1
2.Датчик высотного положения рабочего органа землеройной машины, включающий маятник, подвижно закрепленный в наружной раме карданова подвеса, указатель задачника высотного положения, компенсатор ошибки и узел суммирования перемещений задат- чика высотного положения и компенсатора, содержащий два выходных звена, причем выход узла суммирования соединен с исполнительным элементом, о тличающийся тем, что,
с целью повьппения надежности и точности, указатель задатчика в виде фотоприемника лазерного луча и подвижно установлен на маятнике в вертикальной направляющей с возможностью перемещений электромеханическим или электрогидравлическим приводом, содержащим систему управления с обратной связью, причем вход системы управления соединен электрически с выходом узла суммирования перемещений, одно из входных звеньев которого соединено кинематически с фотоприемником лазерного луча.
3,Датчик высотного положения рабочего органа землеройной мапганы.
Изобретение относится к устройствам автоматизации землеройной техники, в частности п)едназначено для землеройных машин с системой стабилизации положения рабочего органа относительно копирной линии, которой может служить трос, луч лазера или визирная ось теодолита, и может быть использовано в любом случае, когда требуется непрерывно измерять относительно копирной ли- нш высотное положение недоступной точки твердого тела, совершя ощего вертикальное перемещение в сочетании с вращением в двух вертикальных плоскостях.
Цель изобретения - повьш ение надежности и точности устройства при его длительной работе в условиях воздействия атмосферных осадков, за пылен ности, низких температур и т.п
51
включающий маятник, подвижно закрепленный в наружной раме карданова по веса, указатель задатчика высотного положения, компенсатор ошибки и узел суммирования перемещений задатчика высотного положения и компенсатора, содержащий два входных звена, причем выход узла суммирования соединен с исполнительным элементом, отличающийс я тем, что, с целью повышения надежности и точности, указатель задатчика выполнен в виде фотоприемника лазерного луча и установлен на маятнике, при этом наружная рама карданова подвеса установлена на рабочем органе с возможностью перемещения в вертикальном направлении электромеханическим или электрогидравлическим приводом, содержащим систему управления с обратной связь причем вход системы управления соединен электрически с выходом узла суммирования перемещений , при этом одно выходное звено последнего соединено кинематически с выходным звеном компенсатора, а другое - с рабочим органом.
На фиг. Г представлена конструкция датчика с механическим блоком передачи движения указателю от ведомого звена механизма преобразования
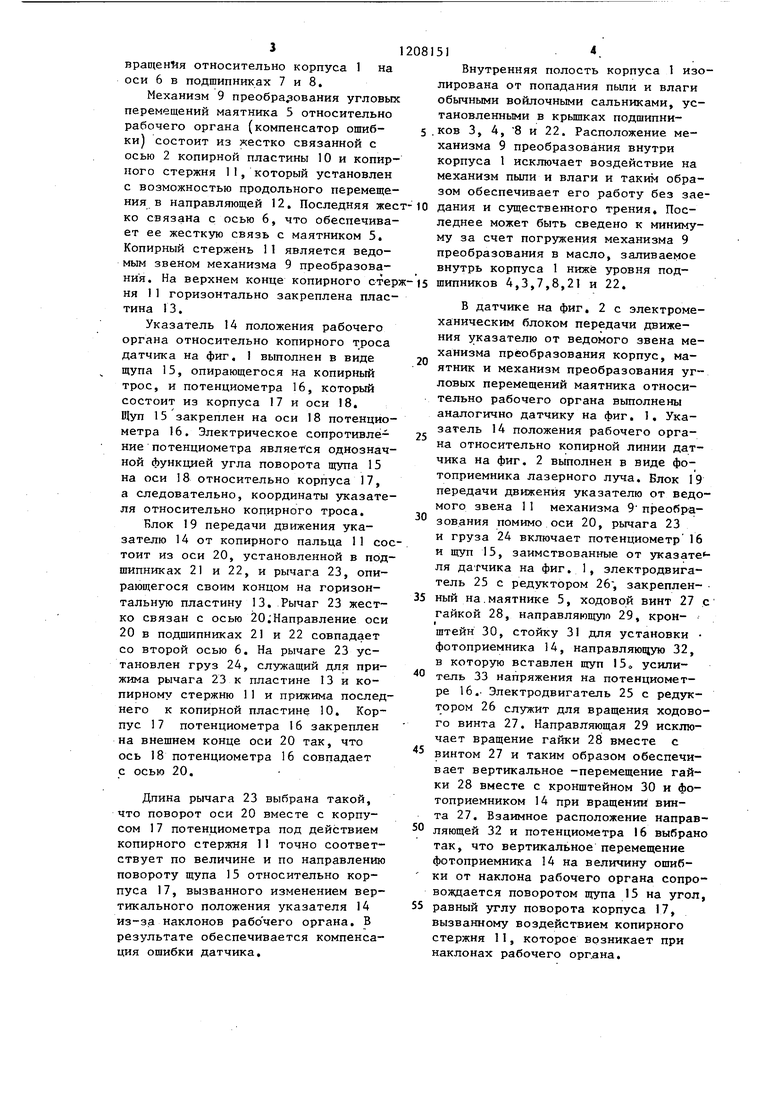
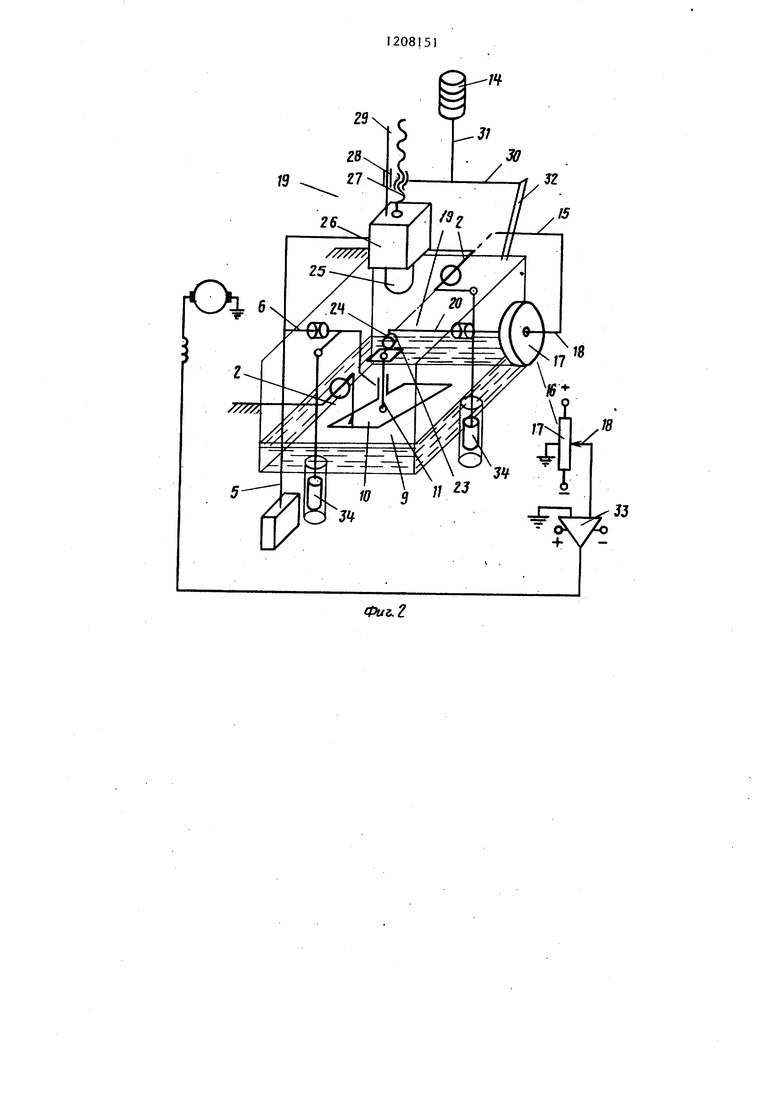
угловых перемещений маятника; на фиг. 2 - конструкция датчика с электромеханическим блоком передачи движения указателю от ведомого звена механизма преобразования; на
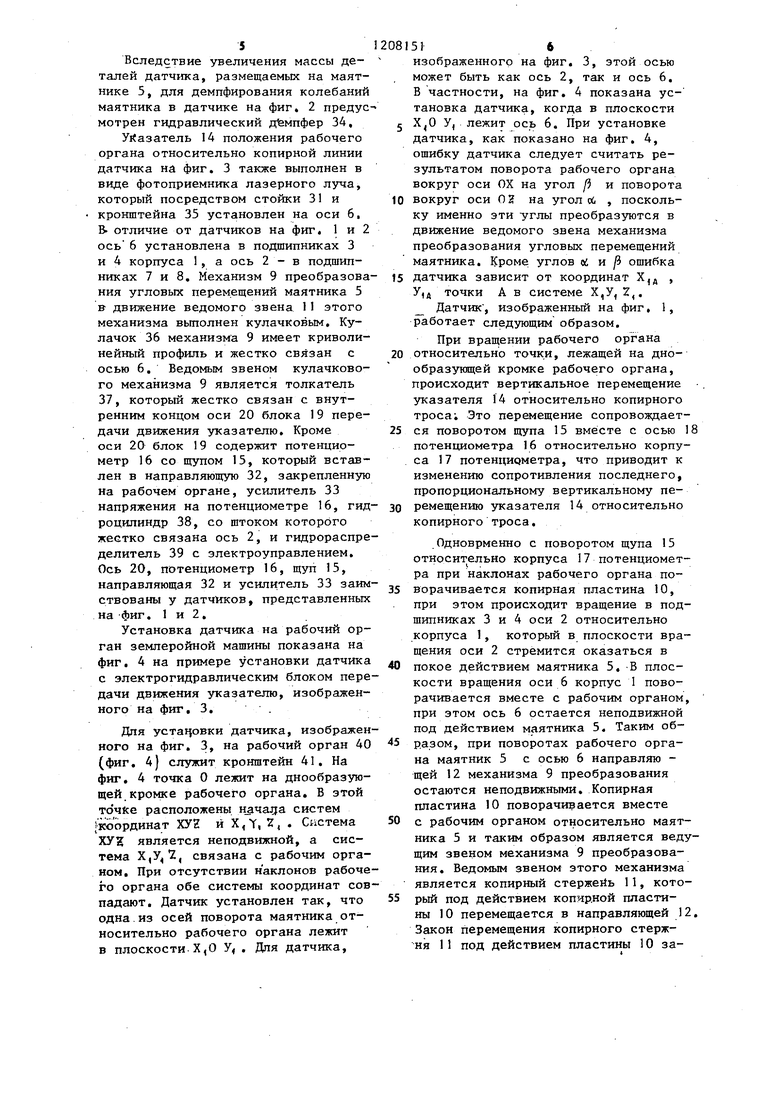
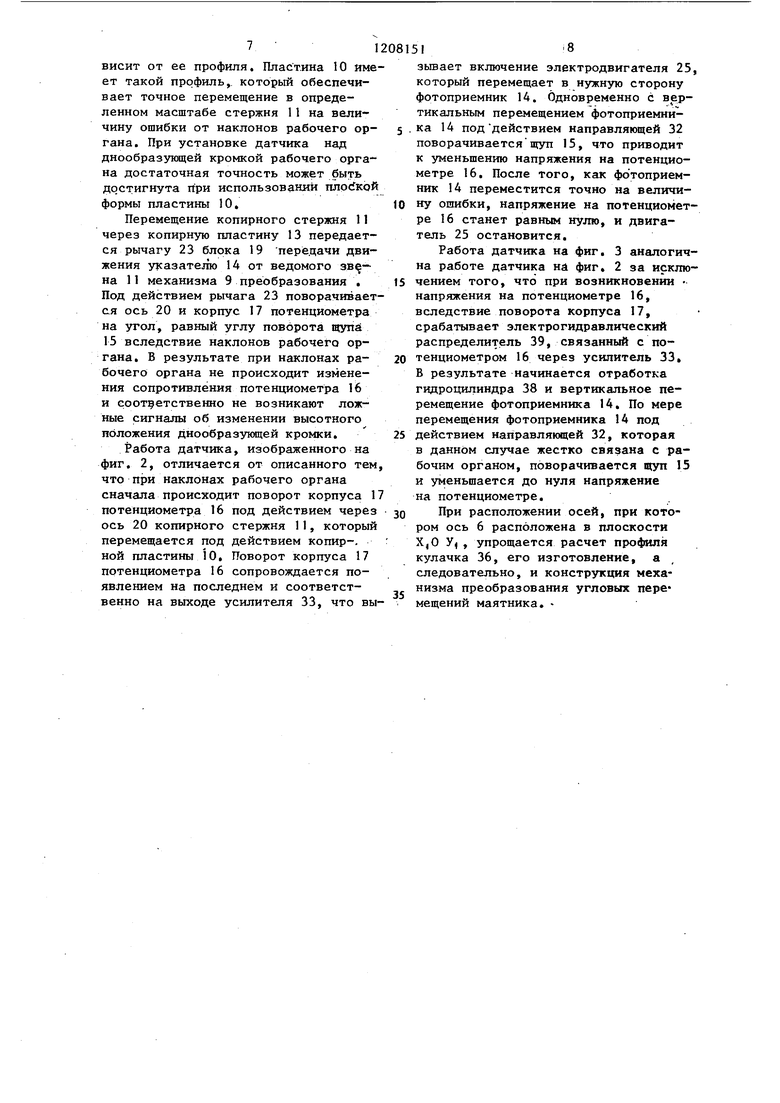
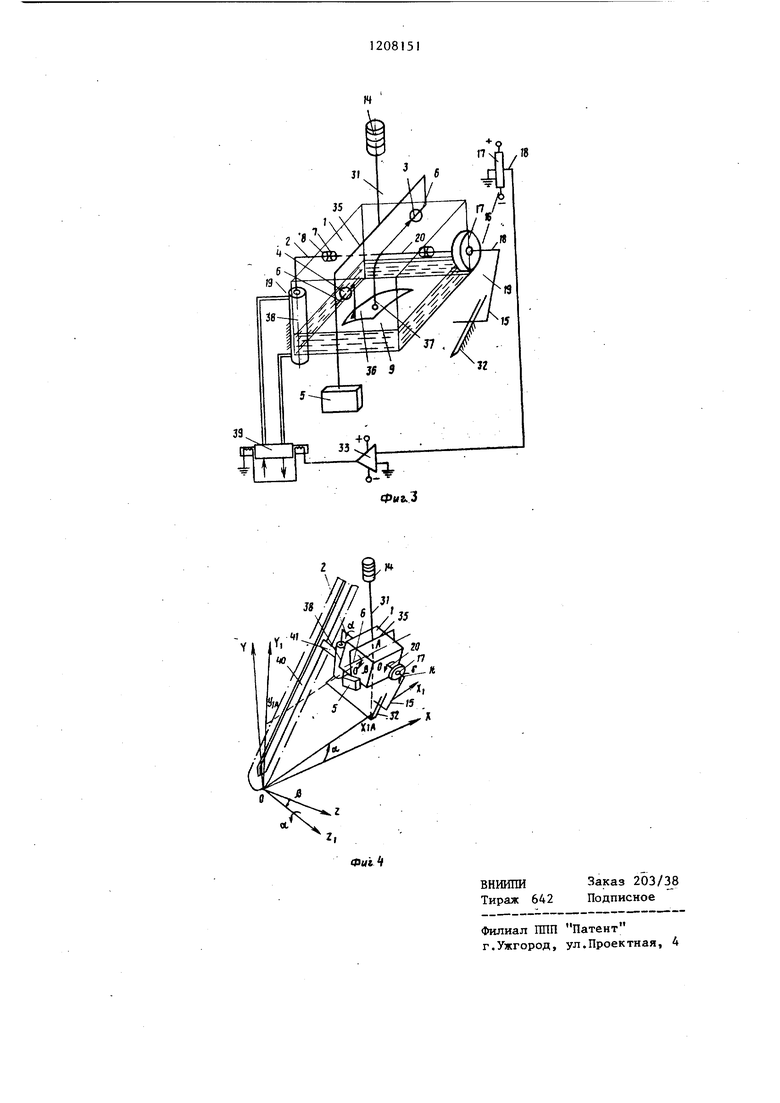
фиг. 3 - конструкция датчика с электрогидравлическим блоком передачи движения указателю от ведомого звена механизма преобразования; на фиг. 4 - установка датчика с электрогидравлическим блоком передачи движения указателю на рабочем органе землеройной машины.
Корпус (фиг. 1)присоединен к рабочему органу посредством оси 2 и
установлен с возможностью вращения вокруг этой оси на подшипниках 3 и 4. Маятник 5 установлен с возможностью
лращен я относительно корпуса 1 на оси 6 в подшипниках 7 и 8.
Механизм 9 преобразования угловых перемещений маятника 5 относительно рабочего органа (компенсатор ошибки) состоит из жестко связанной с осью 2 копирной пластины 10 и копир- пого стержня 11, который установлен с возможностью продольного перемещения в направляющей 12, Последняя жест-10 Дания и существенного трения, Поско связана с осью 6, что обеспечивает ее жесткую связь с маятником 5, Копирный стержень 11 является ведомым звеном механизма 9 преобразования. На верхнем конце копирного стерж
ня 11 горизонтально закреплена пластина 13.
Указатель 14 положения рабочего органа относительно копирного троса датчика на фиг, 1 выполнен в виде щупа 15, опирающегося на копирный трос, и потенциометра 16, который состоит из корпуса 17 и оси 18, Щуп 15 закреплен на оси 18 потенциометра 16. Электрическое сопротивление потенциометра является однозначной функцией угла поворота щупа 15 на оси 18 относительно корпуса 17, а следовательно, координаты указателя относительно копирного троса.
Блок 19 передачи движения указателю 14 от копирного пальца 11 сотоит из оси 20, установленной в подшипниках 21 и 22, и рычага 23, опирающегося своим концом на горизонтальную пластину 13, Рычаг 23 жест- осью 20;Направление оси 21 и 22 совпадает На рычаге 23 установлен груз 24, служащий для прижима рычага 23 к пластине 13 и ко- пирному стержню 11 и прижима последнего к копирной пластине 10, Корпус 17 потенциометра 16 закреплен на внещнем конце оси 20 так, что ось 18 потенциометра 16 совпадает с осью 20,
Дпина рычага 23 выбрана такой, что поворот оси 20 вместе с корпусом 17 потенциометра под действием копирного стержня 11 точно соответствует по величине и по направлению повороту щупа 15 относительно корпуса 17, вызванного изменением вертикального положения указателя 14 из-за наклонов рабо чего органа, В результате обеспечивается компенсация ошибки датчика.
ко связан с
20 в подшипниках
со второй осью 6
Внутренняя полость корпуса 1 изолирована от попадания пыли и влаги обычными войлочными сальниками, установленными в крьшках подшипни- .ков 3, 4, 8 и 22. Расположение механизма 9 преобразования внутри корпуса 1 исключает воздействие на механизм пыли и влаги и таким образом обеспечивает его работу без заешипников 4,3,7,8,21
леднее может быть сведено к минимуму за счет погружения механизма 9 преобразования в масло, заливаемое внутрь корпуса 1 ниже уровня поди 22,
В датчике на фиг, 2 с электромеханическим блоком передачи движения указателю от ведомого звена механизма преобразования корпус, маятник и механизм преобразования угловых перемещений маятника относительно рабочего органа вьтолнены аналогично датчику на фиг, 1, Указатель 14 положения рабочего органа относительно копирной линии датчика на фиг. 2 выполнен в виде фотоприемника лазерного луча. Блок 19 передачи движения указателю от ведомого звена 11 механизма 9 преобразования помимо оси 20, рычага 23 и груза 24 включает потенциометр 16 и щуп 15, заимствованные от указате - ля датчика на фиг. 1, электродвигатель 25 с редуктором 26, закреплен-
ный на.маятнике 5, ходовой винт 27 с гайкой 28, направляющу1п 29, кронштейн 30, стойку 31 для установки фотоприемника 14, направляющую 32, в которую вставлен щуп 15 усилитель 33 напряжения на потенциометре 16,. Электродвигатель 25 с редуктором 26 служит для вращения ходового винта 27. Направляющая 29 исключает вращение гайки 28 вместе с
винтом 27 и таким образом обеспечивает вертикальное -перемещение гайки 28 вместе с кронштейном 30 и фотоприемником 14 при вращении винта 27. Взаимное расположение направляющей 32 и потенциометра 16 выбрано
фотоприемника 14 на величину ошиб- ки от наклона рабочего органа сопровождается поворотом щупа 15 на угол, 55 равный углу поворота корпуса 17, вызванному воздействием копирного стержня 11, которое возникает при наклонах рабочего органа.
Вследствие увеличения массы деталей датчика, размещаемых на маятнике 5, для демпфирования колебаний маятника в датчике на фиг, 2 предус- мотрен гидравлический дfeмпфep 34,
Указатель 14 положения рабочего органа относительно копиркой линии датчика на фиг, 3 также выполнен в виде фотоприемника лазерного луча, который посредством стойки 31 и кронштейна 35 установлен на оси 6, В отличие от датчиков на фиг. 1 и 2 ось 6 установлена в подшипниках 3 и 4 корпуса 1, а ось 2 - в подшипниках 7 и 8, Механизм 9 преобразования угловых перемещений маятника 5 движение ведомого звена 1I этого механизма вьтолнен кулачковым. Кулачок 36 механизма 9 имеет криволинейный профиль и жестко связан с осью 6, Ведомым звеном кулачкового механизма 9 является толкатель 37, который жестко связан с внутренним концом оси 20 блока 19 передачи движения указателю. Кроме оси 20 блок 19 содержит потенциометр 16 со щупом 15, который вставлен в направляющую 32, закрепленную на рабочем органе, усилитель 33 напряжения на потенциометре 16, гид- роцилиндр 38, со штоком которого жестко связана ось 2, и гидрораспределитель 39 с электроуправлением, Ось 20, потенциометр 16, щуп 15, направляющая 32 и усилитель 33 заимствованы у датчиков, представленных на фиг, 1 и 2,
Установка датчика на рабочий орган землеройной машины показана на фиг, 4 на примере установки датчика с электрогидравлическим блоком передачи движения указателю, изображенного на фиг, 3, .
Для устаг овки датчика, изображенного на фиг, 3, на рабочий орган 40 (фиг, 4) служит кронштейн 41, На фиг, 4 точка О лежит на днообразую- щей кромке рабочег о органа, В этой точке расположены начала систем координат ХУЕ и X,Y, Z, , Система ХУК является неподвижной, а система связана с рабочим органом. При отсутствии наклонов рабочего органа обе системы координат сов- падают. Датчик установлен так, что одна.из осей поворота маятника относительно рабочего органа лежит в плоскости.X,О У« , Для датчика.
081516
изображенного на фиг, 3, этой осью может быть как ось 2, так и ось 6, В частности, на фиг, 4 показана ус- тановка датчика, когда в плоскости 5 Х,0 У, лежит ось 6, При установке датчика, как показано на фиг, 4, ошибку датчика следует считать результатом поворота рабочего органа вокруг оси ОХ на угол ft и поворота 10 вокруг оси ОН на угол об , поскольку именно эти углы преобразуются в движение ведомого звена механизма преобразования угловых перемещений маятника, Кроме углов ci и ошибка 5 датчика зависит от координат , У,д точки А в системе Х,У, Z,, Датчик , изображенный на фиг, 1, работает следующим образом.
При вращении рабочего органа 20 относительно точки, лежащей на дно- образукщей кромке рабочего органа, происходит вертикальное перемещение указателя 14 относительно копирного троса; Это перемещение сопровождает- 25 ся поворотом щупа 15 вместе с осью 18 потенциометра 16 относительно корпуса 17 потенциометра, что приводит к изменению сопротивления последнего, пропорциональному вертикальному пезо ремещению указателя 14 относительно копирного троса,
.Одноврменно с поворотом щупа 15 относит ельно корпуса 17 потенциометра при наклонах рабочего органа по35 ворачивается копирная пластина 10, при этом происходит вращение в подшипниках 3 и 4 оси 2 относительно корпуса 1, который в плоскости вращения оси 2 стремится оказаться в
0 покое действием маятника 5,-В плоскости вращения оси 6 корпус 1 поворачивается вместе с рабочим органом, при этом ось 6 остается неподвижной под действием маятника 5, Таким об5 разом, при поворотах рабочего органа маятник 5 с осью 6 направляю - щей 12 механизма 9 преобразования остаются неподвижными, Копирная пластина 10 поворачивается вместе
0 с рабочим органом относительно маятника 5 и таким образом является ведущим звецом механизма 9 преобразования. Ведомым звеном этого механизма является копирный стержейь 11, кото5 рый под действием копир.ной пластины 10 перемещается в направляющей 12, Закон перемещения копирного стержня 11 под действием пластины 10 зависит от ее профиля. Пластина 10 имеет такой профиль, который обеспечивает точное перемещение в определенном масштабе стержня 11 на величину ошибки от наклонов рабочего органа. При установке датчика над днообразующей кромкой рабочего орга на достаточная точность может быть достигнута при использовании плоской формы пластины 10.
Перемещение копирного стержня 11 через копирную пластину 13 передается рычагу 23 блока 19 передачи движения указателю 14 от ведомого на 11 механизма 9 преобразования , Под действием рычага 23 поворачивается ось 20 и корпус 17 потенциометра на угол, равный углу поворота щупа 15 вследствие наклонов рабочего органа. В результате при наклонах рабочего органа не происходит изменения сопротивления потенциометра 16 и соответственно не возникают ложные сигналы об изменении высотного положения днообразующей кромки.
Работа датчика, изображенного на фиг. 2, отличается от описанного тем что при наклонах рабочего органа сначала происходит поворот корпуса 17 потенциометра 16 под действием через ось 20 копирного стержня 11, который перемещается под действием копир-. ной пластины 10. Поворот корпуса 17 потенциометра 16 сопровождается появлением на последнем и соответственно на выходе усилителя 33, что вы
зывает включение электродвигателя 25, который перемещает в нужную сторону фотоприемник 14. Одновременно с вертикальным перемещением фотоприемника 14 под действием направляющей 32 поворачивается щуп 15, что приводит к уменьшению напряжения на потенциометре 16. После того, как фо топрием- ник 14 переместится точно на величину ошибки, напряжение на потенциометре 16 станет равным нулю, и двигатель 25 остановится.
Работа датчика на фиг. 3 аналогична работе датчика НА фиг, 2 за исключением того, что при возникновении напряжения на потенциометре 16, вследствие поворота корпуса 17, срабатывает электрогидравлический распределитель 39, связанный с потенциометром 16 через усилитель 33, В результате начинается отработка гидроцилиндра 38 и вертикальное перемещение фотоприемника 14. По мере перемещения фотоприемника 14 под действием направляющей 32, которая в данном случае жестко связана с рабочим органом, поворачивается щуп 15 и уменьшается до нуля напряжение на потенциометре.
При расположении осей, при котором ось 6 расположена в плоскости Х,0 У( , упрощается расчет профиля кулачка 36, его изготовление, а следовательно, и конструкция механизма преобразования угловых перемещений маятника,
19
29
Фиъ.2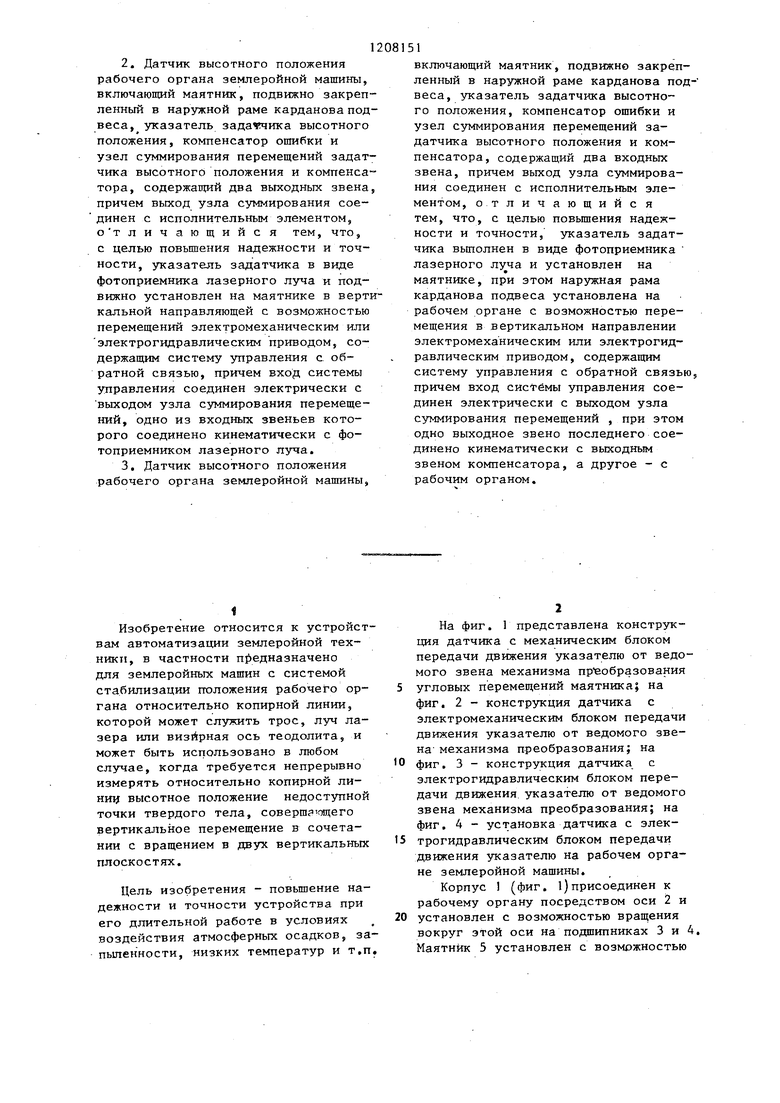
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик вертикального положения рабочего органа землеройной машины | 1985 |
|
SU1625961A1 |
| Датчик высотного положения недоступной точки рабочего органа землеройной машины | 1987 |
|
SU1587148A1 |
| Датчик глубины копания рабочего органа дреноукладчика (его варианты) | 1981 |
|
SU1068580A1 |
| Устройство для измерения высотного положения рабочего органа строительных и дорожных машин | 1979 |
|
SU863786A1 |
| Устройство одновременного управления высотным и поперечно-угловым положениями рабочего органа землеройной машины | 1977 |
|
SU734353A1 |
| Датчик положения рабочего органа землеройно-транспортной машины | 1980 |
|
SU901416A1 |
| Датчик вертикального положения рабочего органа землеройной машины | 1983 |
|
SU1139810A1 |
| Гидравлический демпфер для маятниковой подвески датчика положения рабочего органа землеройной машины | 1984 |
|
SU1173014A2 |
| Датчик положения рабочего органа землеройной машины | 1984 |
|
SU1239232A2 |
| Датчик глубины копания землеройной машины непрерывного действия | 1978 |
|
SU740903A1 |
1. Датчик высотного положения рабочего органа землеройной машины, например дреноукладчика, включающий маятник, подвижно закреплеиный в наружной ра:ме карданова подвеса, указатель задатчика высотного положения, компенсатор ошибки и узел суммирования перемещений задатчнка ЙОЯ высотного положения и компенсатора, содержащий два входных звена, причем выход узла суммирования соединен с исполнительным элементом, отличающийся тем, что, с целью повышения надежности и точности, наружная рама карданова подвеса подвижно закреплена на рабочем органе и выполнена в виде полого корпуса, внутри которого размещен компенсатор ошибки, при .этом компенсатор ошибки состоит из двух входных звеньев,, одно из которых жестко связано с рабочим органом, а другое - с маятником, и выходного звена в виде оси, подвижно закрепленной в полом корпусе соосно с осью вращения маятника, а ось подвеса маятника перпендикулярна оси подвеса полого корпуса , при этом одно входное звено узла суммирования перемещений соединено кинематически с выходным звеном компенсатора, а другое - с указателем задатчика высотного положения.. (Л tND О 00 ел Иа1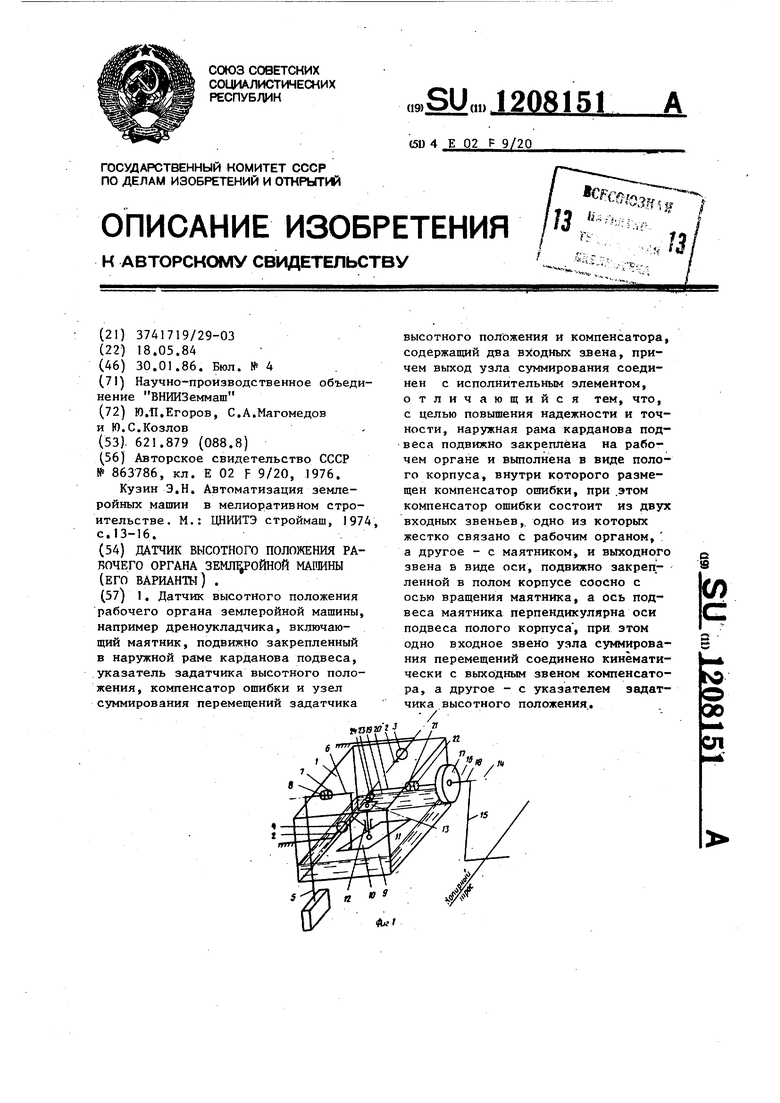
ВНИИПИ Заказ 203/38 Тираж 642 Подписное
Филиал ППП Патент г.Ужгород, ул.Проектная, А
| Устройство для измерения высотного положения рабочего органа строительных и дорожных машин | 1979 |
|
SU863786A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кузин Э.Н | |||
| Автоматизация землеройных машин в мелиоративном строительстве | |||
| М.: ЦНИИТЭ строймаш, 1974, с.13-16. | |||
