поворота дополнительная механическая рука 13 касается другого упора, а ось заготовки совпадает с осью захвата, механической руки. Включается привод, механическая рука перемещается вдоль оси шпинделя к патрону, при этом захват залсимает заготовку.
1
Изобретение относится к машино- строе1шю и может быть использовано в различных областях промышленности, связанных с обработкой заготовок типа стержней с головками на токарных горизонтальных многошпиндельных станках для перемещения, установки в положение обработки и съема заготовок, которые не могут перемещаться по лоткам-скатам из-за дефектов заготово;К, к которым можно отнести заусенцы, неровные торцы, другие элементы, котор«ле могут вызвать перекос и заклинивание заготовки при качении по лотку.
Целью изобретения является повышение надежности и производительности работы.
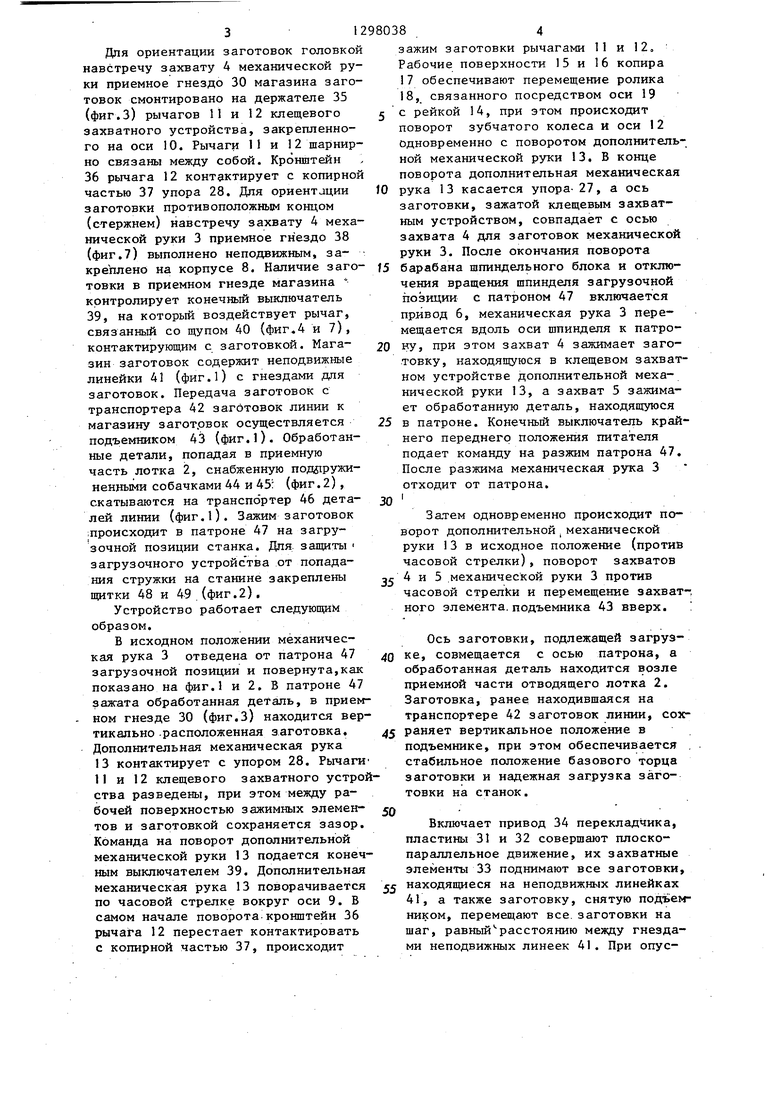
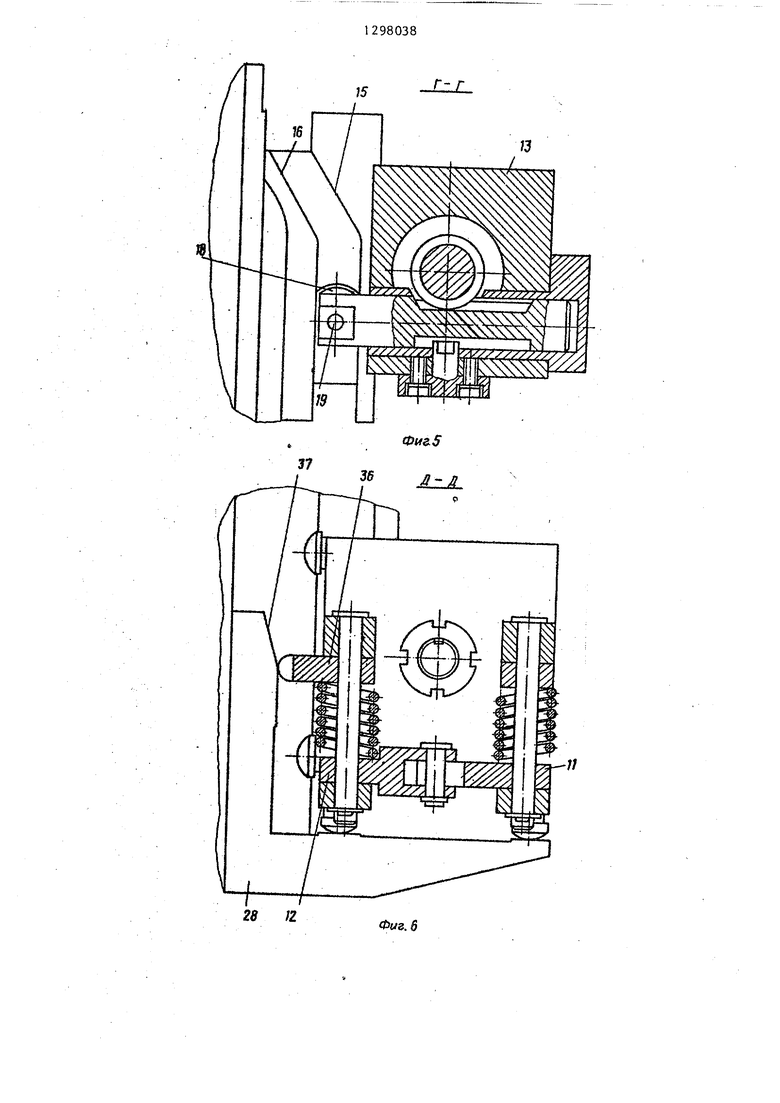
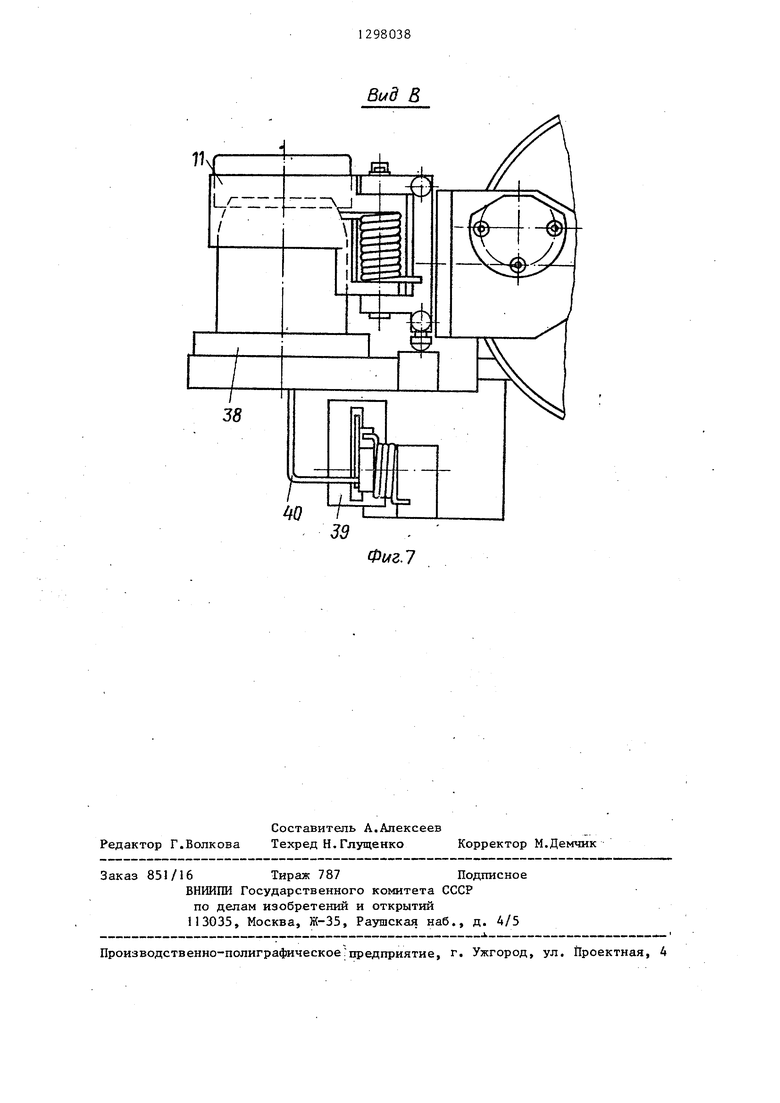
На фиг. показано загрузочное устройство со станком, общий вид; на фиг.2 - вид. А на фиг.1; на фиг.З разрез Б-Б на фиг.2 на фиг,4 - вид В на фиг.3 (вариант ориентации заготовки навстречу захвату питателя); на фиг.5 - разрез Г-Г на фиг.4; на фиг.6 - разрез Д-Д на фнг.4; на фиг.7 - вид В на фиг.З (вариант ориентации заготовки противоположным концом).
Загрузочное устройство содержит смонтированные на станине станка магазин 1 для заготовок (фиг„1), лоток 2 дпя обработанных деталей, механическую руку 3 с захватом 4 для заготовок, захватом 5 дпя обработанных деталей (фиг.2), привод 6 осевого перемещения (фиг.1), привод 7 поворота захватов к шпинделю загрузочной позиции станка. На станине станка установлен к&рпус 8 (фиг.2 и З) устройства дпя поворота дополнительного клещевого захватного устройства вокруг двух взаимно перпендикулярных осей 9 и 10. Клещевое захватное
298038
находящуюся в клещевом захватном устройстве дополнительной механической руки 13, а другой захват зажимает обработанную деталь, находящуюся в патроне. После разжима патрона механич еская рука отходит от патрона. 7 ил.
устройство состоит из подпружиненных рычагов 11 и 12. Дополнительная механическая рука 13 снабжена подвижной рейкой 4, которая перемещается
параллельно оси 9. Рейка 14 взаимодействует с рабочими поверхностями 15 и 6 копира 17 посредством ролика 18, установленного на оси 19, жестко связанной с рейкой Г4. Копир
17 крепится к корпусу 8, закрепленному на ста1шне. Рейка 1А находится в зацеплении с зубчатым колесом 20, жестко связанным с осью-10, смонтированной на подшипниках 21 и 22,
внутри дополнительной механической руки 13. На дополнительной механической руке закреплена чашка 23, охватывающая копир 57. Ось 9 смонтирована на подшипниках 24 и 25 и посредством зубчатого колеса 26 кинематически связана с гидроцилиндром поворота (не показан) дополрштельной механической руки 13. На корпусе 8 закреплены упоры 27 (фиг.2) и 28
(фиг.6),ограничивающие поворот дополнительной механической руки 13. Ось захватного устройства при зажиме заготовки 29 (фиг.2 и 3) в одном положении, показанном на фиг.2 щтрихпунктирной линией, при контакте с упором 27 совпадает с осью 4 захвата механической руки 3, в другом крайнем положении при контакте с упором 2С - совпадает с осью приемного гнезда 30 (фиг. 2 и 4) магазина заготовок. Магазин выполнен в виде перекладчика, содержащего пластины 31 и 32 (фиг.З), снабженные злементами 33(фиг.О для захвата и транспортировки заготовок в вертикальном положении. Магазин заготовок расположен за пределами рабочей зоны станка. Боз- врАтно-поступательное движение элементов 33 осуществляет привод 34 (, фиг. 1 ) .
Для ориентации заготовок головкой навстречу захвату 4 механической руки приемное гнездо 30 магазина заготовок смонтировано на держателе 35 (фиг.З) рычагов 11 и 12 клещевого захватного устройства, закрепленного на оси 10. Рычаги II и 12 шарнир- но связаны между собой. Кронштейн 36 рычага 12 контактирует с копирной частью 37 упора 28. Для ориентации заготовки противоположным концом (стержнем) навстречу захвату 4 механической руки 3 приемное гн ездо 38 (фиг.7) выполнено неподвижным, закреплено на корпусе 8. Наличие заготовки в приемном гнезде магазина контролирует конечный выключатель 39, на который воздействует рычаг, связанньй со щупом 40 (фиг.4 и 7), контактирующим с заготовкой. Магазин заготовок содержит неподвижные линейки 41 (фиг.1) с гнездами для заготовок. Передача заготовок с транспортера 42 заготовок линии к магазину заготрвок осуществляется подъемником 43 (фиг.1). Обработанные детали, попадая в приемную часть лотка 2, снабженную под тружи- ненными собачками 44 и 45 (фиг.2) , скатываются на транспортер 46 деталей линии (фиг.1). Зажим заготовок ;происходит В патроне 47 на загрузочной позиции станка. Для защиты загрузочного устройс тва от попадания стружки на станине закреплены щитки 48 и 49.(фиг.2),
Устройство работает следующим образом.
В исходном положении механическая рука 3 отведена от патрона 47 загрузочной позиции и повернута,как показано на фиг.1 и 2. В патроне 47 зажата обработанная деталь, в приемном гнезде 30 (фиг.З) находится вертикально расположенная заготовка. Дополнительная механическая рука 13 контактирует с упором 28. Рычаги 11 и 12 клещевого захватного устроства разведены, при этом между рабочей поверхностью зажимных элементов и заготовкой сохраняется зазор. Команда на поворот дополнительной механической руки 13 подается конечным выключателем 39. Дополнительная механическая рука 13 поворачивается по часовой стрелке вокруг оси 9. В самом начале поворота-кронштейн 36 рычага 12 перестает контактировать с копирной частью 37, происходит
зажим заготовки рычагами 11 и 12, Рабочие поверхности 15 и 16 копира 17 обеспечивают перемещение ролика 18, связанного посредством оси 19
с рейкой 14, при этом происходит поворот зубчатого колеса и оси 12 одновременно с поворотом дополнительной механической руки 13. В конце поворота дополнительная механическая
рука 13 касается упора- 27, а ось заготовки, зажатой клещевым захватным устройством, совпадает с осью захвата 4 для заготовок механической руки 3. После окончания поворота
5 барабана шпиндельного блока и отключения вращения шпинделя загрузочной позиции с патроном 47 включается привод 6, механическая рука 3 перемещается вдоль оси шпинделя к патро0 ну, при этом захват 4 зажимает заготовку, находящуюся в клещевом захватном устройстве дополнительной механической руки 13, а захват 5 зажимает обработанную деталь, находящуюся
5 в патроне. Конечный выключатель крайнего переднего положения питателя подает команду на разжим патрона 47. После разжима механическая рука 3
отходит от патрона.
I
Затем одновременно происходит поворот дополнительной , механической руки 13 в исходное положение (против часовой стрелки), поворот захватов 4 и 5 .механической руки 3 против часовой стрелки и перемещение захват-, ного элемента, подъемника 43 вверх. .
Ось заготовки, подлежащей загрузке, совмещается с осью патрона, а обработанная деталь находится возле приемной части отводящего лотка 2. Заготовка, ранее находившаяся на транспортере 42 заготовок линии, сох- 5 раняет вертикальное положение в
подъемнике, при этом обеспечивается стабильное положение базового торца заготовки и надежная загрузка заготовки на станок.
Включает привод 34 перекладчика, пластины 31 и 32 совершают плоскопараллельное движение, их захватные элементы 33 поднимают все заготовки, находящиеся на неподвижных линейках 41, а также заготовку, снятую подъемником, перемещают все. заготовки на шаг, равный рас стоянию между гнездами неподвижных линеек 41. При опус0
5
0
0
кании пластин 31 и 32 заготовки остаются на неподвижных линейках 41, а крайняя правая заготовка Сфиг.1) попадает в приемное гнездо 30, сохраняя при этом вертикальное положе- ние оси, головка заготовки расположена над приемным гнездом. Привод 34 перекладчика отключается, подъемник опускается в исходное положение. На загрузочной позиции стан ка в это время механическая рука 3 с захватами 4 и 5 перемещается влево (фиг.1). Заготовка попадает в патрон 47, а обработанная деталь, преодолевая сопротивление подпружиненных со- бачек 44 и 45, попадает в лоток 2. После зажима патрона 47 механическая рука 3 отходит вправо, обработанная деталь скатывается по лотку 2 и попадает на транспортер 46 деталей ли- НИИ. Включается привод 7 поворота механической руки 3, захваты после поворота по часовой стрелке возвращаются в исходное положение. На рабочих позициях станка происходит обра- ботка заготовок. На фиг.7 показан вариант конструкции загруз очного устройства, если на станке при обработке требуется зажимать заготовку за головку. В этом случае при пово- роте рычага 13 поворот клещевого захватного устройства с заготовкой происходит в. противоположном направлении.
Формула изобретения Загрузочное устройство преимущественно для токарных горизонтальных многошпиндельных станков, содержащее смонтированные на станине станка магазин дпя заготовок, приемный лоток для обработанных деталей и механическую руку с приводом ее перемещения, отличающееся тем, что, с целью повьшения надежности работы и производительности, оно снабжено дополнительной механической рукой с клещевым захватным устройством, причем дополнительная механическая рука установлена на станине с возможностью поворота от дополнительного введенного привода, а корпус захватного устройства размещен на дополнительной механической руке с возможностью поворота вокруг оси, параллельной оси поворота дополнительной механической руки, посредством зубчато-реечной передачи, зубчатое колесо которой закреплено на корпусе захватного устройства, а зубчатая рейка размещена в дополнительной руке с возможностью линейного перемещения от копира, жестко закрепленного на станине, кроме того, один из зажимньы элементов клещевого захватного устройства снабжен кронштейном, предназначенным дпя взаимодействия с дополнительно введенным упором, закрепленным на станине.
J3
Фиг.}
Вид А
39
Фиг,
г,-г
Л//// / / / // ////
w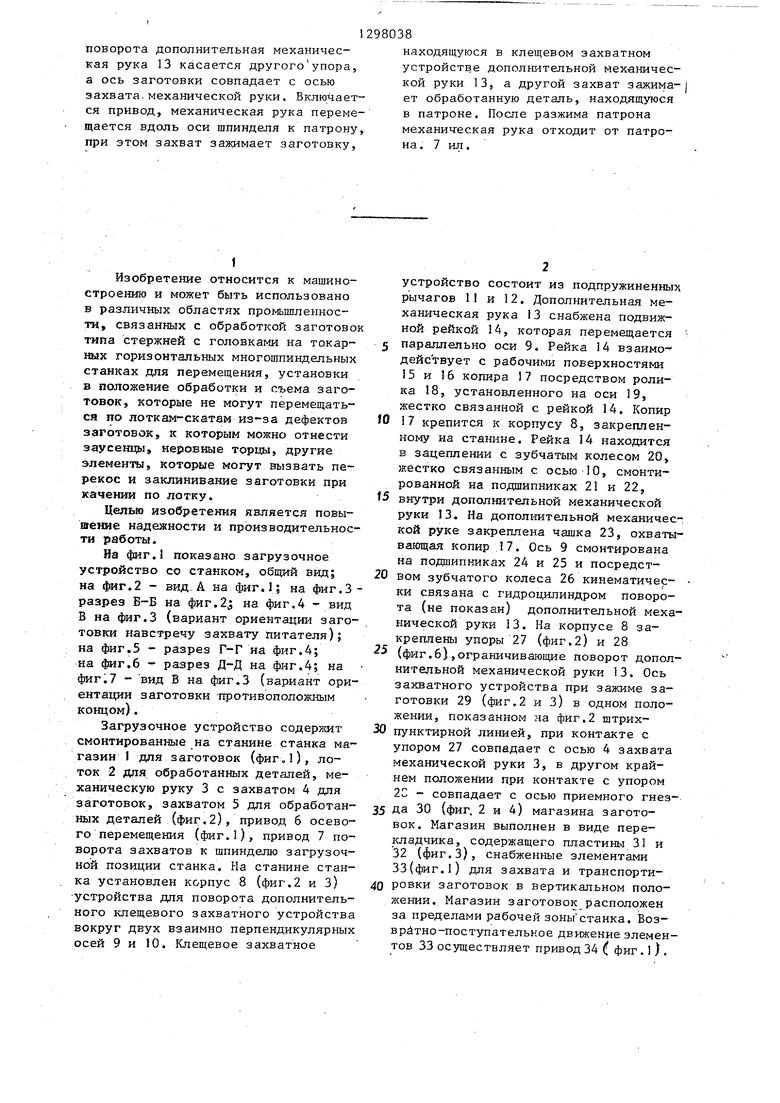
| название | год | авторы | номер документа |
|---|---|---|---|
| Питатель токарного многошпиндельного станка | 1985 |
|
SU1323331A1 |
| Автоматическая линия | 1975 |
|
SU663547A1 |
| Токарный станок для одновременной обработки концов труб и валов | 1990 |
|
SU1798038A1 |
| МЕТАЛЛООБРАБАТЫВАЮЩИЙ СТАНОК (ВАРИАНТЫ) | 2006 |
|
RU2401721C2 |
| Устройство для загрузки заготовок в патрон металлорежущего станка | 1987 |
|
SU1505749A1 |
| МАНИПУЛЯТОР | 2002 |
|
RU2228259C2 |
| Роботизированный технологический комплекс | 1987 |
|
SU1465264A1 |
| Устройство для загрузки металлорежущего станка | 1986 |
|
SU1360967A1 |
| Гибкий производственный модуль для листовой штамповки | 1988 |
|
SU1667994A1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
Изобретение относится к области машиностроения и может быть использовано в различных областях промышленности. Целью изобретения является повышение надежности и произво.дительности работы. В исходном положении механическая рука отведена от патрона загрузочной позиции. В патро31 29 и 15 21 Q 20 1022 9 3 Фиг.З не зажата обработанная деталь, в приемном гнезде 30 - заготовка. Дополнительная механическая рука 13 контактирует с одним из упоров. Рычаги 11 и 12 клещевого захватного устройства разведены, при этом между этими рычагами и заготовкой сохраняется зазор. Дополнительная механическая рука 13 поворачивается вокруг оси 9. Кронштейн 36 рычага 12 освобождается и происходит зажим заготовки. Рабочие поверхности копира вызьл- вают перемещение ролика 18 с рейкой 14. При этом происходит поворот зубчатого колеса с корпусом захватного устройства клещевого типа. В конце 6-5 (Л ND ;D Схэо САЗ 00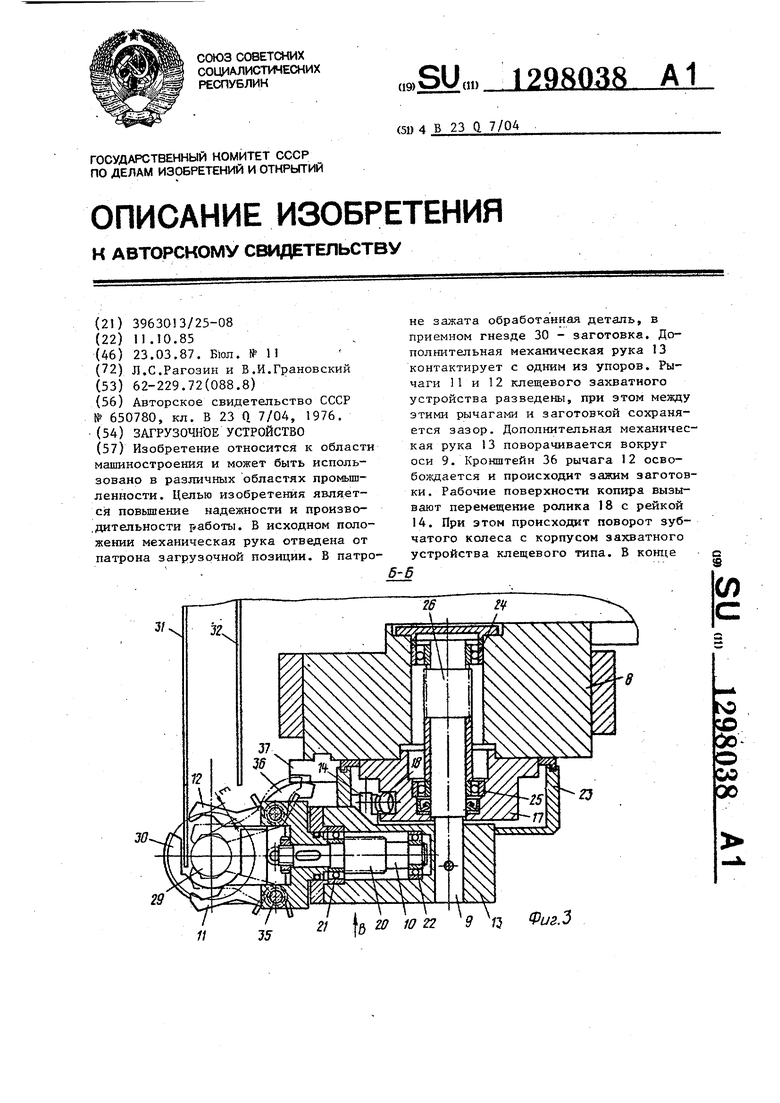
11
28 /2
Фиг. 8
В(д В
Составитель А.Алексеев Редактор Г.Волкова Техред Н.Глущенко Корректор М.Демчик
Заказ 851/16 Тираж 787Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое:предприятие, г. Ужгород, ул. Проектная, 4
Фиг.7
| Автооператор | 1976 |
|
SU650780A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
