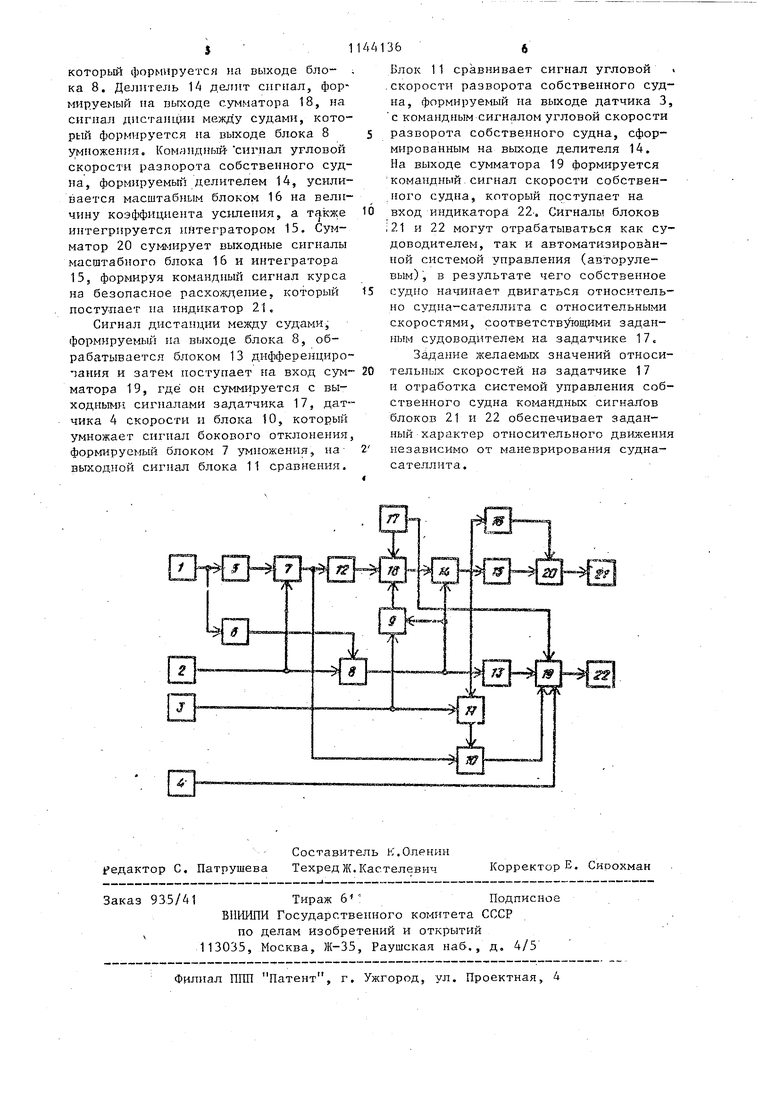
I Изобретение относится к автоматиSHpOBaHHONfy управлению судами и может быть использовано в судовых автоматизированных системах предотвращения столкновений судов. Известно устройство для предотвра щения столкновений судов, содержащее датчики курса, скорости, относительной дальности и пеленга, выходы которых подключены к соответствующим входам электронной вычислительной машины, выход которой соединен с входом индикатора 1 . Недостатками этого устройства . являются сложность, низкая точность и надежность оценки безопасности плавания в случае маневрирования суд на-сателлита, невозможность автоматизации процесса управления движением судов-сателлитов, высокий уровень напряженности работы судоводителя, требование точного определения курса судна-сателлита, что затруднительно в случае его маневрирования. Наиболее близким по технической сущности к изобретеншо является устройство, содержащее датчик пеленга, датчик относительной дальности, датчак скорости судна, синусный и косинусный преобразователи, блоки умножения, блок сравнения, блок деления, интегратор, масштабный блок, сумматоры, индикаторы, причем выход датчика пеленга соединен соответст- венно через синусный и косинусный преобразователи с первьми входами первого и второго блоков умножения, вторые входы которых соединены с вы ходом датчика дальности 2. Однако это устройство оценивает безопасность плавания на основе вычисления времени до точки кратчайшего сближения, а так как время до кратчайшего сближения судов-сателли тов (судов имеющих мало отличающиеся скорости и курсы), как правило, очень велико, то такие суда классиф цируются этим устройством как неопасные. В то время, как даже незна чительное маневрирование судов-сателлитов может привести к их столкновению. Цель изобретения - повышение точ ности работы устройства. Поставленная цель достигается тем, что в устройство для предотвра щения столкновений судов-сателлитов содержащее датчик пеленга, выход ко торого соединен с входами синусно362го и косинусного преобразователей, выходы которых соединены с первыми входами первого и второго блоков умножения соответственно, датчик относительной дальности, выход которого соединен с вторыми входами первого и второго блоков умножения, датчик скорости, масштабный блок, делитель, интегратор, сумматоры, третий и четвертый блоки умножения, блок сравнения и индикаторы, введены два блока дифференцирования, датчик угловой скорости и задатчик, выходы которого соединены с первыми .входами первого и второго сумматоров, выход которого соединен с входом первого индикатора, выход первого блока умножения соединен с входом первого блока дифференцирования и первым входом третьего блока умножения, выходы которых соединены с вторыми входами первого и второго сумматоров соответственно, выход датчика угловой скорости соединен с первыми входами блока сравнения и четвертого блока умножения, выход которого соединен с третьим входом первого сумматора, выход которого соединен с первым входом делителя, выход которого соединен с входами масштабного блока и интегратора и с вторым входом блока сравнения, выход которого соединен с вторым входом третьего блока умножения, выход второго блока умножения соединен с вторыми входами делителя и четвертого блока умножения и с входом второго блока дифференцирования, выход которого соединен с третыш входом второго сумматора, выходы интегратора и масштабного блока соединены с соответствующими входами третьего сумматора, выход которого соединен с входом второго индикатора, выход датчика скорости соединен с четвертым входом второго сумматора. На чертеже изображена структурная схема устройства. Устройство для предотвращения столкновений судов-сате.гтитов содержит датчик 1 пеленга, датчик 2 относительной дальности, датчик 3 угловой скорости, датчик 4 скорости, синусньй преобразователь 5, косинусный- преобразователь 6, блоки 7-10 умножения,блок 11 сравнения, блоки 12 и 13 дифференцирования, делитель 14, интегратор 15, масштабный блок 16, задатчик 17, сумматоры 18-20, (индикаторы 21 и 22. Уравнения движения судна-сателли та в системе координат (х, у), связанной с собственным судном, ось ор динат X которой направлена вдоль вектора скорости собственного судн а ось абсцисс у - вправо, имеют вид il---V.u, + V co5H-, -i + Vy,, где X и у - проекции вектора дистанции между судами на оси координат; VH скорость и угловая ско рость собственного суд на; V,, - скорость судна-сателли У Н - угол между векторами скорости собственного судна и судна сателлита;t - время. Величины X и у определяются из соотношений: у D sin.n X D cos IT , (2 где D - дистанция между судами; П - пеленг на судно-сателлит. Задавая желаемые значения, относ тельных скоростей -Р, cJtгде Xj и УЗ - заданные значения про екций вектора дистанции между судами на оси координат, из (1) можно определить командные сигналы скорости VHH и угловой скорости WK , которые должно вьщерживать собственное судно, чтобы выпо нялись соотношения (3) .nH-Ps, Подставляя из (1) значения V(j,-cos Н, Уц.. sin Н, учитывая (2), окончательно получим V«Ds.nnK-n .-A5) . .cos Величину командного -сигнала курса определяют по соотношению . где - - значение интеграла; К - коэффициент масштабный. Соотношения (5) и (6) позволяют определить командные значения скорости VHH и курса Hti , отработка которых приводит к тому, что скорость изменения дистанции соответствует заданной, независимо от характера маневрирования судна-сателлита. Устройство для предотвращения столкновений судов-сателлитов работает следую цим образом. Датчики 1-4 формируют соответственно сигналы пеленга на судно-сателлит, относительной дальности до него, угловой скорости разворота собственного судна и его скорости соответственно. Преобразователи 5 и 6 осуществляют соответственно синусное и косинусное преобразование сигнала пеленга на судно-сателлит, формируемого на выходе датчика 1. Блок 7 .умножает сигнал синуса пеленга, формируемый на выходе преобразователя 5, на сигнал относительной дальности, формируемый на выходе датчика 2. Блок 8 умножает сигнал косинуса пеленга, формируемый на выходе преобразователя 6, на сигнал относительной дальности, формируемьй на выходе датчика 2. Судоводитель за- дает значения относительных скоростей изменения составляющих вектора дальности на задатчике 17, причем на первом и втором выходах задатчика 17 формируются соответственно заданныв значения боковой и продольной скоростей относительно судна сателлита, которые поступают на входы блоков 18 и 19 соответственно. Сигнал бокового отклонения, формируемый блоком 7 умножения, обрабатывается блоком 12 дифференцирования и затем поступает на вход сумматора 18, где он суммируется с выходными сигналами задатчика 17 и блока 9, который умножает сигнал угловой скорости разворота собствен- . ного судна, формируемый датчиком 3, на сигнал дистанции мезвду судами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для имитации движения судна вблизи берега | 1982 |
|
SU1084830A1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ | 1988 |
|
SU1841091A1 |
| УСТРОЙСТВО РАДИАЛЬНО-КРУГОВОЙ РАЗВЕРТКИ ИНДИКАТОРОВ КРУГОВОГО ОБЗОРА СУДОВЫХ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 1980 |
|
SU1840930A1 |
| Датчик угловой скорости | 1981 |
|
SU1010566A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ СМЕЩЕНИЯ ЦЕНТРА МАСС АППАРАТА | 2000 |
|
RU2176810C2 |
| СПОСОБ И УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ НАДВОДНОЙ ЦЕЛИ В МОНОИМПУЛЬСНОЙ РЛС | 2004 |
|
RU2278397C2 |
| ПОДВОДНЫЙ АППАРАТ | 2011 |
|
RU2466055C2 |
| Устройство для моделирования качки | 1986 |
|
SU1334168A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ МЕЖДУ ВОЗДУШНЫМИ СУДАМИ | 2007 |
|
RU2346293C2 |
| Вентильный электропривод | 1986 |
|
SU1319221A1 |
УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ СУДОВ-САТЕЛЛИТОВ содержащее датчик пеленга, выход которого соединен с входами синусного и косинусного преобразователей, выходы которых соединены с первыми входами первого и второго блоков умножения соответственно, датчик относительной дальности, выход которого соединен с вторыми входами первого и второго блоков умножения, датчик скорости, .масштабньй блок, делитель, интегратор, сумматоры, третий и четвертый блоки умножения, блок .сравнения и индикаторы, отличающееся тем, что, с целью повышения точности в работе, в него введены два блока дифференцирования., датчик угловой скорости и задатчик, выходы которого соединены с первыми входами первого и второго сумматоров, выход которого соединен с входом первого индикатора, выход первого блока умножения соединен с входом первого блока дифференцирования и первым входом третьего блока умножения, выходы которых соединены с вторыми входами первого и второго сумматоров соответственно,выход датчика угловой скорости соединен с первыми входами блока сравнения и четвертого блока умножения, выход которого соединен с третьим входом первого сумматора, выход которого соединен с первым входом делителя, выход которого соединен с входами W масштабного блока и интегратора и с вторым входом блока сравнения, выход которого соединен с вторым входом третьего блока умножения, выход второго блока умножения соединен с вторыми входами делителя и четвертого блока умножения и с вхо4;; дом второго блока дифференцирования, 4 выход которого соединен с третьим входом второго сумматора, выходы инсо тегратора и масштабного блока сое05 динены с соответствующими входами третьего сумматора, выход которого соединен с входом второго индикатора, выход датчика скорости соединен с четвертым входом второго сумматора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 3725918, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Якушенков А.А., Денисов К.И | |||
| и др | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| М-., Транспорт, 1967, с | |||
| Катодная трубка Брауна | 1922 |
|
SU330A1 |
