÷0,8 м. Высота внутреннего пространства экспериментального образца подвижного объекта для целей эргономического проектирования составляет не менее 2 м, что обусловлено антропометрическими характеристиками оператора. Это требует для применения изделия по назначению размещение его в помещении с высотой более 4 м.
Раскрытие сущности изобретения
Предложена система имитации акселерационных воздействий полунатурного моделирующего комплекса эргономического проектирования, которая включает основание, 6-ти степенной манипулятор параллельной структуры с разнесенной октаэдральной компоновкой приводов, подвижную платформу, соединенную с основанием посредством шести приводов. Приводы имеют шарико-винтовую передачу, нижняя часть каждого из приводов крепится к основанию и состоит из редуктора и нижнего карданного соединения, при этом шток привода присоединен к подвесу подвижной платформы через верхнее карданное соединение, подвес расположен ниже верхней точки крепления приводов.
Конструкция системы имитации акселерационных воздействий полунатурного моделирующего комплекса эргономического проектирования является разборной.
Техническим результатом заявляемого изобретения является создание испытательного устройства, которое позволяет проводить испытания для целей эргономического проектирования при небольшой мощности в условиях ограниченного пространства, которое является компактным и дешевым.
Краткое описание чертежей
Сущность изобретения поясняется чертежами:
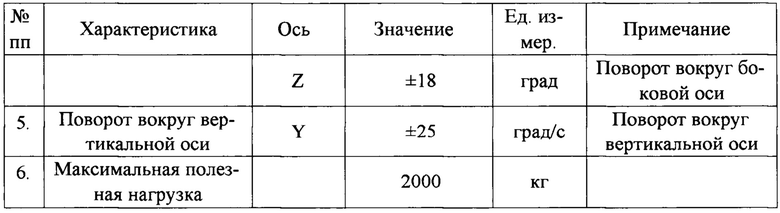
фиг. 1 представлена СИАВ ПМК ЭП, общий вид,
фиг. 2 - конструкция основания СИАВ ПМК ЭП,
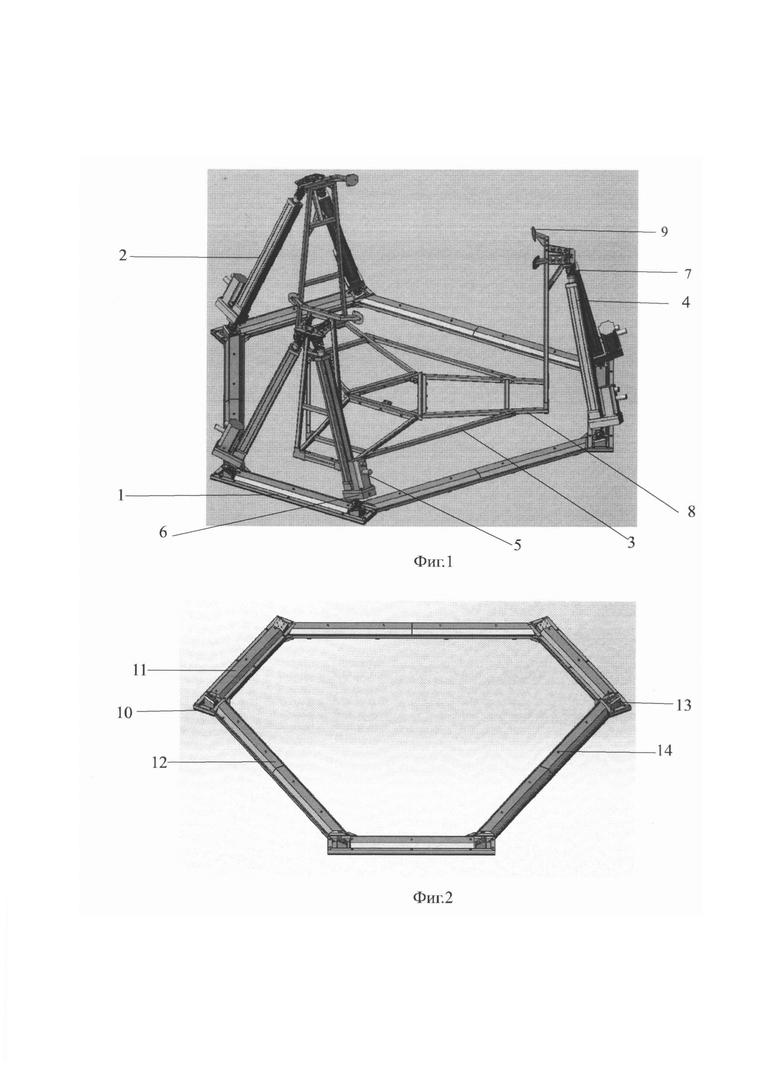
фиг. 3 - конструкция подвеса подвижной платформы СИАВ ПМК ЭП,
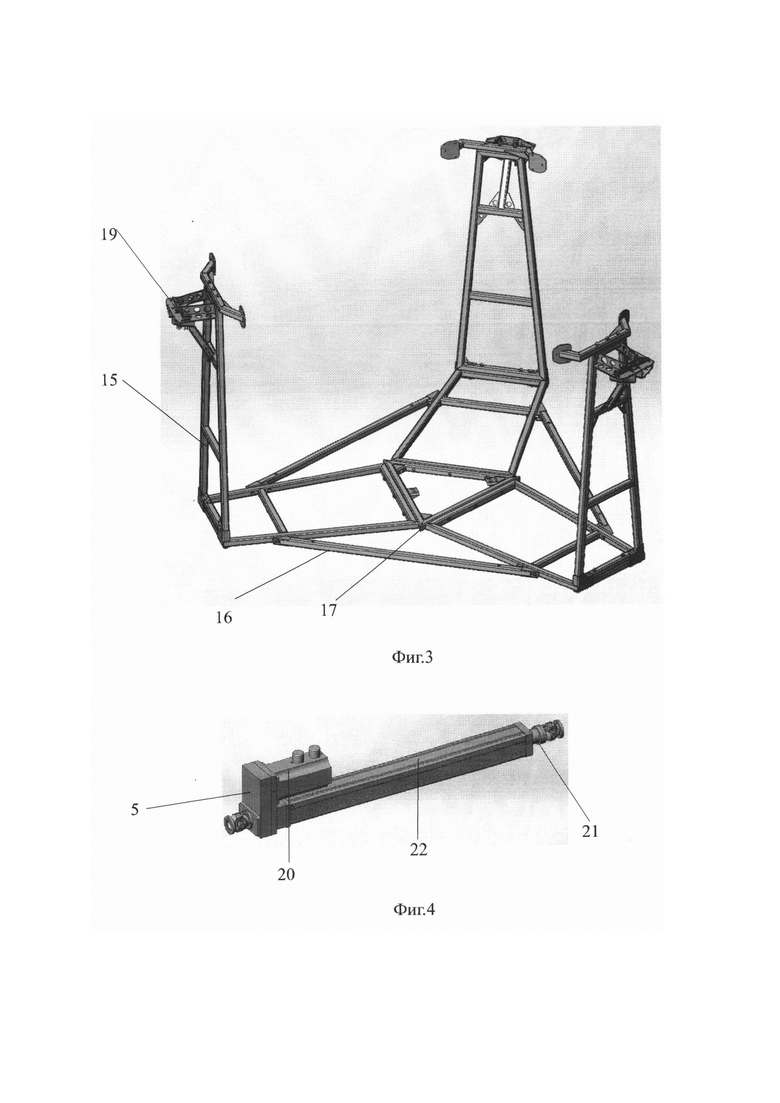
фиг. 4 - конструкция штока привода СИАВ ПМК ЭП,
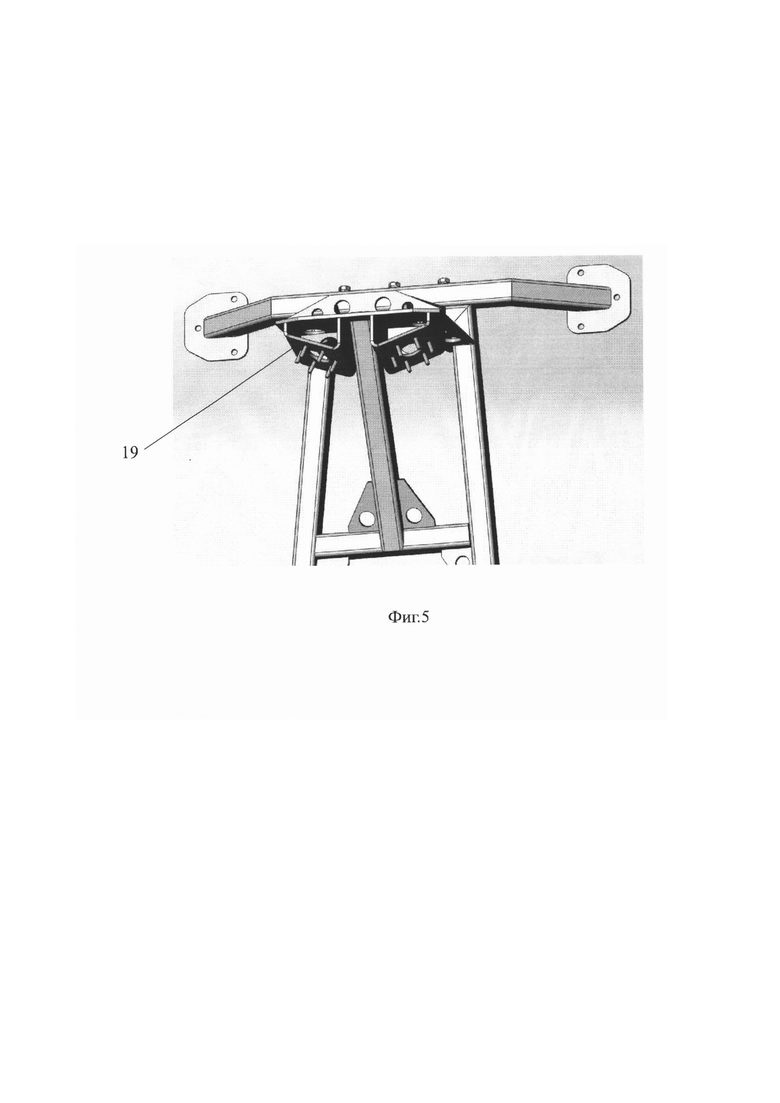
фиг. 5 - конструкция верхней части подвеса подвижной платформы СИАВ ПМК ЭП.
Осуществление изобретения
СИАВ ПМК ЭП включает основание (1), 6-ти степенной манипулятор параллельной структуры с разнесенной октаэдральной компоновкой приводов (2), подвижную платформу (3), соединенную с основанием посредством шести приводов (4). Нижняя часть каждого из приводов (4) крепится к основанию (1) и состоит из редуктора (5), нижнего (6) и верхнего (7) карданных соединений, при этом к верхнему карданному соединению (7) присоединен подвес (8) подвижной платформы (3), которая расположена ниже верхней точки крепления приводов (9).
Основание (1) представляет собой разборную металлоконструкцию, состоящую из опор основания (10), крышек кабель-каналов (11) и перемычек (12). На опорах основания (10) расположены фланцы (13) для крепления приводов (4). По периметру основания имеются отверстия (14) для крепления основания (1) к полу помещения при помощи анкеров.
Угол наклона фланцев (13) рассчитан с учетом диапазона работы СИАВ.
Наличие фланцев обусловлено требованием обеспечения проноса элементов конструкции в дверной проем и обеспечивает собираемость изделия на месте монтажа.
Металлоконструкция подвеса подвижной платформы (3) состоит из стоек подвеса (15), рам (16), перемычек (17) и центральной рамы (18).
На стойках подвеса (15) располагаются фланцы (19), на которые устанавливается верхний карданный шарнир привода (7).
Крепление экспериментального образца подвижного объекта к подвесу осуществляется через отверстия в перемычках подвижной платформы и при помощи опорных пластин экспериментального образца подвижного объекта.
Подвижная платформа (3) соединена с основанием посредством шести приводов (4), каждый из которых имеет серводвигатель (20), приводящий в движение шток (21), движение на который передается через шкивы и зубчатый ремень, расположенные в редукторе (5).
Преобразование вращения серводвигателя (20) в поступательное движение штока (21) в приводах (4) осуществляется через шарико-винтовую передачу.
Шарико-винтовая пара состоит из гайки, тел качения и винта. Шток крепится в гайке внутри корпуса. За счет отсутствия фиксации от проворота штока в корпусе привод при установке в СИАВ ПМК ЭП обеспечивает 6 степеней свободы.
Разборная конструкция СИАВ ПМК ЭП позволяет осуществить пронос составных частей СИАВ ПМК ЭП в дверной проем размером 1800 мм × 2100 мм (Ш×В).
СИАВ ПМК ЭП подключается к промышленной электрической сети 380 В 50 Гц мощностью не менее 15 кВА.
Внешние подключения к СИАВ ПМК ЭП осуществляются через блок управления платформы. Параметры движения моделируемого объекта, управляемого от выбранного рабочего места оператора, передаются по локальной вычислительной сети на основании решения программно-математической задачи модели воздействий, которая формирует управляющие команды для стоек подвижной платформы.
В таблице представлены основные технические характеристики СИАВ ПМК ЭП.
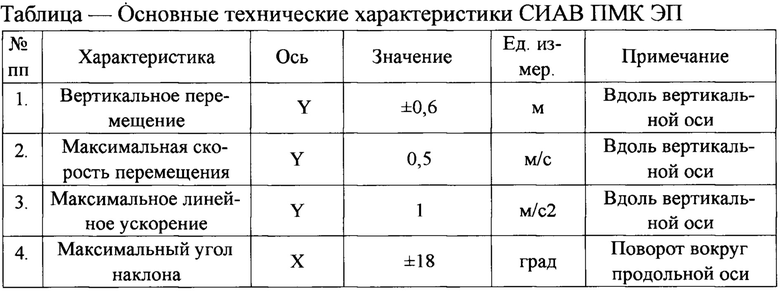
Таким образом, заявляемое решение испытательного устройства позволяет обеспечить приведенные в таблице характеристики перемещения ЭО ПО, что позволяет проводить испытания для целей эргономического проектирования при небольшой мощности в условиях ограниченного пространства, которое является компактным и дешевым.
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд полунатурного моделирования движения летательного аппарата с цифровой системой управления | 2022 |
|
RU2786280C1 |
| Способ полунатурных испытаний для обучения и настройки адаптивных систем автоматического управления беспилотных воздушных судов | 2023 |
|
RU2795073C1 |
| ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ МЕХАНИКОВ-ВОДИТЕЛЕЙ ПОДВИЖНЫХ КОМПЛЕКСОВ ВООРУЖЕНИЯ | 2019 |
|
RU2711047C1 |
| ДИНАМИЧЕСКИЙ ИСПЫТАТЕЛЬНЫЙ СТЕНД | 2014 |
|
RU2554198C1 |
| ДИНАМИЧЕСКИЙ МНОГОСТЕПЕННОЙ СТЕНД | 2006 |
|
RU2321073C1 |
| ДИНАМИЧЕСКИЙ СТЕНД | 2005 |
|
RU2285959C2 |
| Экзоскелет для дистанционного управления в копирующем режиме антропоморфным роботом | 2021 |
|
RU2832192C2 |
| Способ полунатурных роботизированных исследований и испытаний систем управления беспилотных воздушных судов вертикального взлета и посадки (БВС ВВП) | 2021 |
|
RU2771692C1 |
| МОБИЛЬНЫЙ РОБОТ | 2012 |
|
RU2487007C1 |
| Пилотажный стенд с подвижной кабиной | 1991 |
|
SU1798811A1 |
Изобретение относится к области полунатурного моделирования подвижных объектов для целей эргономического проектирования. Система имитации акселерационных воздействий, предназначенная для использования в составе полунатурного моделирующего комплекса эргономического проектирования, включает основание, 6-степенной манипулятор параллельной структуры с разнесенной октаэдральной компоновкой приводов, подвижную платформу, соединенную с основанием посредством шести приводов. Приводы имеют шарико-винтовую структуру. Нижняя часть каждого из приводов крепится к основанию и состоит из редуктора, нижнего и верхнего карданных соединений. К верхнему карданному соединению присоединен подвес подвижной платформы, которая расположена ниже верхней точки крепления приводов. Достигается возможность проведения испытаний для целей эргономического проектирования при небольшой мощности в условиях ограниченного пространства. 5 ил.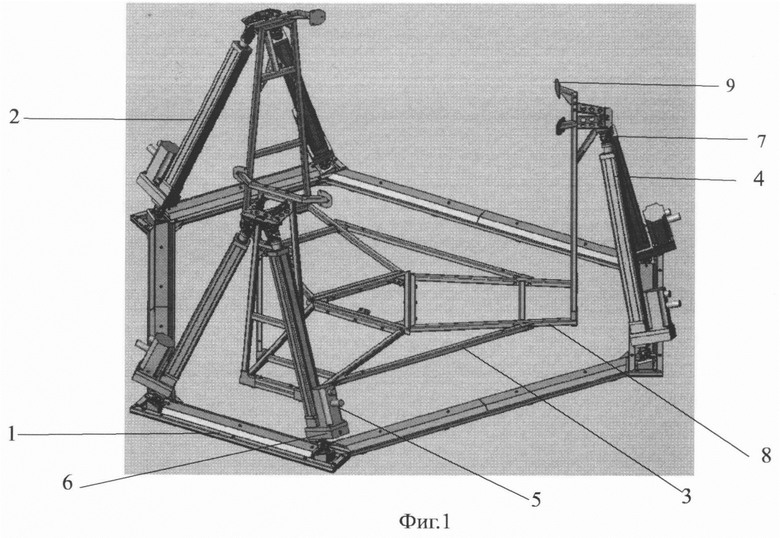
Система имитации акселерационных воздействий полунатурного моделирующего комплекса эргономического проектирования, включающая основание, 6-степенной манипулятор параллельной структуры с разнесенной октаэдральной компоновкой приводов, подвижную платформу, соединенную с основанием посредством шести приводов, отличающаяся тем, что приводы имеют шарико-винтовую структуру, нижняя часть каждого из приводов крепится к основанию и состоит из редуктора, нижнего и верхнего карданных соединений, при этом к верхнему карданному соединению присоединен подвес подвижной платформы, которая расположена ниже верхней точки крепления приводов.
| ИМИТАТОР АКСЕЛЕРАЦИОННЫХ ВОЗДЕЙСТВИЙ ДЛЯ АВИАЦИОННОГО ТРЕНАЖЕРА | 1988 |
|
RU1535223C |
| УСТРОЙСТВО ПЕРЕДАЧИ НАБРАНПОГО ЧИСЛА ОТ КЛАВИАТУРЫ НА ДЕСЯТИЧНЫЙ СЧЕТЧИК-РЕГИСТР | 0 |
|
SU167789A1 |
| US 2007059668 A1, 15.03.2007 | |||
| Тренажерное устройство имитации полета с виртуальной визуализацией | 2021 |
|
RU2784513C1 |
| УСТРОЙСТВО ДЛЯ ПОВЫШЕНИЯ ЧУВСТВИТЕЛЬНОСТИ ГАЛЬВАНОМЕТРА ОСЦИЛЛОГРАФА ИЛИ ИНЫХ ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ | 1934 |
|
SU43938A1 |

