Изобретение относится к строительному и дорожному машиностроению, вчастно- сти к машинам, в которых автоматически регулируется высотное положение рабочего органа.
Цель изобретения - повышение надежности датчика за счет гашения собственных колебаний маятника.
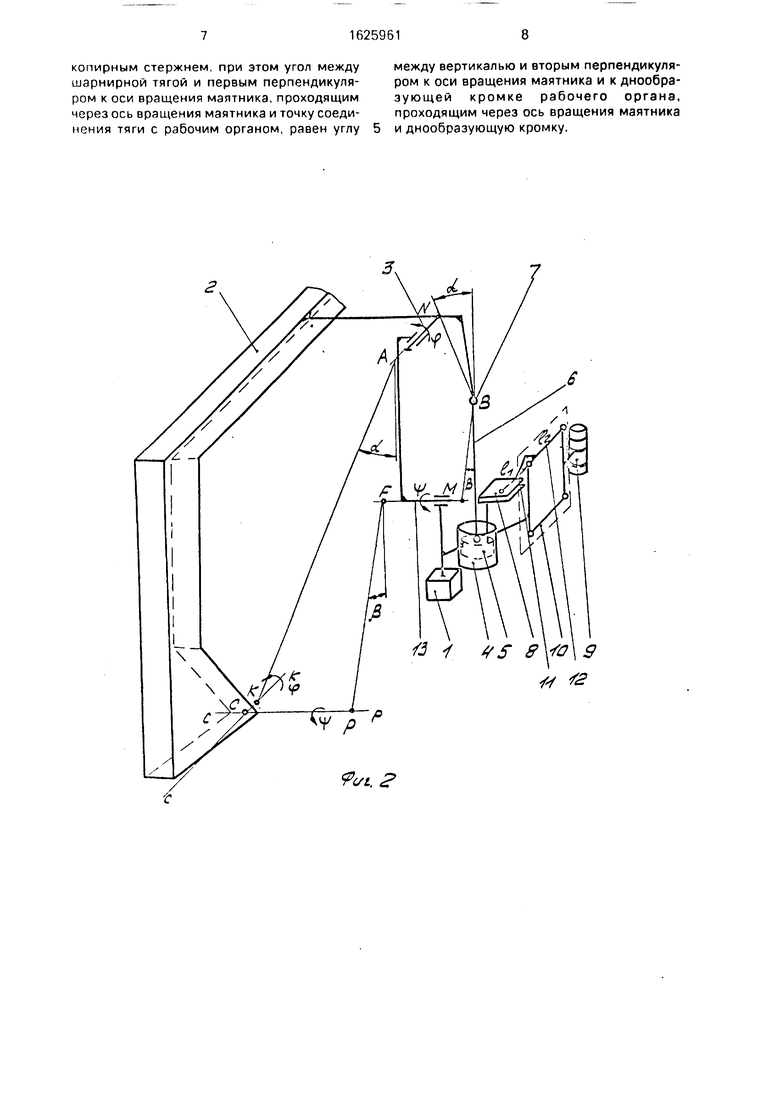
На фиг. 1 изображена конструкция датчика с одной осью вращения маятника отно- сигельно рабочего органа; на фиг. 2 - конструкция датчика с двумя осями вращения маятника относительно рабочего органа; на фиг. 3 - конструкция указателя в виде чувствительного элемента с опирающимся на копирный трос щупом.
Датчик вертикального положения рабочего органа землеройной машины (фиг. 1) содержит маятник 1, подвешенный к рабочему органу 2 с возможностью вращения относительно оси 3, гидравлический демпфер, состоящий из цилиндрического корпуса 4 и поршня 5, тягу 6, один конец которого шарнирно соединен с поршнем 5, а другой - с рабочим органом 2 с возможностью вращения относительно оси 7, компенсатор ошибки от наклонов рабочего органа и указатель положения рабочего органа. Компенсатор ошибки от наклонов рабочего органа включает копирный стержень 8, ко- пирную пластину 9, жестко закрепленную на поршне 5, и блок преобразования перемещений, выполненный в виде параллелог- раммного шарнирно-рычажного механизма
10,плечо 11 которого выполнено в виде рычага, соединенного с копирным стержнем 8, одно плечо 12 шарнирно-рычажного механизма 10, соседнее с первым плечом
11,жестко соединено с корпусом 4 гидравлического демпфера, а другое плечо 13 - с указателем 14 (например, фотоприемником) положения рабочего органа.
Угол между перпендикуляром ВА к оси вращения маятника обозначен через а. Этот угол равен углу, образованному с вертикалью перпендикуляром АС к оси вращения маятника, проходящим через точку С на днообразующей кромке рабочего органа.
Передаточное отношение блока 10 преобразования перемещения копирной пластины 9 в перемещение указателя 14 равно
отношению длин копирного стержня 8 и рычага 11, которое в свою очередь равно отношению длин перпендикуляров ВА и АС
0)
IBA .И
|дс 12
Маятник 1 датчика (фиг. 2) помимо оси 3 оснащен осью 15, что обеспечивает возможность вращения маятника относительно рабочего органа в двух плоскостях. Все
остальные элементы этого датчика аналогичны элементам датчика на фиг. 1. Перпендикуляр из точки В на геометрическую ось AN оси 3 обозначен через BN. Перпендикуляр из точки В на геометрическую ось FM
оси 15 обозначен через ВМ. Линии, параллельные осям AN и FM и проходящие через точку С на днообразующей кромке рабочего органа, обозначены соответственно через СК и СР. АК - это перпендикуляр к оси А и к
линии СК, FP - перпендикуляр к оси FM и к линии СР, Перпендикуляр АК образует с вертикалью угол а , равный углу, образованному перпендикуляром BN с шарнирной тягой 6. Перпендикуляр FP образует с вертикалью угол/}, равный углу, образованному с тягой 6 перпендикуляром ВМ.
Отношения длин перпендикуляторов равны между собой и равны передаточному отношению блока 10 преобразования перемещений
BN JI3M H
IAK IFP l2
Датчик работает следующим образом.
При повороте рабочего органа 2 (фиг. 1) вокруг линии, проходящей через точку С, происходит вертикальное перемещение оси 3 вместе с маятником 1 и поворот последнего на оси 3 относительно рабочего органа на тот же угол, что и поворот рабочего органа. В силу равенства угла о. для перпендикуляров ВА и АС перемещение точки В в направлении вдоль тяги 6 пропорционально вертикальному перемещению точки А (ошибке датчика из-зэ наклона рабочего органа) с коэффициентом IBA/IAC. Поскольку передаточное отношение блока 10 также IBA Н
равно
. :- , то вертикальное перемеще
ние указателя 14 под действием тяги 6, ко- пирной пластины 9 и блока 10 равно и обратно по знаку вертикальному перемещению точки А, чем достигается компенсация ошибки. Наличие гидравлического демпфера позволяет эффективно гасить собственные колебания маятника 1.
Аналогично работает датчик, показанный на фиг, 2. При повороте рабочего органа вокруг линии СК на угол р изменение вертикального положения точки А в пределах малых углов у (наклоны рабочего органа не бывают особенно большими) выражают формулой
АМдНдк sin i/)-cos(900-«).(3)
Маятник 1 также поворачивается относительно оси 3 на угол р , при этом изменение положения точки В в направлении вдоль тяги 6 выражают формулой, подобной выражению (3)
AhB lBN Sin p-cos(90P-«), (4) откуда следует, что A Ьв/А г)д(вгд/1Ак . Поскольку IBN/IAK-h/l2 , то выполняется тре- бование вертикального перемещения указателя 14 на величину А Мд.
Если одновременно с поворотом рабочего органа на угол р происходит его поворот вокруг линии СР на угол / , то маятник 1 поворачивается вокруг оси 15. что вызывает также изменение положения точки В в направлении вдоль тяги 6. пропорциональное длине перпендикуляра ВМ Поскольку при повороте рабочего органа на угол i/ одновременно изменяются длины перпендикуляров ВМ и FP, то пропорция IBM/IFP- h/Ъ сохраняется.
Таким образом обеспечивается компенсация ошибки от наклонов рабочего органа в двух плоскостях с одновременным де
45
50
55
10
15
2п
25
30
35
40
мпфированием собственных колебаний маятника 1.
Оси 3 и 15 могут быть расположены в одной плоскости, при этом ось 7 должна быть размещена над осью 3. В этом случае компенсация ошибки производится более точно, так как в этом случае полное геометрическое подобие соблюдается не только в среднем положении рабочего органа, но и при его поворотах вокруг линий СК и СР. Однако показанное на фигуре 2 расположение осей часто бывает более предпочтительным, а возникающая при этом дополнительная кинематическая ошибка незначительной.
Принцип действия датчика с указателем (фиг. 3) основан на том, что вращение щупа относительно чувствительного элемента 14 должно происходить только в случае вертикального перемещения днообразующей кромки и отсутствовать только в случае вертикального перемещения днообрэзующей кромки и при поворотах рабочего органа вокруг линий СК и СР (фиг. 2). Перемещение копирной пластины 8 пропорционально ошибке датчика в масштабе, который равен передаточному отношению блока 10, т.е. И/12. В силу этого при наклонах рабочего органа перемещение копирной пластины 8 вызывает такой поворот чувствительного элемента 14, что его относительное движение и щупа отсутствует.
Формула изобретения Датчик вертикального положения рабочего органа землеройной машины, включающий указатель положения рабочего органа относительно копирной линии, маятник, шарнирно связанный с рабочим органом, и компенсатор ошибки от наклонов рабочего органа, содержащий копирную пластину, блок преобразования перемещений и ко- пирный стержень, соединенный с входом последнего, отличающийся тем, что, с целью повышения надежности за счет гашения собственных колебаний маятника он снабжен тягой и гидравлическим демпфером, состоящим из цилиндрического корпуса и поршня, причем корпус демпфера закреплен на маятнике а поршень тягой шарнирно соединен г рабочим органом, при этом демпфер установлен с возможностью демпфирования колебаний маятника относительно рабочего органа, копирная псастича компенсатора ошибки жестко закреплена на поршне демпфера, а блок преобразования перемещений выполнен в виде шарнирно- рычажного механизма, одно плечо которого жестко соединено с корпусом демпфера другое - с указателем положения, а шнрнир - с
копирным стержнем, при этом угол между шарнирной тягой и первым перпендикуляром к оси вращения маятника, проходящим через ось вращения маятника и точку соединения тяги с рабочим органом, равен углу
между вертикалью и вторым перпендикуляром к оси вращения маятника и к днообра- зующей кромке рабочего органа, проходящим через ось вращения маятника и днообразующую кромку.
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик высотного положения рабочего органа землеройной машины (его варианты) | 1984 |
|
SU1208151A1 |
| Датчик высотного положения недоступной точки рабочего органа землеройной машины | 1987 |
|
SU1587148A1 |
| Датчик глубины копания рабочего органа дреноукладчика (его варианты) | 1981 |
|
SU1068580A1 |
| Датчик вертикального положения рабочего органа землеройной машины | 1983 |
|
SU1139810A1 |
| Устройство для слежения за высотным положением рабочего органа землеройной машины | 1984 |
|
SU1209782A1 |
| Устройство для измерения высотного положения рабочего органа строительных и дорожных машин | 1979 |
|
SU863786A1 |
| Гидравлический демпфер для маятниковой подвески датчика положения рабочего органа землеройной машины | 1984 |
|
SU1173014A2 |
| ЭЛЕКТРОННЫЙ НИВЕЛИР | 2024 |
|
RU2834921C1 |
| ВЙВЛЙОТЕГСА | 1966 |
|
SU184465A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВЫСОТНЫМ ПОЛОЖЕНИЕМ РАБОЧЕГО ОРГАНА ДРЕНОУКЛАДЧИКА | 2017 |
|
RU2650007C1 |

Изобретение относится к автоматическому регулированию высотного положения рабочего органа (РО) землеройной машины. Цель - повышение надежности датчика за счет гашения собственных колебаний маятника (М) 1, шарнирно связанного с РО 2. На М 1 закреплен корпус 4 гидравлического демпфера, поршень 5 которого тягой 6 соединен с PTD 2. На поршне 5 жестко закреплена копирная пластина 9 компенсатора
(/t.
Я 1 «S
« &
| Датчик глубины копания рабочего органа дреноукладчика (его варианты) | 1981 |
|
SU1068580A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
