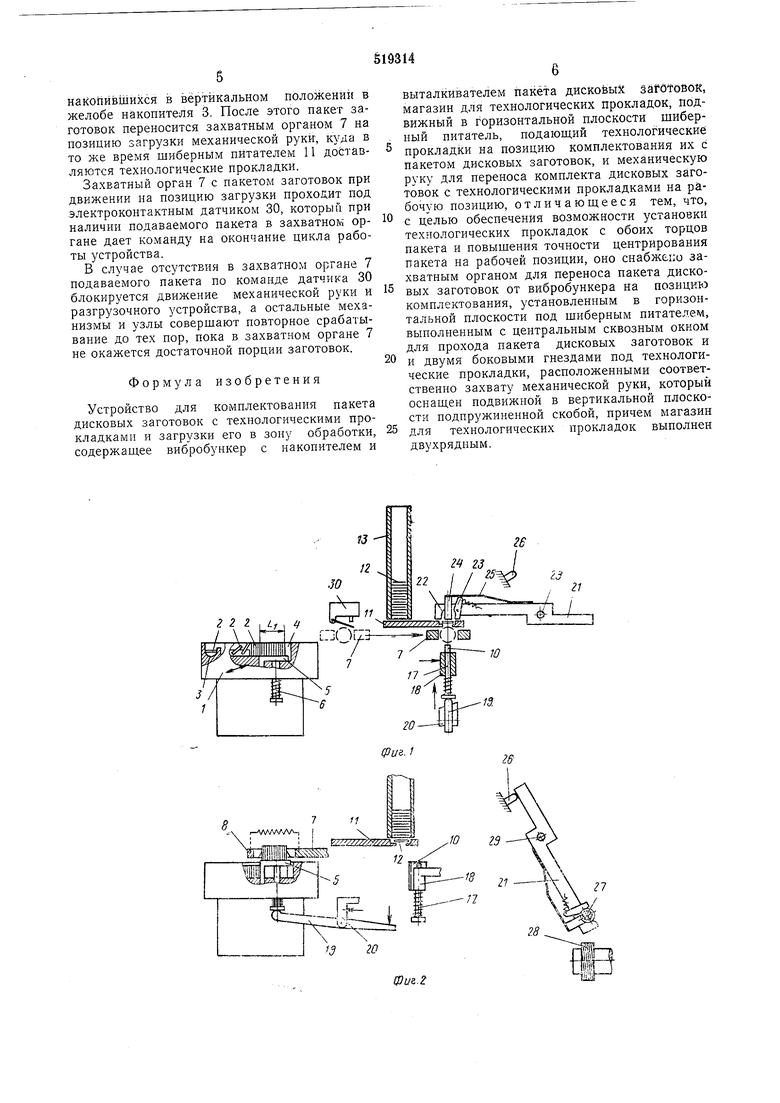
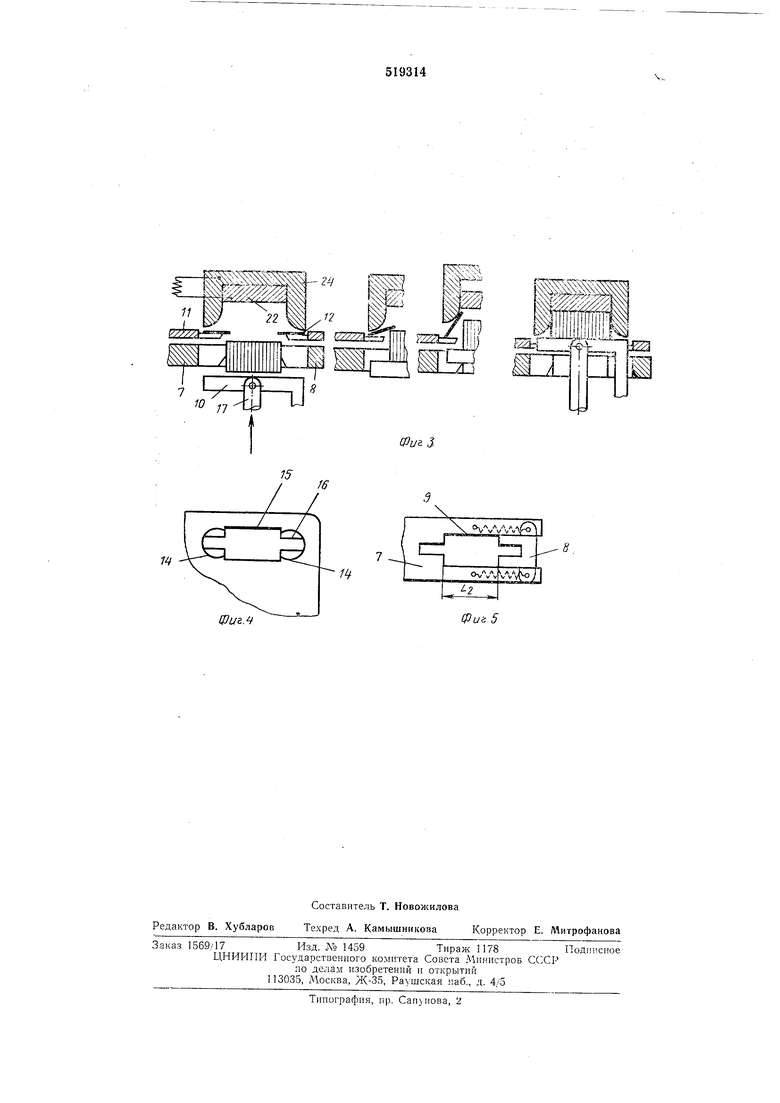
руки. Захват механической руки оснащеи подвижной в вертикальной нлоскости подпружиненной скобой, а магазин для технологических прокладок выполнен двухрядным. На фиг. 1 показаны основные узлы предлагаемого устройства в момент заталкивания пакета заготовок в руку; на фиг. 2 - то же, в момент передачи комплекта заготовок и прокладок в рабочие центры и заталкивания очередного пакета в захватный орган узла поаачи пакета; на фиг. 3 поэлементно показан процесс передачи пакета заготовок и технологических прокладок в захватное гнездо механической руки; на фиг. 4 - конфигурация гнезда в шибере для переноса технологических прокладок; на фиг. 5 - конфигурация гнезда в захватном органе для переноса пакета дисковых заготовок. Описываемое устройство содержит вибробункер 1 для ориентации заготовок 2; в чаше вибробункере имеются: накопитель 3, поперечное сечение которого выполнено в виде желоба, обеспечиваюшего формирование из заготовок пакета с горизонтальной осью, вертикальный упор 4 и выталкиватель с ножевой пластиной 5, укрепленной на подпружиненном штоке 6. Длина LI рабочей части ножевой пластины 5 выталкивателя определяет максимальную величину подаваемого пакета заготовок. Захватный орган 7 для переноса пакета дисковых заготовок закреплен на вертикальной оси (на чертежах не показана) и имеет подпружиненную торцовую стенку 8 для зажима подаваемого пакета дисковых заготовок в гнезде 9 (фиг. 5). В неподвижной и подпружиненной торцовых стенках захватного органа 7 выполнены прорези для прохода толкателя 10. Длина гнезда La онределяет минималь ную величину пакета заготовок, который может быть подан на обработку. Шиберный пнтатель 11 для подачи технологических прокладок 12, поступающих из двухрядного магазина 13, имеет два глухих гнезда 14 ненолного контура для прокладок, сквозное окно15для прохода пакета дисковых заготовок и прорези 16 для прохода толкателя 10 (фиг. 4). Толкатель 10 (фиг. 1 и 2) установлен на подпружиненном штоке 17, который расноложен в корпусе 18. При нажиме снизу на шток 17 рычагом 19, подвешенным в поворотном кронштейне 20, пакет заготовок и технологические прокладки заталкиваются в захватное гнездо механической руки. Механическая рука устройства выполнена в виде двуплечего рычага 21, на длинно.м плече которого расположено захватное гнездо 22 под пакет заготовок (фиг. 1). Одна из губок 23 захватного гнезда подпружинена. Захватное гнездо 22 механической руки снабжено скобой 24, прикрепленной к рычагу 21 посредством плоской пружины 25. Эта скоба обеспечивает переворачивание технологических прокладок в вертикальное положение и удерживает пакет заготовок с технологическими прокладками от выпадания в осевом направлении. Второе плечо рычага 21 служит для фиксации механической руки на упоре 26 при передаче комплекта дисковых заготовок с технологическими прокладками на обработку в центры 27 обслуживаемого станка, где комплект заготовок обрабатывается фрезой 28 (фиг. 2). Механическая рука описываемого устройства установлена на поворотном валу 29, опоры врашения которого расположены в неподвижной стойке, закрепленной на основании обслуживаемой технологической машины (опоры, стойка, основание на чертежах не показаны) . Устройство может быть оснащено электроконтактным датчиком 30 (фиг. 1) для проверки наличия пакета заготовок в захватном органе 7, а также не показанной на чертежах системой повторения цикла пакетирования заготовок в случае их отсутствия в упомянутом захватном органе. Привод устройства (не показан на чертежах) может быть любой известной конструкции, обеспечивающей требуемое согласованное переьшщение всех механизмов и узлов. Устройство работает следующим образом. В исходном положении механическая рука находится на позиции загрузки и отведена от центров 27 станка. Под захватным гнездом руки находится захватный орган 7 с пакетом дисковых заготовок и шиберный питатель И с технологическими прокладками. Пакет заготовок вместе с технологическими прокладками посредством рычага 19 и толкателя 10 заталкивается в захватное гнездо руки. Благодаря тому, что скоба 24 подвешена на нружине 25, процесс заталкивания пакета заготовок в руку и его комплектование с технологическими прокладками происходит именно так, как показано па фиг. 3. Одновременно с этим происходит разгрузка ранее обработанных деталей из центров стайка. После того, как пакет дисковых заготовок с прокладками разместится в захватном гнезде механической руки, шиберный питатель 11, захватный орган 7 и толкатель 10 отводятся из-под механической руки каждый в свое исходное положение, а рука переносит находящийся в. ней комплект заготовок к центрам обрабатывающего станка. После зажима комплекта заготовок цеитрами мехаиическая рука отводится снова на позицию загрузки, а с танок включается на обработку. В то же время шиберный питатель 11 возвращается к магазину 13, забирая оттуда две ехнологические прокладки, захватный орган 7 поворачивается в горизонтальной плоскости в положение, когда его гнездо 9 оказывается над накопителем 3 вибробункера 1, а поворотый кронштейн 20 -- в полол ;ение, когда рыаг 19 оказывается /под штоком 6. Выталкиатель с ножевой 1нласти«ой 5 заталкивает в а.хватный орган 7 пакет дисковых заготовок. накопившихся в вертикальном положении в желобе накопителя 3. После этого пакет заготовок переносится захватным органом 7 на позицию загрузки механической рукьг, куда в то же время шиберным питателем 11 доставляются технологические прокладки. Захватный орган 7 с пакетом заготовок при движении на позицию загрузки проходит под электроконтактным датчиком 30, который при наличии подаваемого пакета в захватном органе дает команду на окончание цикла работы устройства. В случае отсутствия в захватном органе 7 подаваемого пакета по команде датчика 30 блокируется движение механической руки и разгрузочного устройства, а остальные механизмы и узлы совершают повторное срабатывание до тех пор, пока в захватном органе 7 не окажется достаточной порции заготовок. Формула изобретения Устройство для комплектования пакета дисковых заготовок с технологическими прокладками и загрузки его в зону обработки, содержащее вибробункер с накопителем и выталкивателем Пакета дисковых safOtOBOK, магазин для технологических прокладок, подвижный в горизонтальной плоскости шиберный питатель, подаюш,ий технологические прокладки на позицию комплектования их с пакетом дисковых заготовок, и механическую руку для переноса комплекта дисковых заготовок с технологическими прокладками на рабочую позицию, отличающееся тем, что, с целью обеспечения возможности установки технологических прокладок с обоих торцов пакета и повышения точности центрирования пакета на рабочей позиции, оно снабжено захватным органом для переноса пакета дисковых заготовок от вибробункера на позицию комплектования, установленным в горизонтальной плоскости под шиберным питателем, выполненным с центральным сквозным окном для прохода пакета дисковых заготовок и и двумя боковыми гнездами под технологические прокладки, расположенными соответственно захвату механической руки, который оснащен подвижной в вертикальной плоскости подпружиненной скобой, причем магазин для технологических прокладок выполнен двухрядным.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для комплектования пакета дисковых заготовок с технологическими прокладками | 1977 |
|
SU738821A1 |
| Устройство для комплектования пакета дисковых заготовок с технологическими прокладками | 1980 |
|
SU917996A2 |
| Загрузочное устройство | 1972 |
|
SU443740A1 |
| Автоматизированная линия для многопереходной листовой штамповки | 1988 |
|
SU1516198A1 |
| Станок для сборки в пакет пластин и изоляционных прокладок коллекторов электрических машин | 1979 |
|
SU877671A1 |
| Устройство переноса заготовок между позициями матриц | 1981 |
|
SU1007808A1 |
| Устройство для подачи заготовок из магазина в патрон шпинделя токарного, шлифовального и т.п. станков | 1955 |
|
SU114380A1 |
| Автомат для сборки тарелок и сухарей с клапанами ДВС | 1990 |
|
SU1761432A1 |
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ СБОРКИ БЕЛЬЕВЫХ ЗАЖИМОВ И УСТАНОВКИ ИХ НА КАРТОННЫЙ НОСИТЕЛЬ | 1991 |
|
RU2030271C1 |
| Автомат для горячей высадки головок болтов | 1988 |
|
SU1606250A1 |
26
21
Vuz.Z
(Hui J
Фи.ч
Ji.
Фи&5
