1 j oCpc i ; И if . H. ч li-i i;. к 1Л чю-гг1;i f Mv.-iy И ;M ipo;--i;oM МЛ1П1 О1;1 pi li-iiiiii: , }j ;лг тпог : : i ,;,г,Г ;п;-. я:: - чпмк,; i: чо rx:i,S;(.; МЯ ;-,)Ч .(Н.А СЬ,:.-jVi:-:iiOJ ;Л ;чп;г., и .T быть b iaно j; c iciv Mnx авто:дт С кого rvvry-j ipnt.;зи1 вы::гfMfi-ij П . ( рибочего : М:;-;. ИЛ131:СГ(;Н даТЧРК iMM-JTJKSJlbHOiO ПОложа ч ;1 рабс:чсг( М-ган-т, лчлючаюияй потен1диом(-JP; i ;: r.i; irosxiporo эаKpenjteii счираоппгй /: : кппирчьп u,yu i 1, ;;одч -i i i o;-) ,, яв.чяется то что eve Слълч прм. ъ системах с указателеь: положения рабочегО орггпа о1Ч1оситель 1О .пизернсчч ;:уча. Начбо. оппзк -г по тех}Ч ческой cyuuOCTH к: предлагаемому является , датчик нертик;и ; чо:гп положения рабо чего oprai-.a г- аии-шы, вкл чаюний iiuipKHpiio свчяаьиый с рабочим органом маятник н - ехапизм с рычагами 1 рео6ра:- оваиия уг.чов,;х пеоемсчдеиий iЯ гrпнкa отиогит(;-ьно к чшттчон M-viiHH па велт1чи;гу, pannvio О пибке да н| } (.1ОСКОС7Ч- мчятуи ка 2 } Ь-е,,ос, таок нзне:с ыого у с тр-. и с т ч а с.пожиос::1ч, его изготсвле-н , Цель изобретения - uopijiTiiejiHe точное.) и за счет уменьшения .чофтов. Поставлен {ая цель ,г,осчч- гяется тем ч То датчик верт гткалг и го лоложения рабочего органа зем еро чо/г г.;аиинЫу Б;а юча10 диУ; uiapiiipi;.; аччьй с рабоч1-гм органом маятчик и ь ех;ли;ам с рычагами rrpeo6pa. угдо)гл перемещений маятника гггпоси i-ельно раб чего органа в неремом-МИ: указателя положения рабоче о чгапа относитч :л;ьмо ко11Ир1 ой .пнпии Tia iir.iiiroMy prtiiisyio опибке датчьччЯ из-за - клонов рйбоче;-о огччп-а н плоскос ти ка-ча 1 ;л маят-ии-;,. снабжен ;аруи)1тио сое/ икечп ;ч 1 о ;оь1ыслом ii ; ;1туиоМ5 ( (ДЧ;, KOj;(M;,CjTa иариипчг; i-чзан г --:а;( и х;естко - с рпчагоьг мгланизма иреобразопания yrjioBbui nei tiMetiiPHbn маятчи1;а. а свободный конец шарн;;ри{ с ризан с pa6o4iiM ., нри зГом iiiji-i отсутстпг-ги HaKJiofoii послед;и;го. :д-гум уг-глно 5:чен пернеидикуJi i4i Icjiu iiiicny, угол между KopOMbieдсч п : еолил 1)ической :;рямой прсхо;:it.;jj-.i четвз ciapUHpbi С15язи маятника и /;:а Гуна с рабочи.1 , углу ;-е.11ДУ горизонтальной ггюскос ггю и ге: -н: гр;;ческ(;; )й, . через iijaraaui сзял11 -к;:-г1 чика ,; pa6oL iiM ирганом U точкой ча раПочсч-; opiaru верTHK/UTbiioe ноложеч;те котог сч от ределнет его j-jsyCnHy KoiiajniH. На .-ке изо(:ражен дат-ч:-), устано:-чени :Л1 на 5абочеь органе землеройно;: магллны, иид сбоку, 1 иодве::1ен. к 3ebL4epoAHOMy paGo4f-f.iy органу 2 на ;1арнире 3 . С NsaHTHHROM 1 посредством шарн1 ра 4 связаь:о коромьк:ло 5, ко-горое чер1ез 6 сяязлно с 1;;атуном 7, 1;1атун 7 связан с пабочнм opruiio i 2 шарпиром 8, Kopo -- LJCj4o 5 жестко СЕяза1Ю с рьпатч- - 9; KOTOpL;;- ч сот окуиности с рь чагам11 0, Ч и рг 1чагами 12. 13, 14 парч1члело1рамьн1огг; чеханизма слу7AVIT гля нередачи движения коромысла 5 указателю 15. Ша тниры 4, 6 и 8, коpoMbicjio 5, шатун 7, рычаг 1 10, 11 и параллелограммный N;exaHHi3M, с остоящий из рыч го;3 12-14. в совокупности (бразуКТ устройство 16 нреобразования угловых He 5eMe:ue;iM i NiaHTiniKa 1 относьгтелыю 1;п6очето О1)гана 2 D неремещен1 е указателя 15 на величину ошибки из-за нрауспия рабочего органа 2 в п :1одо - ь,чой вертирчальной плоскости вокруг точки О ., вертикальное поло;кенис которой определяет глубину рабочего орта)1а. В с. ноложечпн 1 о-тчюсительно pa6otiero органа 2. которое имеет место нри отсутствии накло1;ов последнего в продольной вертикаль:- ой н.поскост). шарнир 3 занимает положение, которому соответствует угол f, между 1ЧМ етрическ;)й чрямой, прохсчдящей черсчэ точку О и п-арнир 3, и го)ИЗ::чп-алTHipii njiocKfjCTbiO, Пор омысла зыора1-ч,1 так, что в среднем но,ножении мая1Ч(ика угол cv мелдлу геометрической чрямой, нроходяще через 1иар)и)Ь 3, 8,, коромыслом 5 равс:и углу -f , а угол ft между коромыслом 5 и i;ia-ryiiON 7 J:I, 90 , При наклонг; рабочего органа в продюль1ЮЙ верг-икальноГ плоскости на угол Ч на талччэй же-, угол изменяется угол между геометрическоГ) прямой JITJOходяще через то-чку О и шарнир 3, и горизонтальной нлоскостькл, а -акже угол мелщу прямой, нрохе чяце) через шарниры 3,8, и маятником . 3 На чертеже положение шарнира 3 определяется по положению его центра в точке С радиусом-вектором R относительно неподвижной системы от счета КОУ с началом в точке О и с осью ОХ , совмещенной с горизонталь ной плоскостью. Положение шарнира 8 определяется по положению его центра в точке /4 радиусом-вектором г от носительно подвижной системы коорди нат , связанной с маятником 1. Начало координат Х СУ совмещено с точкой С , а положение оси СХ выбрано так, что угол между осью СХ и прямой (вектор г) равен углу м ду осью и прямой ОС(вектор R). Поскольку начало системы помещено в точку С и она связана с маятни ком 1, то равенство указанных углов соблюдается независимо от угла f наклона,рабочего органа 2 в продоль ной вертикальной плоскости. Положение шарнира 6 определяется по полож нию его центра в точке 6. При наклоне рабочего органа 2 в продольной вертикальной плоскости на угол -( радиус-вектор R поворачивается в системе координат ХОУ на тот же угол относительно начального угла fjj, при этом изменение ординаты У точки С выражается формулой ЛУс Rsin(4,5+4) - RsinV.. Наклон рабочего органа на угол - сопровождается поворотом ради савектора г в системе на тот же угол, при этом изменение ординаты Уд точки А всистеме определяется анапопгчной (1) формулой (Ч +С) - rsin4 , 0 Из формулы (1) и (2) следует 5 .аУд г Поскольку в среднем положении маятника угол jb 90, то изменение ординаты Уд точки В достаточно точно соответствует изменению ординаты , точки А. Ордината У-,точки D фотоприемника характеризует его вертикальное положение в системе ХОУ. Изменение ординаты У-Q точки В складывается из вертикального перемещения &У точки С и перемещения фотоприемника под действием устройства 16 преобразования угловых перемещений маятника. В пределах небольших изменений угла с достаточной точностью изменение ординаты У. можно выразить формулой uYj,iY,-AY,, -ГГЧ Условие компенсац1ти ошибки датчика из-за наклонов рабочего оргэня выражается условием ЛУф О Из формулы (А) с учетом (3) и (5) следует выражение для выбора длин рычагов 9, 11 и 12: г , h ft о а t t. Применение предпагаемого 1 3обретения упрощает технолопж) изготовления устройства и точность его работы за счет уменьшения люфтов.

| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик вертикального положения рабочего органа землеройной машины | 1985 |
|
SU1625961A1 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ВЫЛЕТА СТРУИ К ГОРИЗОНТУ | 2002 |
|
RU2237398C2 |
| Датчик высотного положения рабочего органа землеройной машины (его варианты) | 1984 |
|
SU1208151A1 |
| Прямолинейно-направляющий механизм | 1990 |
|
SU1803654A1 |
| ДВУХВАЛЬНЫЙ КРИВОШИПНО-ШАТУННЫЙ МЕХАНИЗМ | 2007 |
|
RU2349813C1 |
| МАЛОГАБАРИТНЫЙ ДЛИННОХОДОВОЙ СТАНОК-КАЧАЛКА | 2011 |
|
RU2476722C1 |
| Гидромеханическая система стабилизации положения рабочего органа планировочной машины | 1983 |
|
SU1164375A1 |
| Пресс-автомат для обработки длинномерного материала | 1987 |
|
SU1442298A1 |
| Рычажно-зубчатый механизм | 1984 |
|
SU1188415A1 |
| НАГЛЯДНОЕ ПОСОБИЕ ПО МАТЕМАТИКЕ | 2000 |
|
RU2166212C1 |
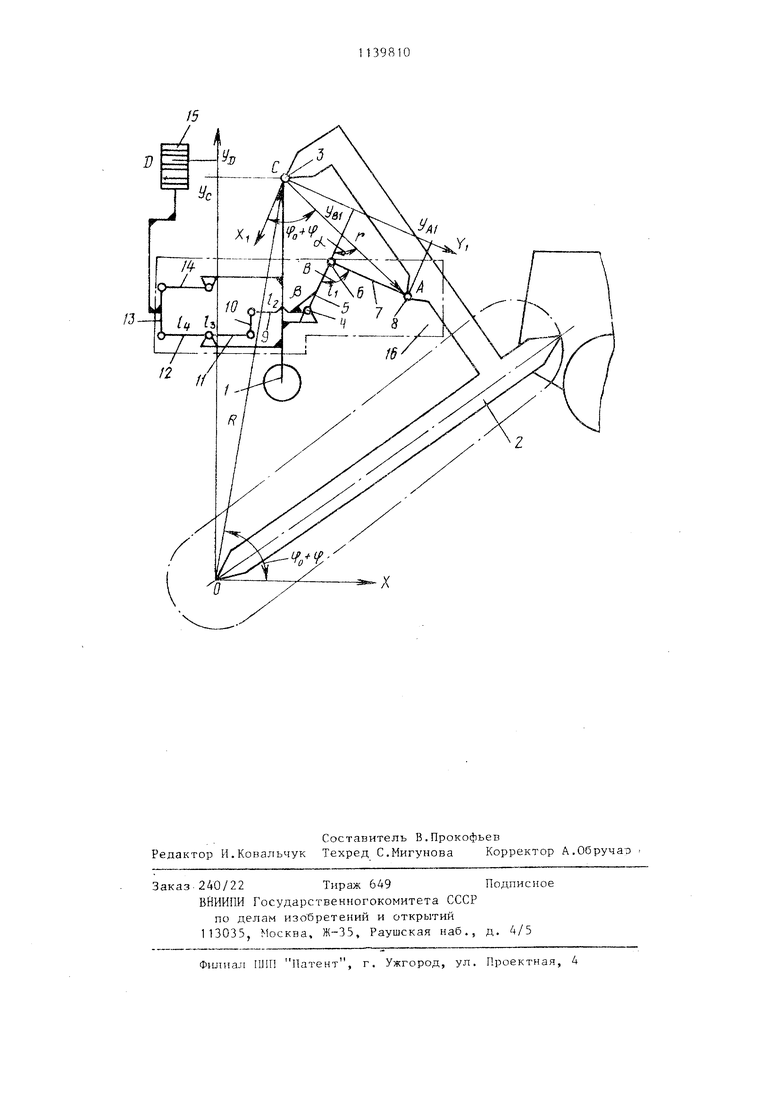
ДАТЧИК ВЕРТИКАЛЬНОГО ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА ЗЕНПЕРОЙНОЙ МАШИНЫ, включающий шарнирно связанный с рабочим органом маятник и механизм с рычагами преобразования угловых перемещений маятника относительно рабочего органа в перемещеи-ие указателя положения рабочего органа относительно копирной линии на величину, равную ошибке датчика из-за наклонов рабочего органа в плоскости качания маятника, о т л и ч а ющ и и с я тем, что, с целью повышения его точности за счет умепьпюния люфтов, он снабжен шариирно соединенными короь ыслом и шатуном, причем свободный конец коромысла шарнирно спязам с мaятникo и жестко - с рычагом механизма преобразова-ния угловых перег ;еще}Гий i-sanTHifKa, а свободный конец шатуна шарнирно связан с рабочий органом, при этом при отсутстви - наклоисв последнего шатун установлен перпе1щикулярно коромыслу, а угол между короьыслом и геометрической прямой, проходящей через шарниры связи маятника и шатуна с рабочим органом, равен уг.чу между горизонтапьной плоскостью и геометрической прямой, проходящей через шарнир связи маятника с рабочим органом и ТОЧКО1 на рабочем оргшге, вертикальное положение которой оп.ределяет его глубину копания. СО 00
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 4034490, кл | |||
| Пишущая машина | 1922 |
|
SU37A1 |
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
