4
СО
сд
о
vj
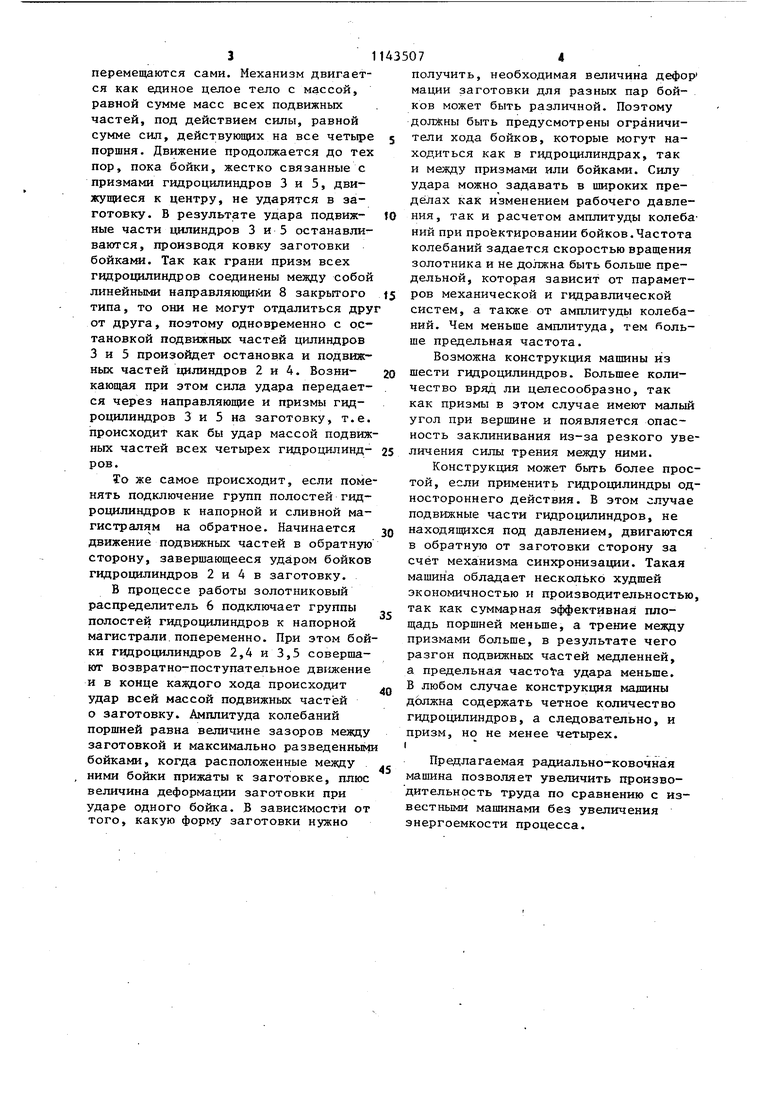
Изобретение относится к кузнечнопрессовому оборудоэанию, а именно к конструкциям радиально-ковочных машин (РКМ). Известна радиально-ковочная ма,шина, содержащая четное количество радиально расположенных бойков с при водом в виде гидрО1р{линдров, соедин нных между собой через золотниковый распределитель, а также механизм синхронизации перемещения бойков 1j. Недостатком известной РМК является то, что бойки после удара о заготовку нужно развести в стороны, для чего необходимо их сначала разогнать а затем затормозить, на что тратится вхолостую энергия и время. При этом время обратного хода больще, .чем вре мя прямого хода. Kpojkie того, механизм синхронизадии не обеспечивает полной синхронизации движения бойков вследствие возможной нендантичности выполнения или работы гидроцилиндров и золотников. Целью изобретения является повышение производительности и снижение энергозатрат. Указанная цель достигается тем, что в радиально-ковочной машине, содержащей четное количество радиально расположенных бойков с приводом в виде гидроцилиндров, соединенных меж ду собой через золотниковый распределитель, а также механизм синхро низации перемещения бойков, последний выполнен в виде сопряженных меж ду собой по клиновым поверхностям призм в количестве, соответствующем числу гг-щроцилиндров, каждая из кото рых жестко соединена с подвижными частями соответствующего гидроцилинд ра, боковые грани сопряженных призм соединены между собой с помощью линейных направляю дах закрытого типа с возможностью относительного переме щения. На фиг. 1 изображена принципиальная схема радиально-ковочной машины; на фиг. 2 - сечение А-А на фиг. 1. Радиально-ковочная машина содержит четное количество радиально расположенных бойков 1 с приводом в ви5, соединенных де гидроцилиндров 2 между собой через золотниковый распределитель 6, а также механизм синхронизации перемещения бойков 1, выполненный в виде сопряженных между собой по клиновым поверхностям призм 07J 7 в количестве, соответствующем числу гидроцилиндррв (в данном случае четыре), каждая из которых жестко соединена с подвижными частями соответствующего гидроцилиндра, при этом боковые грани сопряженных между собой призм 7 соединены между собой с помощью линейных направляющих 8 закрытого типа с возможностью относительного перемещения, а гидроцилиндры разделены на две группы с равным количеством цилиндров (в данном случае 2, 4 и 3, 5), связанных между собой напорной 9 и сливной 10 магистралями. Кроме этого, рабочие полости и полости обратного хода гидроцилиндров одной группы соединены соответственно с полостями обратного хода и рабочими полостями гидроцилиндров Другой группы. Подвижными частями гидроцилиндров, к KOTOpbtM жестко прикрепляются 7 с бойками 1, могут являться штоки 11 гидроцилиндров или корпуса 12 гидроцилиндров, в последнем случае штоки 11 жестко закреплены на станине (не показана). Устройство работает следующим образом. Золотниковый распределитель 6 соединяет рабочие .полости гидроцилиндров 3 и 5 и полости обратного хода гидроцилиндров 2 и 4 с напорной магистралью 9, а рабочие полости гидроцилиндров 2 и 4 и полости обратного хода гидроцилиндров 3 и 4 - со сливной магистралью tO. При этом жидкость из напорной магистрали поступает в подключенные к ней полости, в результате чего происходит равноускоренное движение поршней гидроцилиндров 3 и 5 к центру устройства, а поршней гидроцилиндров 2 и 4 от центра, совместно с установленными на штоках 11 призмами 7. На поршни четньк гидроцилиндров действует меньшая сила, чем на поршни нечетных гвдроцилиндров, так ка.к площади поршней со стороны штока меньше, чем с противоположной стороны, в связи с чем они двигались бы с меньшим ускорением, чем поршни гидроцилиндров 3 и 5, если бы не было синхронизирующего механизма из призм 7. Призмы, установленные на штоках гидроцилиндров 3 и 5, выталкивают призмы, установленные на штоках гидроцилиндров 2 и 4, с той же скоростью, с какой перемещаются сами. Механизм двигается как единое целое тело с массой, равной сумме масс всех подвижных частей, под действием силы, равной сумме сил, действующих на все четыре поршня. Движение продолжается до тех пор, пока бойки, жестко связанные с призмами гидроцилиндров 3 и 5, движущиеся к центру, не ударятся в заготовку. В результате удара подвижные части цилиндров 3 и 5 останавливаются, производя ковку заготовки бойками. Так как грани призм всех гидроцилиндров соединены между собой линейными направляющими 8 закрытого типа, то они не могут отдалиться дру от друга, поэтому одновременно с ос тановкой подвижных частей цилиндров 3 и 5 произойдет остановка и подвижных частей цилиндров 2 и 4. Возникающая при этом сила удара передается через направляющие и призмы гидроцилиндров 3 и 5 на заготовку, т.е. происходит как бы удар массой подвиж ных частей всех четырех гидроцилиндров. То же самое происходит, если поме нять подключение групп полостей гидроцилиндров к напорной и сливной магистралям на обратное. Начинается движение подвижных частей в обратную сторону, завершающееся ударом бойков гидроцилиндров 2 и 4 в заготовку. В процессе работы золотниковый распределитель 6 подключает группы полостей гидрощшиндров к напорной магистрали.попеременно. При этом бой ки гидроцилиндров 2,4 и 3,5 совершают возвратно-поступательное движение и в конце каждого хода происходит удар всей массой подвижных частей о заготовку. Амплитуда колебаний поршней равна величине зазоров между заготовкой и максимально разведенным бойками, когда расположенные между ними бойки прижаты к заготовке, плюс величина деформации заготовки при ударе одного бойка. В зависимости от того, какую форму заготовки нужно получить, необходимая величина дефор мации заготовки для разных пар бойков может быть различной. Поэтому должны быть предусмотрены ограничители хода бойков, которые могут находиться как в гидроцилиндрах, так и между призмами или бойками. Силу удара можно задавать в широких пределах как изменением рабочего давления, так и расчетом амплитуды колебаний при проектировании бойков.Частота колебаний задается скоростью вращения золотника и не должна быть больше предельной, которая зависит от параметров механической и гидравлической систем, а также от амплитуды колебаний. Чем меньше амплитуда, тем больше предельная частота. Возможна конструкция машины из шести гидро1щлиндров. Большее количество вряд ли целесообразно, так как призмы в этом случае имеют малый угол при вершине и появляется опасность заклинивания из-за резкого увеличения силы трения между ними. Конструкция может быть более простой, если применить гидроцилиндры одностороннего действия. В этом случае подвижные части гидроцилиндров, не находящихся под давлением, двигаются в обратную от заготовки сторону за счёт механизма синхронизации. Такая машинка обладает несколько худшей экономичностью и производительностью, так как суммарная эффективная площадь поршней меньше, а трение между призмами больше, в результате чего разгон подвижных частей медленней, а предельна я частота удара меньше. В любом случае конструкция машины должна содержать четное количество гидроцилиндров, а следовательно, и призм, но не менее четьфех. I Предлагаемая радиально-ковочная машина позволяет увеличить производительность труда по сравнению с известными машинами без увеличения энергоемкости процесса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Радиально-ковочная машина | 1976 |
|
SU692664A1 |
| Радиально-ковочная машина | 1983 |
|
SU1186343A1 |
| ГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО УДАРНОГО ДЕЙСТВИЯ | 1993 |
|
RU2027937C1 |
| Судовая рулевая машина | 1979 |
|
SU839861A1 |
| ГИДРАВЛИЧЕСКИЙ УДАРНЫЙ МЕХАНИЗМ | 1993 |
|
RU2066754C1 |
| Гидравлическая тормозная система транспортного средства | 1981 |
|
SU998176A2 |
| Устройство для разрушения мерзлых грунтов | 1981 |
|
SU981523A1 |
| СПОСОБ УПРАВЛЕНИЯ ПУЛЬСАТОРНЫМ ГИДРОПРИВОДОМ РАДИАЛЬНО-КОВОЧНОЙ МАШИНЫ И РАДИАЛЬНО-КОВОЧНАЯ МАШИНА | 2002 |
|
RU2230622C1 |
| Устройство для натяжения гусеницы транспортного средства | 1981 |
|
SU982958A1 |
| Гидравлическая тормозная система транспортного средства | 1979 |
|
SU919916A1 |
РАДИАПЬНО-КОВОЧНАЯ МАЛИНА, содержащая четное количество радиально расположенных бойков с приводом в виде гидроцилиндров, соединенных между собой через золотниковый распределитель, а также механизм синхронизации перемещения бойков, отличающаяся тем, что, с целью повышения производительности и снижения энергозатрат, механизм синхронизации перемещения бойков выполнен в виде сопряженных между собой по клиновым поверхностям призм в количестве, соответствующем числу гидроцилиндров, каждая из которых жестко соединена с подвижньада частями соответствующего гвдроцнлиндра, боковые грани сопряженньк призм соединены между собой при помощи линейных направляющих закрытого типа с возможностью относительного перемещения.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Радиально-ковочная машина | 1975 |
|
SU562367A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| (прототип) | |||
| « | |||
