Устройства для подачи заготовок из магазина в патрон шпинделя токарного, шлифовального и т. п. станков, в которых использована «механическая рука (рычаг) , совершаюш.ая качательные движения в направлении, перпендикулярном оси шпинделя, известны.
Особенностьюпредлагаемого
устройства является снабжение «механической руки на ее рабочем конце толкателем с нятой, передвижной вдоль оси патрона шпинделя под воздействием углового рычага, для переключения направления движения которого служат неподвижные упоры, установленные на концевых участках пути «механической руки. Такое выполнение предлагаемого устройства обеспечивает заталкивание заготовки, доставленной из магазина «механической рукой, в патрон шпинделя.
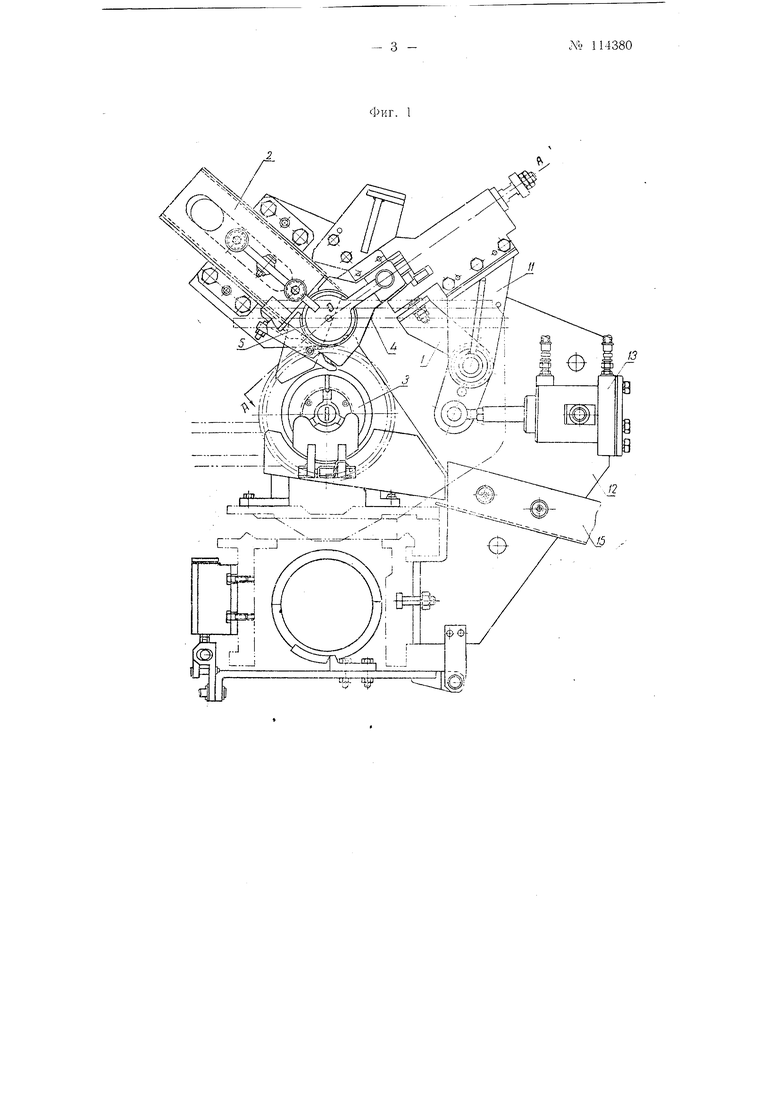
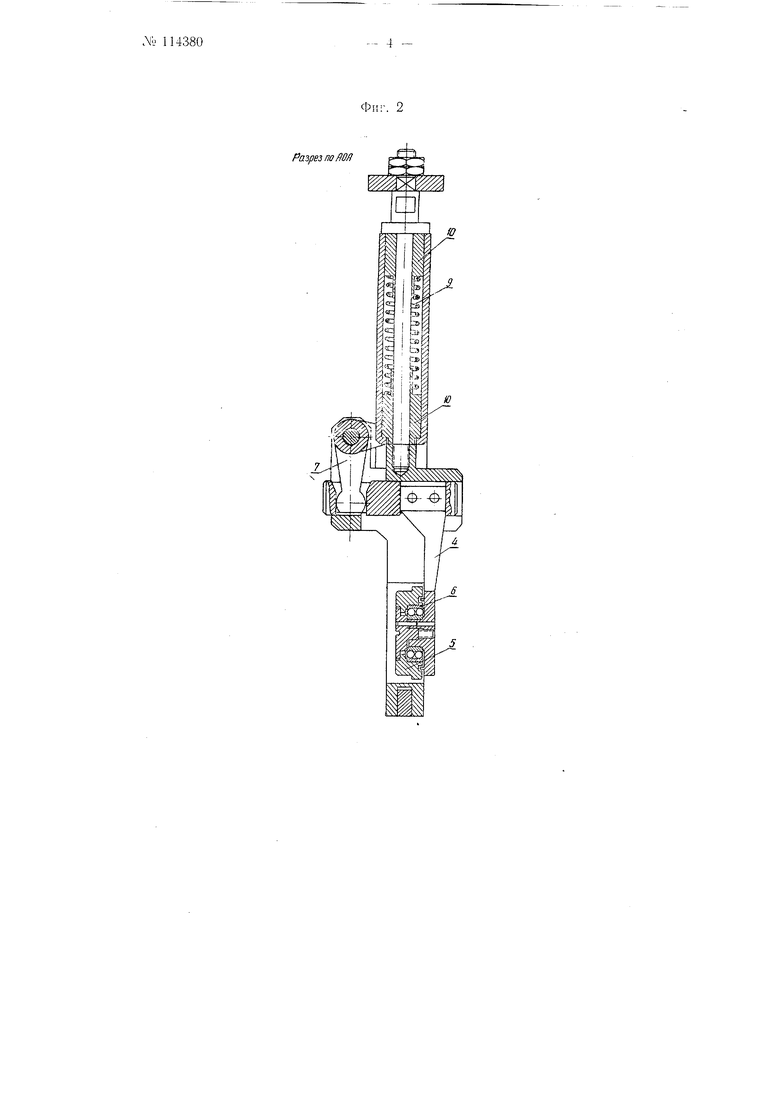
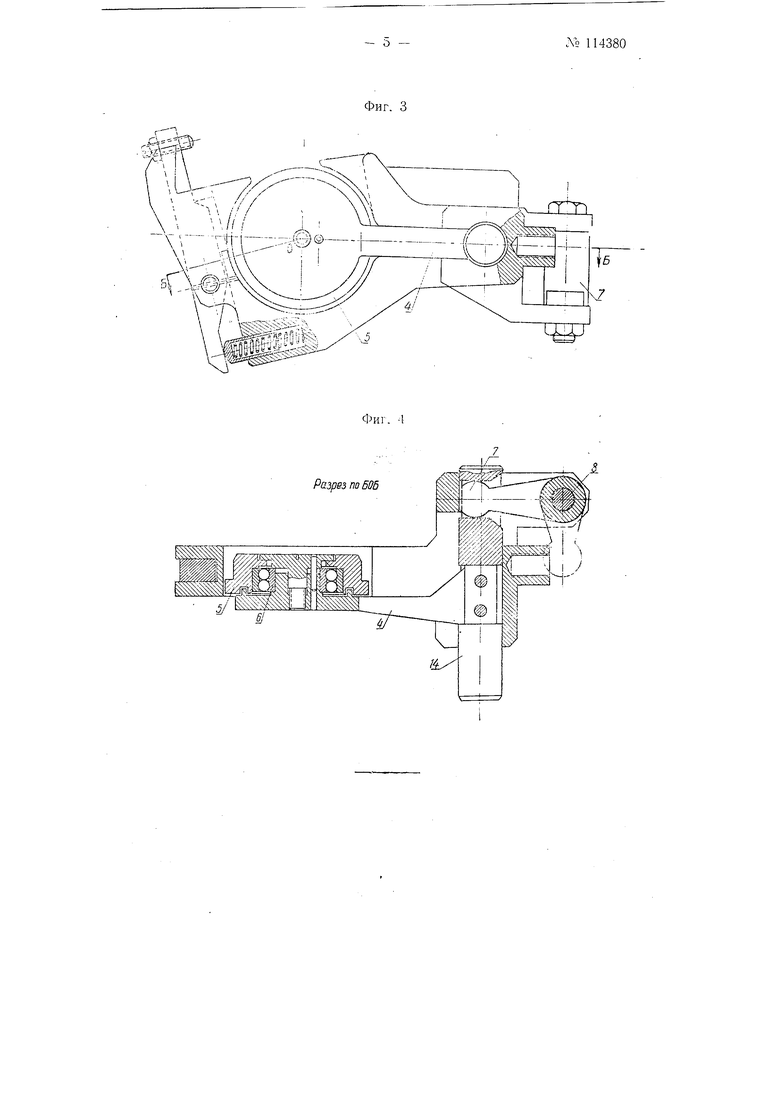
На фиг. 1 устройство схематически показано в общем виде; на фиг. 2-разрез по АО А на фиг. 1; на фиг. 3 показан толкатель
устройства; на фиг. 4-разрез по БОБ на фиг. 3.
«Механическая рука /, совершая качательные движения в направлении, перпендикулярном оси шпинделя станка, принимает за-, готовку из магазина 2 и переносит ее к натрону 3 шпинделя станка. После доставки к натрону 5 заготовки последняя заталкивается в патрон. Для этого «механическая рука 1 на конце снабжена толкателем 4 с пятой 5, вращаюпгейся на радиальном сферическом шарикоподшипнике 6. Двунлечий рычаг 7, поворачиваясь вокруг оси 8, сообшает толкате :no 4 с нятой 5 движения вдоль оси патрона. Для возврата толкателя 4 из крайних положений в среднее пружина 9, занертая с обеих сторон подвижными втулками 10, управление неремешением которых осушествляется с полюнгью скалки и водилом // при контакте с неподвижными упорами, установленными на концевых участках нути «механической руки. Один из этих упоров
находится на магазине 2, а другой упор укреплен на несущем кронштейне 12. Водило 11 укреплено на оси несущего кронштейна 12 и совершает вокруг нее вместе с «механической рукой / качательные движения под воздействием штока поршня иневматического привода 13.
Предлагаемое устройство преднааначено для обслуживания главным образом одношпиндельных станков и,следовательно, единственный шпиндель станка является и рабочей и загрузочной позицией. Так как зона перед патроном занята суппортами, нодача заготовок из магазина производится «механической рукой не вдоль оси патрона, а перпендикулярно ей, и затем только толкатель 4 подает заготовку в патрон 3 вдоль оси шпинделя. Эти два движения осуществляются одним качатсльным движением механической руки от одного пневматического привода 13, благодаря пруЖИне , срабатывающей в двух направлениях. Ход поршня HHeBMaTHMefi-Koго привода рассчитан таким образом, что когда головка «механической руки останавливается На любом из двух упоров, поршень продолжает двигаться, сообпхая посредством водила 11 и скалки одной из втЗлок 9 перемещения, благодаря чему двуплечий рычаг 7 передвигает скалку 14 толкателя 4 вправо или влево, в зависимости от того, какой из упоров действует.
В период обработки заготовки на станке «механическая рука / поднята вверх к магазину 2. По окончании обработки суппорт отходит, патрон 3 разжимается, вь брасыватели удаляют готовое изделие в отводящий желоб 15, «механическая рука / с заготовкой, захваченной из магазина, опускается вниз к патрону 3 заготовка толкателем 4 и пятой 5 заталкивается в патрон. Пята 5, благода ул шйрикополшипнику б, вращается на толкателе 4, что дает воз-дюжность заталкивать заготовку в патрон 3 без прекращения ei-Q вращения.
Предмет изобретения
1.Устройство для подачи заготовок из магазина в патрон шпинделя токарного, шлифовального и т. п. станков с использованием «механической руки, совершаюшсй качательные движения в нап ;авлении, иерпендикулярно.м oc;i п1Г;Кнделя, отличающееся тем, ТО. с целью заталкивания в патрон шпинделя доставленной «механической рукой из бункера заготовки, «механическая рука на рабочем конце снабжена толкателе.м с пятой, передвижной вдоль оси патрона шпинделя под воздействием углового рычага, для переключения направления движения которого служа неподвижные упоры, установлен1 ые на концевых участках пути «механической руки.
2.Форма выполнения устройства по п. 1, отличающаяся тем, что. с целью последовательного осуществления движений- «механической руки перпендикулярно оси патрона шпинделя и двИ жений толкателя параллельно этой оси, от одного пневматического привода, в корпусе «механической руки установлена спиральная нружина, сжимающаяся попеременно в обоих направлениях ,ачания «механической руки под возлеГствием подвижных втулок, ЛЯ управления перемещением которых служит скалка, связанная с угловым рычагом.
3.Форма выполнения устройства по пп. 1 и 2, отличающаяся тем, что, с целью возможности заталкивания заготовки в патрон без прекращения его вращения, пята толкателя монтирована в подшипнике качения.
Фиг. I
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи заготовок из магазина в патрон шпинделя токарного, шлифовального и т.п. станков | 1956 |
|
SU114614A2 |
| Загрузочное устройство для многошпиндельных токарных станков с двойной индексацией | 1961 |
|
SU147435A1 |
| Автомат для фрезерования секториальных канавок в несколько проходов | 1929 |
|
SU16976A1 |
| Загрузочное устройство | 1983 |
|
SU1144846A2 |
| Загрузочное устройство | 1972 |
|
SU443740A1 |
| Устройство для загрузки токарных станков | 1985 |
|
SU1303366A1 |
| МЕТАЛЛООБРАБАТЫВАЮЩИЙ СТАНОК (ВАРИАНТЫ) | 2006 |
|
RU2401721C2 |
| Устройство для комплектования пакета дисковых заготовок с технологическими прокладками и загрузки его в зону обработки | 1973 |
|
SU519314A1 |
| ПОЛУАВТОМАТ ДЛЯ ПОДРЕЗКИ БАЗОВЫХ ТОРЦОВ ЗАГОТОВОК ЗУБЧАТЫХ КОЛЕС | 1966 |
|
SU224987A1 |
| Загрузочное устройство | 1985 |
|
SU1298038A1 |
13
Разрез т ЙОД
Фиг. 2
3
