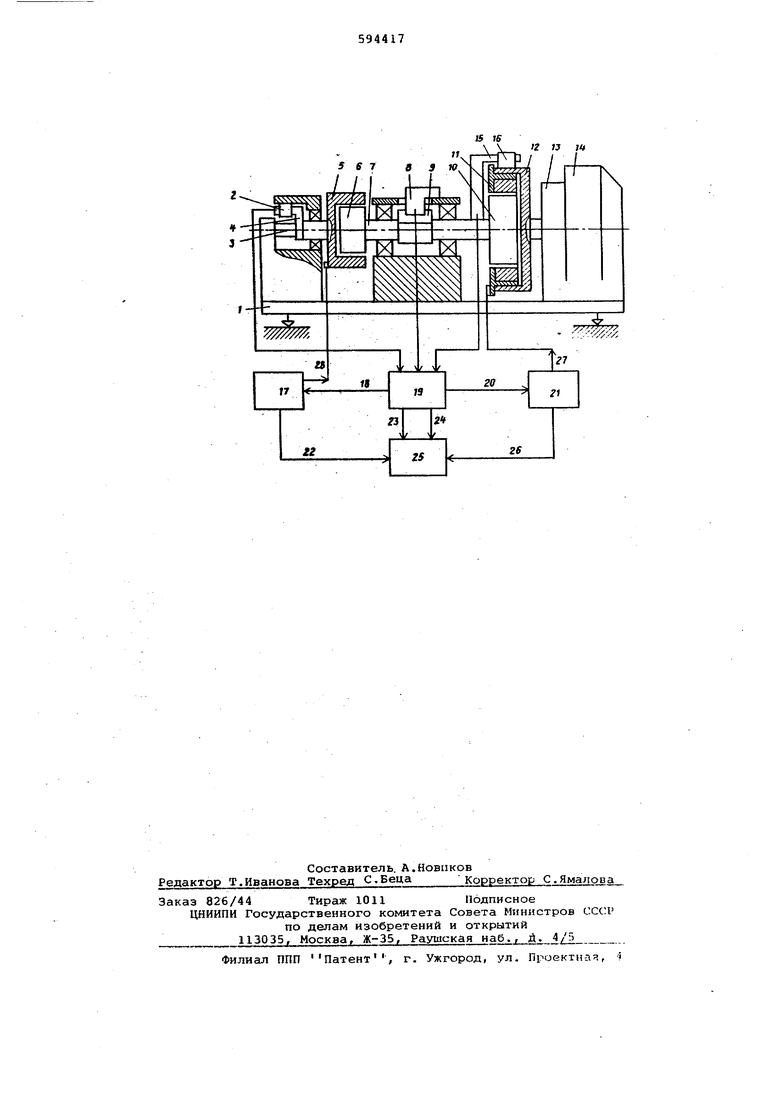
На чертеже представлено предлагаемое устройство для определения вращающего момента электродвигателя. Устройство содержит корпус 1, в ко тором закреплен статор образцового датчика 2 угла. Образцовый датчик угл предназначен для определения эадаваемого .вращающего момента путем измерения угла закручивания чувствительной части вала 3, соединенного с корпусом 1 и с ротором 4 образцового датчика угла, а также со статором 5 задающего моментного электродвигателя. Ротор б задающего моментного элек тродвигателя жестко соединен с валом 7, на котором закреплен ротор 8 измерительного датчика утла. Статор 9 измерительного датчика угла неподвижен относительно корпуса 1. Ротор 10 испытуемого электродвигателя через вал 7 жестко соединен с ротором б задающего моментного электродвигателя, а статор 11 установлен в обойму 12, которая соединена через редуктор 13 с приводным электродвигателем 14, закрепленным в корпусе 1. Ротор 15 Дополнительного датчика угла Закреплен на валу 7,. а статор J6 на обойме 12. Блок 17 формирования, сигнала, вырабатывающий заданный закон изменения вращающего моменда в функции угла поворота ротора 10 испытуемого электродвигателя 14 относительно., его .статора 9, цепью 18 соединен с. блоком сравнения 19, который представляет собой трехканальный усилитель-преобразователь. Блок сравнения 19 соединен цепью 20 с блоком питания 21 испытуемого электродвигателя. Блок 17 формирования сигнала через цепь 22 задающего момента и блок сравнения 19 через цепь 23 измеряемого момента и цепь 24 угла поворота ротора испытуемого электродвигателя соединены с регистрирующим блоком 25, который для регистрации тока питания испытуемого электродвигателя соединен цепью 26 с блоком питания 21. Напряжение питаний через цепь 27 подается от блока питаг ния 21 на статор 11 испытуемого; электродвигателя и через цепь 28 от блока формирования 17.- на статор 5 задаю щего электродвигателя. Приводной электродвигатель 14 чере редуктор 13 поворачивает статор 11 ис пытуемого электродвигателя относитель но ротора 10 на угол oL , который из меряется дополнительным датчиком угла Л. . Соответствующий углу di. с.игна датчика угла усиливается;блоком сравнения 19 и через цепь 18 поступает в блок формирования сигнала,, который формирует закон изменения момента испытуемого электродвигателя в диапазон изменения угла сС .от нуля до 21Г. .Для создания желаемого момента сигнал изменяющийся по данному закону, подается на статор 5 задающего моментного электродвигателя. От блока питания 21 на испытуемый электродвигатель подается такое-напряжение, чтобы вал находился в равновесии. Нарушение равновесия, т.е. неравенство моментов задающего и испытуемого электродвигателей, определяется измерительным датчиком угла, сигнал которого для соответствующего изменения напря жения испытуемого электродвигателя через блок сравнения 19 и цепь обратной связи 20 подается в блок питания 21. Моменты задающего и испытуемого электродвигателей выравниваются, Вращающий момент задающего электродвигателя определяется образцовым Датчиком угла, измеряющим угол закру чивания чувствительной части вала 3, и регистрируется в блоке 25, где регистрируются также момент и ток испыхуемогр электродвигателя и угол по ворота (АФормула изобретения Устройо-гво для определения вращающего момента электродвигателя, содержащее корпус, установленный в нем приводной электродвигатель, с редуктором, выходной вал которого жестко связан со статором электродвигателя, образцовый датчик .угла с ротором, связанным через упругий элемент с корпусом и. неподв-ижным- относительно корпуса с-татрррм/ блок питания и регистрирующий блок , сУТ л и ч а ю щ е е с я тем, :чтс, с целью повышения точности измерения, в него введены блок формирования сигнала, первый выход которого соединен с регистрирующим блоком, блок сравнения, выход которого соединен с блоком формирования сигнала, регистрирующим блоком и блоком питания, измерительный датчик угла, статор которого неподвижен относитель но корпуса, дополнительный датчик угла, ротор которого связан со статором электродвигателя, а статор - с его валом, задающий моментный электродвигатель, статор которого жестко связан с ротором образцового датчика угла, а ротор закреплен на одном валу с ротором электродвигателя и жестко связан с ротором измерительного датчика угла, при этом выходы всех датчиков угла соединены с блоком сравнения, а второй выход блока формирования сигнала соединен со статором задающего моментного электродвигателя. Источники информации, принятые во внимание при экспертизе: 1.Авторское свидетельство СССР № 482640, кл. q 01 L 3/00, 1975. 2.Коник Б.Х. Исследование реактивных моментов в некоторых типах микромашин, Л., Судпромгиз, 1959, ivi.in, S 19, с. 37-5
IS IS
Z JJ Jt
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения вращающего момента синхронного электродвигателя | 1983 |
|
SU1139981A1 |
| Устройство для исследования бесконтактного электродвигателя постоянного тока | 1983 |
|
SU1126904A1 |
| Устройство для контроля подшипников электродвигателя | 1985 |
|
SU1276943A1 |
| Устройство для испытания редуктора привода лифта | 1976 |
|
SU616554A1 |
| Способ определения пускового момента электродвигателя | 1985 |
|
SU1328695A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЯЗКОСТИ ТЕКУЧИХ СРЕД, ДАТЧИК ВЯЗКОСТИ И СПОСОБ ИЗГОТОВЛЕНИЯ ЭЛЕКТРОДОВ ТАХОМЕТРА ДАТЧИКА ВЯЗКОСТИ | 1998 |
|
RU2152022C1 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ И ИСПЫТАНИЯ ЭЛЕКТРОПРИВОДОВ | 2012 |
|
RU2521788C2 |
| Двигательная установка подводного аппарата | 2017 |
|
RU2699178C2 |
| Устройство для испытания моментных электродвигателей | 1990 |
|
SU1780065A1 |
| Способ настройки моментного вентильного электродвигателя | 1987 |
|
SU1495944A1 |