00
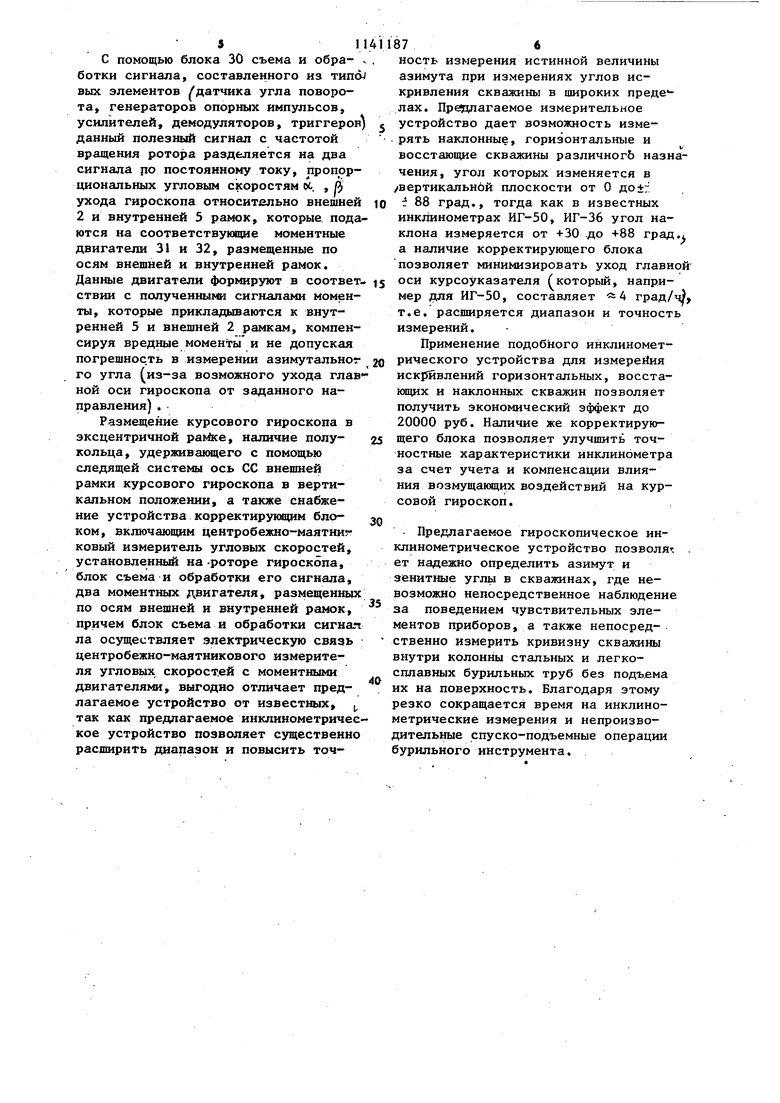
Kj 1 Изобретение относится к промысловой геофизике, а более конкретно устройствам для контроля технического состояния скважин, и может быт применено при бурении нефтяных, газовых и геологоразведочных скважи Известен гироскопический инклинометр, содержащий корпус, трехстепенной гироскоп, связанный с подвижной рамкой, в которой установ лены датчики углов, преобразователь но-измерительный блок, может быть снабжен установленным в подвижной рамке эксцентричным грузом и двумя 1ироскопическими двухстепенными датчиками угловой скорости, чувстви тельные оси которых взаимно перпендикулярны и связаны с подвижной рамкой m. Однако данный гироскопический инклинометр отличается сложностью и громоздкостью корректирующего устройства, ограничивающего возможность его использования в глубоких и узких скваяшнах-; предостаточной точностью замеров из-за остаточной статической неуравновешенности, тре ния в опорах и прочих вредных момен тов, действующих на чувствительньш элемент гироприборов; наличием суще ственных погрешностей при измерении двухстепенным гироскопом угловой скорости вращения Земли, что непосредственно влияет на точность опре деления азимута; измерением синусно косинусным трансформатором, установ ленным между трехстепенным гироскопом и раккой корректирующего устрой ства, не истинной величины азимута, а угла между плоскостью наклона и некоторым направлением (задаваемым трехстепенным гироскопом , вследств того, что ось наружной рамки трехст пенного гироскопа занимает не верти кальное положение. Наиболее близким к изобретению является устройство для измерения кривизны горизонтальных и наклонных скважин, содержащее курсовой гироскоп, состоящий из коаксйапьно расп ложенных в опорах внещней рамки и внутренней рамки, внутри которой размещен гиромотор, включающий ротор и статор, электромотор с зубчатым колесом, кинематически связан ное с последним полукольцо, установ ленное в опорах эксцентричной рамки 2. 872 Наличие следящей системы, состоя--, щей из контактного уровня, электрической и зубчатой передач, удерживающей ось наружной рамки трехстепенного гироскопа в вертикальном положении, в совокупности с другими элег ментами данного устройства обеспечивает возможность измерения истинной величины азимута при изменении углов искривления скважин в широких пределах. Недостатком известного устройства является недостаточная точность измерения азимута из-за ухода главной оси гироскопа от заданного направления, обусловленного действием вредных моментов от трения, токоподводов, статической неуравновешенности элементов и т.п. причин. Цель изобретения - повышение точности. Цель достигается тем, что устройство для измерения кривизны горизонтальных и наклонных скважин, содержащее курсовой гироскоп, состоящий из коаксиально расположенных в опорах внешней рамки и внутренней рамки, внутри которой размещен гиромоторJ включающий ротор и статор, электромотор с зубчатым коле-, сом, кинематически связанное с последним полукольцо, установленное в onopaSc эксцентричной рамки, снабжено корректирующим блоком, включающем центробежно-маятниковьш измеритель угловых скоростей, блок съема и обработки его сигнала и два моментных двигателя, при этом центробежномаятниковый измеритель угловых скоростей установлен на роторе, моментные двигатели размещены по осям внешней и внутренней рамок, а блок съема и обработки сигнала осуществляет электрическую связь центро- бежно-маятникового измерителя углог вых скоростей с моментными двигате.лями. На фит.1 изображена принципиальная кинематическая схема предлагаемого устройства; на фиг.2 - курсовой гироскоп, на роторе которого установлен центробежно-маятниковый измеритель угловых скоростей. Устройство для измерения кривизны горизонтальных и наклонных скважин содержит курсовой гироскоп 1, состоящий из внешней рамки 2, в которой на опорах 3 и 4 удерживается внутренняя рамка 5 с размещенным внутри 3 гиромотором 6 (включающим ротор, гир скопа и статор). Ось СС вращения внешней рамки 2 совмещена с опорами 7 и 8 полукольца 9, которое удер живается в опорах 10 и II эксцентри ной рамки 12. Внутри рамки 12 для смещения центра тяжести укреплены грузы 13 и 14, а сама рамка I2 удер дивается с помощью опор 15 и 16 шасси 17. Следящая система данного измерительного устройства включает контактный уровень 18, электромотор 19, зубчатое колесо 20 которого постоянно находится в зацеплении с зубчатой нагрузкой 21 колукольца 9. Электропитание инклинометра осущест ляется через контактные щетки 22 и коллектор 23 эксцентричной рамки 12. Измерительная система устройства содержит реостатные датчики аз мута 24 и наклона 25, токосъемные щетки 26 и 27, жестко связанные соответственно с полукольцом 9 и от Becofi 28. Корректирующий блок, дополнительно вводимый в измерительно устройство, включает центробежномаятниковый измеритель угловых скоростей 29, представляющий собой ине ционную массу, закрепленную на упругом подвесе, установленный на р торе гироскопа (гиромотора б) блок 30 съема и обработки его сигнала, а также моментные двигатели 31 и 32 размещенные по осям внешней и внутр ней рамок 2 и 5 курсового гироскопа 1. Все элементы электрической и кинематической схем гироскопического инклинометра смонтированы на шасси и размещены в герметизированном цилиндрическом корпусе, имеющем пер ходник для присоединения к кабелю при измерении наклонных скважин и к штангам при измерениях восстающих скважин. При измерении кривизны скважины устройство займет некоторое наклонное положение, которое характеризуется зенитнымJи азимутальным углами Эксцентричная рамка 12,устанавливается в плоскости искривления сква жины силой тяжести смещенных относительно оси грузов 13 и 14. С помо щью следящей системы, состоящей из контактного уровня 18, электромотора 19, зубчатое колесо 20 которого постоянно находится в зацеплении с зубчатой нагрузкой 21 полукольца 9, ось СС внешней рамки 2 курсового 74 гироскопа 1 удерживается в вертикальном положении. Разность потенциалов, пропорциог нальная величинам углов азимута и наклона искривления скважины, снимается с реостатных датчиков азимута 24 и наклона 25 токосъемными щетками 26 и 27, жестко связанными соответственно с полукольцом 9 и отвесом 28. Главная ось курсового трехстепенного гироскопа 1 из-за вредных моментов от трения, токоподводов, статической неуравновещенности элементов и т.п. уходит от заданного направления. Дпя устранения этого недостатка применяется корректирующий блок, который функционирует следунадим образом. При возникновении отклонения главной оси гироскопа от заданного направления угол V поворота инерционной массы центробежно-маятникового измерителя 29., вращающегося с постоянной угловой скоростью О, вместе с ротором гироскопа, содержит в себе информацию об угловых скоростяхoi , и ухода относительно двух взаимноперпендикулярных осей в плоскости перпендикулярной оси собственного вращения ротора гироскопа (фиг.2). Дифференциальное уравнение динамики инерционной массы центробежно-маятни кового измерителя угловых скоростей после линеаризации имеет вид Jl|ЬЬг cЧ - l г.(-3,Oy)sг((5;nлt bficositih, die c5f d-t 1Т Р где 1з -- коэффициент момента сил вязкого терния, действующего на инерционную массу относительно выходной оси OY ; G - коэффициент жесткости упругих элементов подвеса инерционной массы измерителя; 0(/} - углы поворотов внешней 2 и внутренней 5 рамок курсового гироскопа 1, характеризующие уход главной оси гироскопа от заданного направления под действием различного рода вредных моментов; ури,7- осевые моменты инерции инерционной массы центробежномаятникового измерителя угловых скоростей 29 относительно соответствующих осей. С помощью блока 30 съема и обработки сигнала, составленного из типо вых элементов /датчика угла поворота, генераторов опорных импульсов, усилителей, демодуляторов, триггеров данньш полезный сигнал с частотой вращения ротора разделяется на два сигнала ро постоянному току, пропорциональных угловым скоростям об, , Д ухода гироскопа относительно внешней 2 и внутренней 5 рамок, которые, пода ются на соответствующие моментные двигатели 31 и 32, размещенные по осям внешней и внутренней рамок Данные двигатели формируют в соответ ствии с полученными сигналами моменты, которые прикладываются к внутренней 5 и внешней 2 рамкам, компенсируя вредные моменты и не допуская погрешность в измерении азимутальног го угла (из-за возможного ухода глав ной оси гироскопа от заданного направления) . Размещение курсового гироскопа в эксцентричной , наличие полукольца, удерживакнцего с помощью следящей системы ось СС внешней рамки курсового гироскопа в вертикальном положении, а также снабжение устройства корректирующим блоком, включающим центробежно-маятниг ковый измеритель угловых скоростей, установленный на -роторе гироскопа, блок съема и обработки его сигнала, два моментных двигателя, размещенных по осям внешней и внутренней рамок, причем блок съема и обработки сигнал ла осуществляет электрическую связь центробежно-маятникового измерителя угловых скоростей с моментными двигателями, выгодно отличает предлагаемое устройство от известных, так как предлагаемое инклинометричес кое устройство позволяет существенно расширить диапазон и повысить точность измерения истинной величины азимута при измерениях углов искривления скважины в широких пределах. Предлагаемое измерительное устройство дает возможность измерять наклонные, горизонтальные и восстающие скважины различногЬ назначения, угол которых изменяется в вертикальной плоскости от О до ±7 f 88 град,, тогда как в известных инклинометрах ИГ-50, ИГ-36 угол наклона измеряется от +30 .до +88 град. а наличие корректирующего блока позволяет минимизировать уход главной ° курсоуказателя который, например для ИГ-50, составляет 4 град/ч, т.е. расширяется диапазон и точность измерений. Применение подобного инклинометрического устройства для измерейия искривлений горизонтальных, восстанлцих и наклонных скважин позволяет получить экономический эффект до 20000 руб. Наличие же корректирующего блока позволяет улучшить точностные характеристики инклинометра за счет учета и компенсации влияния возмущающих воздействий на курсовой гироскоп. Предлагаемое гироскопическое инклинометрическое устройство позволяп , ет надежно определить азимут и зенитные угль в скважинах, где невозможно непосредственное наблюдение за поведением чувствительных элементов приборов, а также непосредственно измерить кривизну скважины внутри колонны стальных и легкосплавных бурильных труб без подъвма их на поверхность. Благодаря этому резко сокращается время на инклиноетрические измерения и непроизвоительные спуско-подъемные операции бурильного инструмента.
Фиг.1
Pui.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Гироскопический инклинометр | 1980 |
|
SU901485A1 |
| Инклинометр | 1990 |
|
SU1788224A1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| Гироскопический инклинометр | 1981 |
|
SU1002551A1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1970 |
|
SU282223A1 |
| ГИРОСКОПИЧЕСКИЙ ДАТЧИК ИНКЛИНОМЕТРА | 1995 |
|
RU2126525C1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1995 |
|
RU2095563C1 |
| Устройство для измерения кривизны горизонтальных и наклонных скважин | 1977 |
|
SU705103A1 |
| Гироскопический инклинометр | 1988 |
|
SU1548423A1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2528105C2 |

УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КРИВИЗНЫ ГОРИЗОНТАЛЬНЫХ И НАКЛОННЫХ СКВАЖИН, содержащее курсовой гироскоп, состоящий из коаксиально расположенных в опорах внещней рамки и внутренней рамки, внутри которой размещен гиромотор, включающий ротор и статор, электромотор с зубчатым колесом, кинематически связанное с последним полукольцо, установленное в опорах эксцентричной рамки, отличающееся тем, что, с целью повышения точности, оно снабжено корректирующим блоком, включающим центробежно-маятниковый измеритель угловых скоростей, блок съема и обработки его сигнала и два моментных двигателя, при этом центробежно-маятниковый измеритель угловых скоростей установлен на роторе, моментные двигатели размещены по осям внешней и внутренней рамок, а блок съема и обработки сигнала осуществляет электрическую (/) связь центробежно-маятникового измерителя угловых скоростей с моментными двигателями.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Гироскопический инклинометр | 1980 |
|
SU901485A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для измерения кривизны горизонтальных и наклонных скважин | 1977 |
|
SU705103A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
