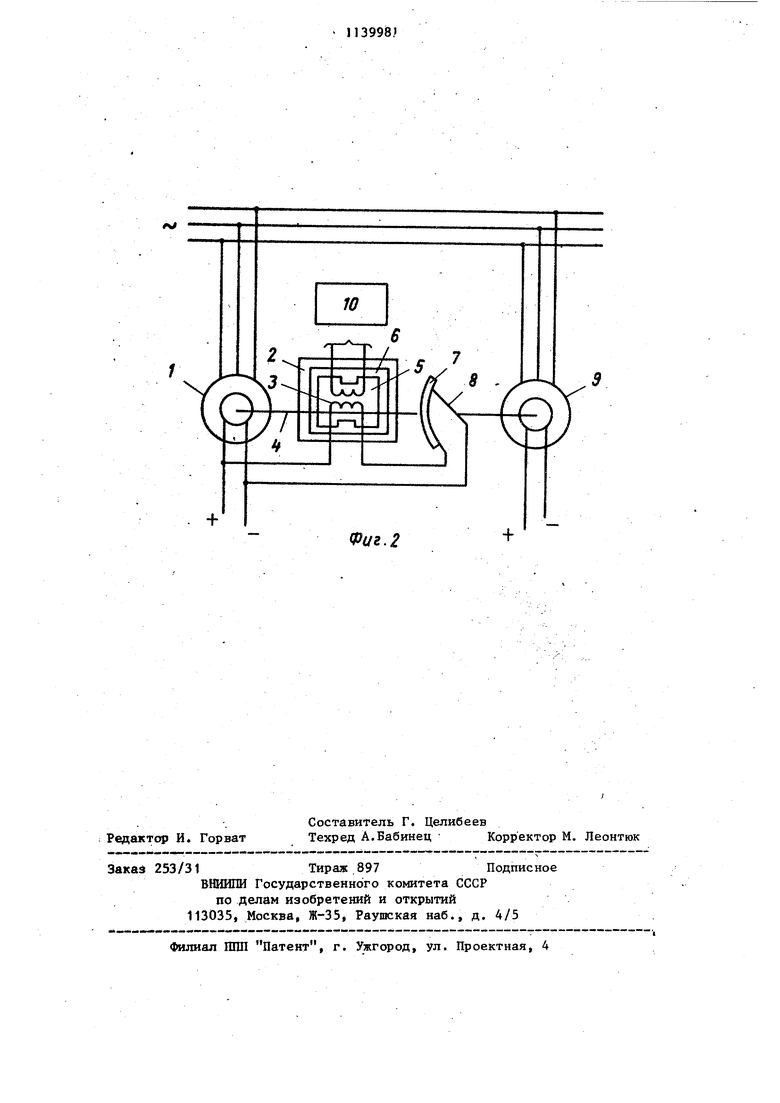
Изобретение относится к измерительной технике и может быть исполь зовано при измерении и определении моментных характеристик синхронных электродвигателей, а также в системах автоматического управления приводами. Известно устройство для измерения вращающего момента, содержащее индуктивньй преобразователь угла закручивания вала, пропорционального передаваемому моменту, в электри ческий сигнал 1j . Однако извест.ное устройство не обеспечивает требуемой точности измерения. Наиболее близким к предлагаемому по технической сущности и достигаемому результату является устройство для измерения вращающего момента.си хронного электродвигателя, содержащее синхронный приводной электродвигатель, установленньй на основании, датчик угла взаимного поворота валов испытуемого и приводного элек рол;вигателей, блок питания и регист рирующее устройство 2J . Недостатками данного устройства являются низкая точность измерения и сложность конструкции. Цель изобретения - повьшение точ ности измерения и упрощение констру ции . Указанная цель достигается тем, что в устройстве для измерения вращающего момента синхронного электродвигателя, содержащем синхронный приводной электродвигатель, установ ленный на основании, датчик угла вз аимного поворота валов испытуемог и приводного Электродвигателей, бло питания и регистрирующее устройство датчик угла вьшолнен в виде переменного резистора и индуктивного пр образователя, подвижная обмотка которого размещена на валу приводного двигателя, а неподвижная связана с основанием и соединена с регистри рующим устройством, причем корпус обмотки переменного резистора и ось подвижного контакта жестко связаны соответственно с валом приводного и валом испытуемого электродвигателей переменный резистор электрически последовательно соединен с подвижно обмоткой индуктивного преобразователя и контактными кольцами привод кого электродвигателя. На фиг. 1 представлено предлагаемое устройство, общий вид; на фиг.2 электрическая схема. Устройство для измерения вращающего момента синхронного электродвигателя (фиг. 1 и 2) содержит приводной синхронный электродвигатель 1 малой мощности, ивдуктивный преобразователь 2 с подвижной обмоткой 3, размещенной на валу 4 приводного электродвигателя 1, и неподвижной обмоткой 5, размещенной на полюсах магнитопривода 6, связанного с основанием, а также переменный резистор 7, корпус обмотки которого жестко связан с валом электродвигателя 1, а ось 8 подвижного контакта - с валом испытуемого синхронного электродвигателя 9. Синхронные частоты вращения электродвигателей 1 и 9 должны быть одинаковыми, кроме того, резистор 7 электрически по последовательной схеме соединен с подвижной обмоткой 3 индуктивного преобразователя 2 и контактными кольцами приводного двигателя 1 (в случае применения синхронного двигателя 1 с постоянными магнитами питание обмотки 3 может быть , взято с контактных колец испытуемого синхронного двигателя 9). Неподвижная обмотка 5 своими концами подключена к выходным зажимам преобразователя 2, с которых при работе устройства снимается напряжение, пропорциональное развиваемому двигателем 9 моменту, и глодается на регистрирующее устройство 10 или в систему управления испытуемого двигателя. Переменный резистор и индуктивный преобразователь представляют собой датчик угла взаимного рассогласования валов испытуемого и приводного электродвигателей. Устройство работает следующим образом. При подаче напряжения на синхронные двигатели 1 и 9 двигатель 9 разгоняется одним из известных способов- и приводит во вращение, например с помощью поводка (не показан) двигатель 1. При отсутствии нагрузки на валу двигателя 9 роторы обоих двигателей вращаются синхронно: без сдвига в пространстве относительно друг друга. Также синхронно без сдвига вращаются жестко соединенные с валом вигателя 1 корпус обмотки переменного резистора 7 и его ось 8 с подв ным контактом, соединенная жестко с валом двигателя 9. Ось 8 с подвижным контактом установлены таким образом, что величина сопротивления, введенного в цепь подвижной обмотки 3, имеет максимальное значение. При протекании тока через подвижную обмотку 3 создается магнитный поток вращающийся вместе с обмоткой и зам кающийся через магнитопров.од 6, на котором размещена неподвижная обмот ка 5. В обмотке 5 вращакяцийся магнитный поток наведен ЭДС. Так как ток в обмотке 3 минимальный, величи на ЭДС, наведенная в обмотке 5, тож минимальна и соответствует нулевому значению моменту синхронного двигателя 9.. При наличии момента нагрузки на валу синхронного двигателя 9 происходит сдвиг его ротора относительно вращающегося магнитного поля статор на угол Q , величина которого npono циональна моменту сопротивления, прилаженному к валу, что следует из выражения- ЗЕр. V sin 9 , х- Пв где М - момент электродвигателя; EQ- ЭДС, индуктируемая полем ротора; V - напряжение сети; SJg- синхронная частота вращения ротора; X - синхронное сопротивление двигателя; 0 угол отставания ротора. В то же время двигатель 1 продолжает работать вхолостую и положение его ротора относительно магнитного поля статора не изменяется. В результате имеет сдвиг на угол 8 ротора двигателя 9 относительно ротора двигателя 1 и, следовательно, сдвиг на тот же угол Q подвижного контакта, жестко соединенного через ось 8 с валом двигателя, относительно обмотки резистора 7, жестко соединенной с «алом двигателя 1. При перемещении подвижного контакта резистора 7 уменьшается величина его сопротивления, включенного в цепь подвижной обмотки 3, что приводит к соответствующему увеличению тока в этой цепи, магнитного потока обмотки 3 и величины ЭДС, наводимой в неподвижной обмотке 5. Увеличение ЭДС на выходе неподвижной обмотки 5 пропорционально углу 9 сдвига роторов двигателей 1 и 9, т.е. пропорционально моменту, развиваемому двигателем 9. При постоянном напряжении сети и токе возбуждения двигателя (т.е. ЭДС Eg) Момент двигателя 9 изменяется пропор1 онально углу О в преде- лах 5 i соответ.ствующих устойчивой работе синхронного двигателя. Использование в устройстве датчика угла взаимного положения валов приводного и испытуемого электродвигателей, выполненного в виде последовательно соединенных переменного зистора и индуктивного преобразователя, позволяет повысить точность измерения вращающего момента и упростить конструкцию.

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТАБИЛИЗАЦИИ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА (ВАРИАНТЫ) | 2000 |
|
RU2164053C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭДС РОТОРА СИНХРОННЫХ И ТОКА РОТОРА АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ (ЕГО ВАРИАНТЫ) | 2001 |
|
RU2207578C2 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2012 |
|
RU2482596C1 |
| Стенд для испытания механических передач | 1987 |
|
SU1490524A1 |
| Установка для испытания редуктора | 2023 |
|
RU2809048C1 |
| Устройство для намотки нити | 1978 |
|
SU745840A1 |
| Устройство для неразрушающего контроля поверхности электропроводящих объектов | 1989 |
|
SU1682903A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2002 |
|
RU2231208C2 |
| СПОСОБ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИКИ ВОЗДУШНЫХ ЗАЗОРОВ В ЭЛЕКТРИЧЕСКИХ МАШИНАХ | 2000 |
|
RU2192701C2 |
| Способ работы двигателя Стирлинга | 1985 |
|
SU1270395A1 |
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВРАЩАЩЕГО МОМЕНТА СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ, ,содержащее синхронный приводной электродвигатель, установленный на основании, датчик угла взаимного поворота валов испытуемого и приводного электродвигателей, блок питания и регистрирующее устройство, о т л и ч а ю. щ е е с я тем, что, с целью повышения точности измерения и упрощения конструкции, в нем датчик угла выполнен в виде переменного резистора и индуктивного пре.образователя, подвижная обмотка которого размещена на валу приводного двигателя, а непЪдвижная связана с основанием и соединена с регистрирукяим устройством, причем корпус обмотки переменного резистора и ось подвижного контакта жестко связаны соответственно с валом приводного и валом испытуемого электродвигателей « переменный резистор электрически последовательно соединен с подвижной обмоткой индуктивного преобразователя и контактными кольцами приводного электродвигателя. СО СО 00
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Фролов Л.Б., Измерение кру тящего момента | |||
| М., Энергия, 1967, с | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для определения вращающего момента электродвигателя | 1976 |
|
SU594417A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
