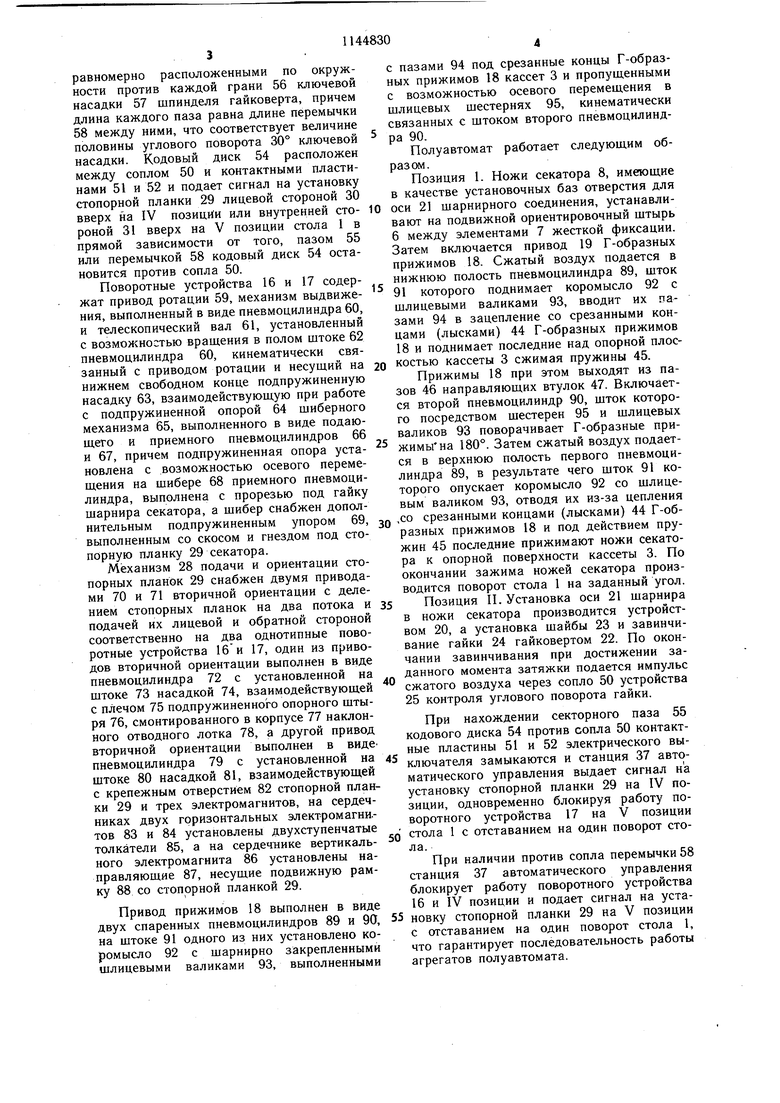
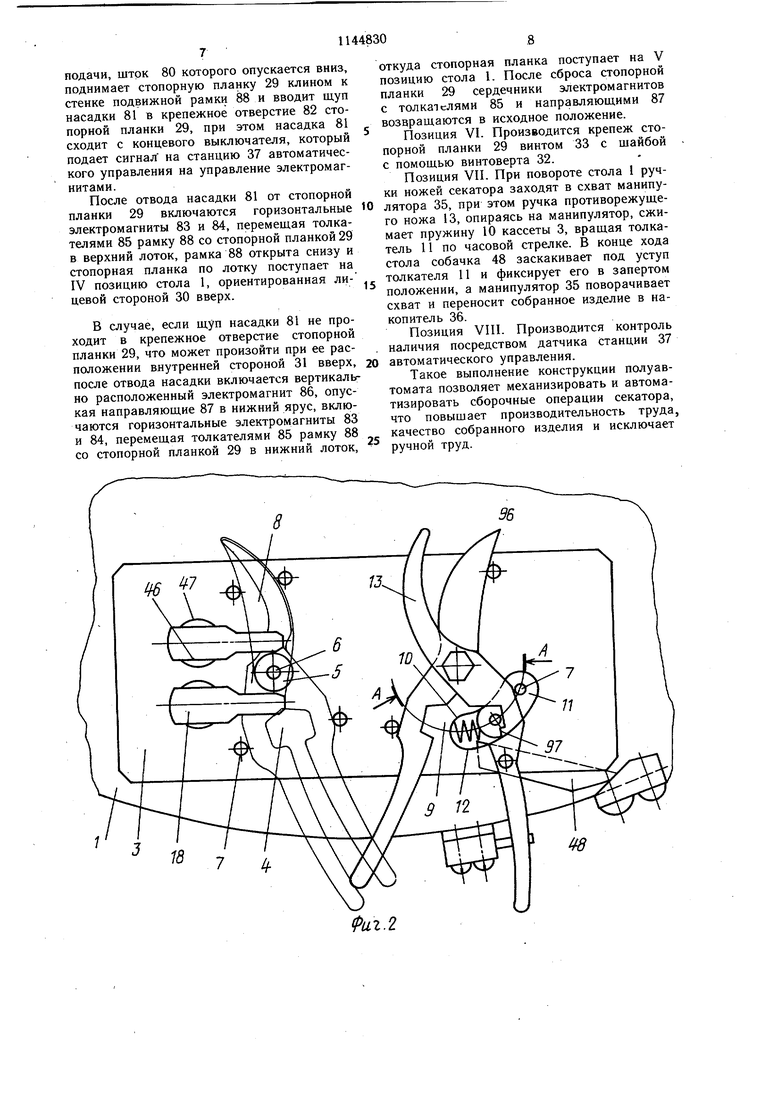
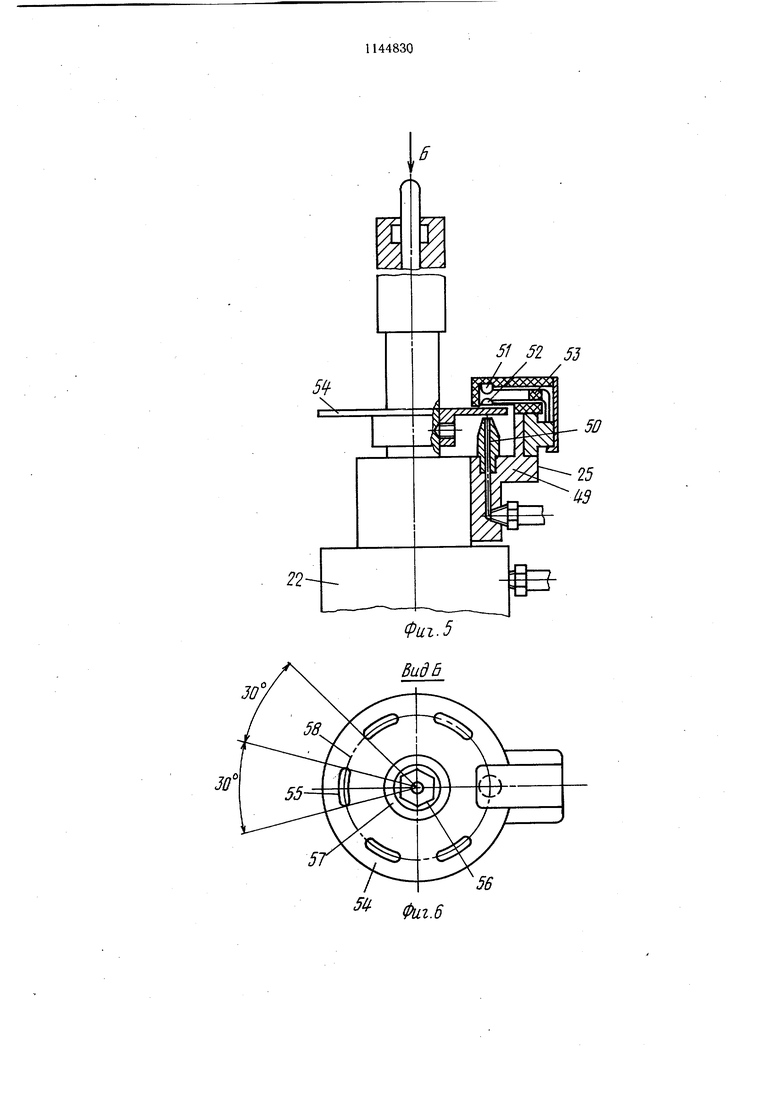
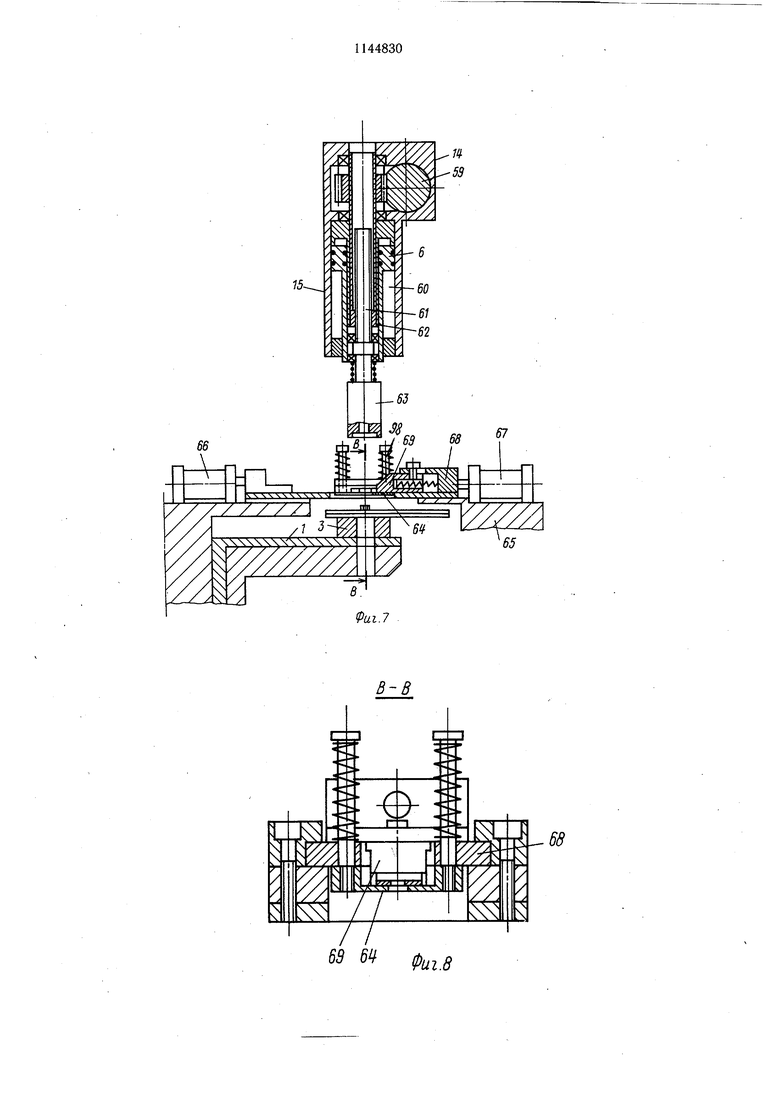
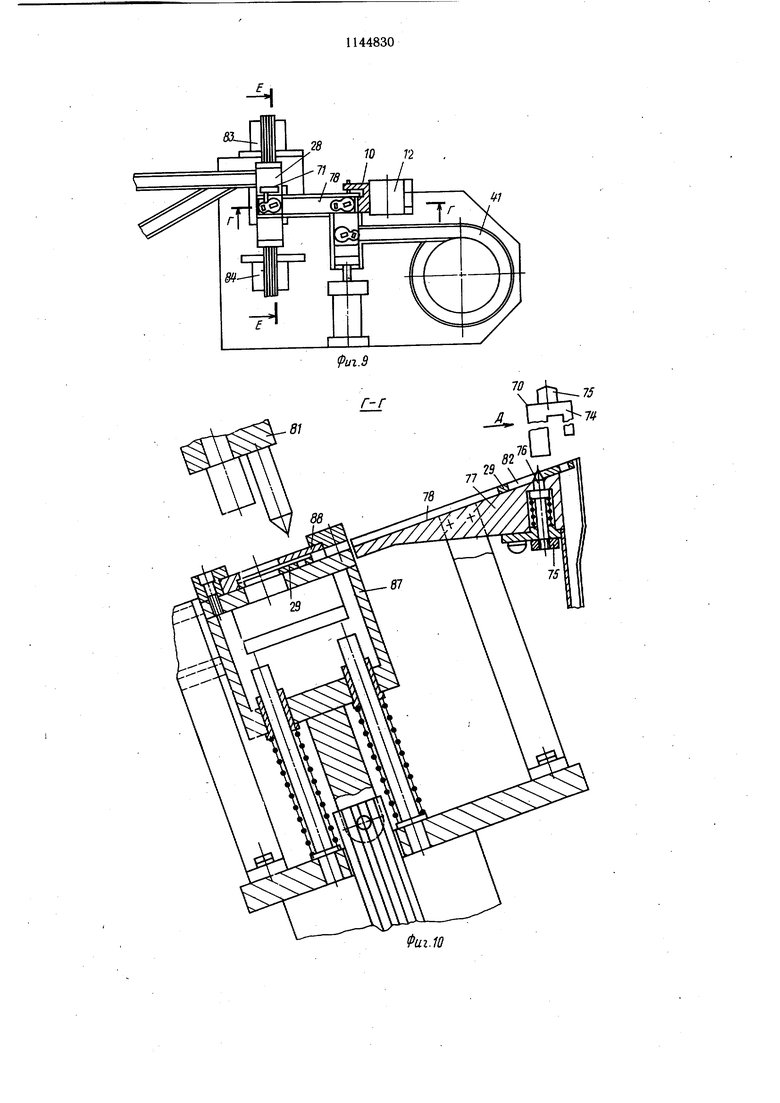
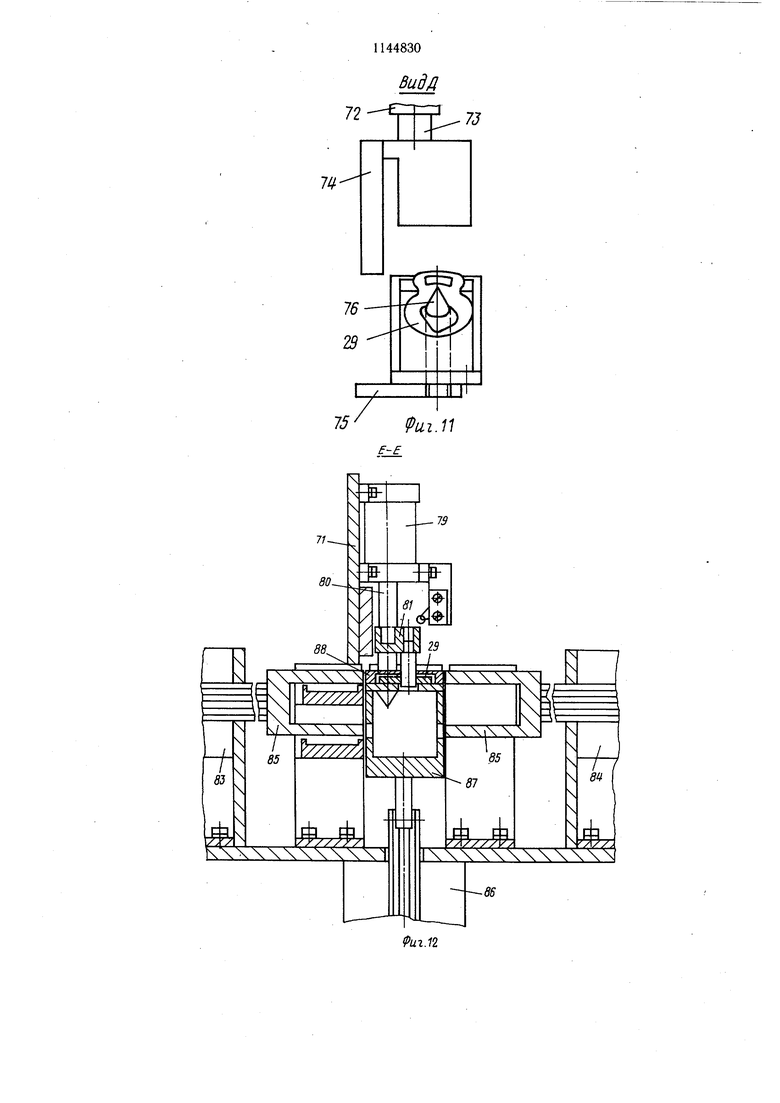
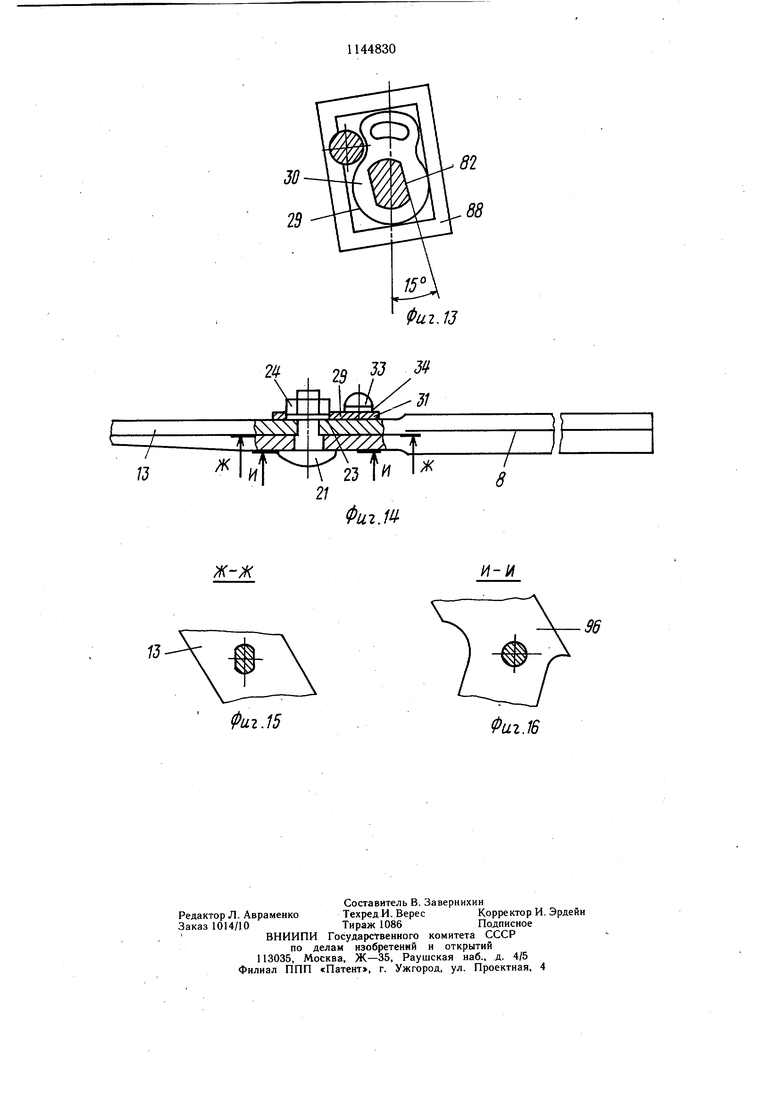
Изобретение относится к машиностроению и может быть использовано для сборки секаторов. Известен сборочный автомат, содержащий станину, многопозиционный поворотный стол с держателями и расположенные вокруг него устройства для технологических и контрольных операций, ориентации, подачи и сортировки собираемых деталей 1. Однако из-за использования механизмов ориентации для деталей симметричной формы надежность сборки деталей несимметричной формы на данном автомате невелика. Целью изобретения является повышение надежности и качества сборки при использовании деталей усложненной конфигурации. Поставленная цель достигается тем, что в полуавтомате для сборки секаторов, содержащем станину, многопозиционный поворотный стол с держателями и расположенными вокруг него устройствами для технологических и контрольных операций, ориентации, подачи и сортировки собираемых деталей, устройство ориентации стопорных планок выполнено в виде механизма вторичной ориентации,, связанного с механизмом деления потока стопорных планок, причем механизм вторичной ориентации содержит двухступенчатую насадку, которая установлена на щток силового цилиндра и взаимодействует одной ступенью с плечом подпружиненного опорного щтыря, смонтированного в корпусе наклонного отводного лотка, а механизм деления потока стопорных планок содержит подвижную рамку с пазом в боковой стенке для подачи стопорной шайбы, которая установлена в направляющих призмах на подкладке, соединенной с приводом вертикального перемещения,- и клиновой ориентатор и щуп, которые установлены на силовом штоке, взаимодействующем с концевым выключателем. На фиг. I изображена принципиальная схема полуавтомата; на фиг. 2 - схема кассеты с изделием; на фиг. 3 - сечение А-А на фиг. 2; на фиг. 4 - привод зажимов кассет; на фиг. 5 - устройство контроля углового поворота гайки шарнирного соединения секатора; на фиг. 6 - вид Б на фиг. 5; на фиг. 7 - поворотное устройство; на фиг. 8 - сечение В-В на фиг. 7; на фиг. 9 - механизм ориентации и подачи стопорной планки секатора; на фиг. 10 - сечение Г-Г на фиг. 9; на фиг. 11 - вид Д на фиг. 10; на фиг. 12 - сечение Е-Е на фиг. 9; на фиг. 13 - подвижная рамка механизма ориентации и подачи со стопорной планкой секатора; на фиг. 14 - изображен секатор в сборе; на фиг. 15 - сечение Ж-Ж на фиг. 14; на фиг. 16 - сечение И-И на фиг. 14. Полуавтомат для сборки секаторов выполнен в виде восьмипозиционнрго станка карусельного типа. Поворотный стол 1 смонтирован на станине 2. На поверхности стола закреплены двухпозиционные кассеты 3, на первой позиции 4 выполнен канал 5 для прохождения выдвижного ориентировочного штыря 6 и элементы 7 жесткой фиксации секатора 8, а на второй позиции 9 выполнена пружина 10, аналогичная секаторной, и толкатель 11, подвижно установленный в секторном пазу 12 кассеты с возможностью регулировки хода противорежущего ножа 13 секатора и электрически связанный посредством последнего с приводами 14 и 15 поворотных устройств 16 и 17. Позиция 1. Кассета 3 с Г-образными прижимами 18 и элементами 7 жесткой фиксации секатора и привод 19 прижимов. Позиция II. Устройство 20 установки оси 21 шарнира секатора, гайковерт 22 установки щайбы 23 и завинчивания гайки 24 и устройство 25 контроля углового поворота гайки шарнирного соединения секатора. Позиция III. Второй привод 26 прижимов 18 и манипулятор 27 для перестановки подсобранного секатора на вторую позицию 9 кассеты 3. Позиция IV и V. Однотипные поворотные устройства 16 и 17 и связанный с ними механизм 28 подачи и ориентации стопорных планок 29, для установки их лицевой стороной 30 вверх на IV позиции или внутренней стороной 31 вверх на V позиции стола I. Позиция VI. Винтоверт 32 для крепления стопорной планки 29 винтом 33 с шайбой 34. Позиция VII. Манипулятор 35 для переноса собранного секатора в накопитель 36. Позиция VIII. Станция 37 автоматического управления: Кроме того, на станине 2 установлены бункера: бункер 38 для осей 21 шарнира; бункер 39 для гайки 24; бункер 40 для шайбы 23 шарнирного соединения, бункер 41 для стопорных планок 29; бункер 42 для винтов 33 и бункер 43 для шайбы 34. Г-образные прижимы 18 первой позиции 4 кассет 3 выполнены на нижнем цилиндрическом конце с лысками 44, поджаты к опорной плоскости кассет пружинами 45 и фиксируются в двух положениях пазом 46 направляющих втулок 47. На второй позиции 9 кассеты толкатель 11 фиксируется собачкой 48. Устройство 25 контроля углового поворота гайки 24 выполнено в виде струйного датчика, состоящего из корпуса 49, сопла 50, контактных пластин 51 и 52, электрического выключателя 53 и установлено с возможностью взаимодействия с закрепленными на шпинделе гайковерта 22 кодовым диском 54, выполненным с секторными пазами 55, равномерно расположенными по окружности против каждой грани 56 ключевой насадки 57 шпинделя гайковерта, причем длина каждого паза равна длине перемычки 58 между ними, что соответствует величине половины углового поворота 30° ключевой насадки. Кодовый диск 54 расположен между соплом 50 и контактными пластинами 51 и 52 и подает сигнал на установку стопорной планки 29 лицевой стороной 30 вверх на IV позиции или внутренней стороной 31 вверх на V позиции стола 1 в прямой зависимости от того, пазом 55 зависимости от того, пазом или перемычкой 58 кодовый диск 54 остановится против сопла 50. Поворотные устройства 16 и 17 содержат привод ротации 59, механизм выдвижения, выполненный в виде пневмоцилиндра 60, и телескопический вал 61, установленный с возможностью вращения в полом штоке 62 пневмоцилиндра 60, кинематически связанный с приводом ротации и несущий на нижнем свободном конце подпружиненную насадку 63, взаимодействующую при работе с подпружиненной опорой 64 шиберного механизма 65, выполненного в виде подающего и приемного пневмоцилиндров 66 и 67, причем подпружиненная опора установлена с возможностью осевого перемещения на щибере 68 приемного пневмоцилиндра, выполнена с прорезью под гайку шарнира секатора, а шибер снабжен дополнительным подпружиненным упором 69, выполненным со скосом и гнездом под стопорную планку 29 секатора. Механизм 28 подачи и ориентации стопорных планок 29 снабжен двумя приводами 70 и 71 вторичной ориентации с делением стопорных планок на два потока и подачей их лицевой и обратной стороной соответственно на два однотипные поворотные устройства 16 и 17, один из приводов вторичной ориентации выполнен в виде пневмоцилиндра 72 с установленной на штоке 73 насадкой 74, взаимодействующей с плечом 75 подпружиненного опорного штыря 76, смонтированного в корпусе 77 наклонного отводного лотка 78, а другой привод вторичной ориентации выполнен в видепневмоцилиндра 79 с установленной на щтоке 80 насадкой 81, взаимодействующей с крепежным отверстием 82 стопорной планки 29 и трех электромагнитов, на сердечниках двух горизонтальных электромагни.тов 83 и 84 установлены двухступенчатые толкатели 85, а на сердечнике вертикального электромагнита 86 установлены направляющие 87, несущие подвижную рамку 88 со стопорной планкой 29. Привод прижимов 18 выполнен в виде двух спаренных пневмоцилиндров 89 и 90, на штоке 91 одного из них установлено коромысло 92 с щарнирно закрепленными шлицевыми валиками 93, выполненными с пазами 94 под срезанные концы Г-образных прижимов 18 кассет 3 и пропущенными с возможностью осевого перемещения в шлицевых шестернях 95, кинематически связанных с штоком второго пневмоцилиндра 90. Полуавтомат работает следующим образом. Позиция 1. Ножи секатора 8, имеющие в качестве установочных баз отверстия для оси 21 шарнирного соединения, устанавливают на подвижной ориентировочный штырь 6 между элементами 7 жесткой фиксации. Затем включается привод 19 Г-образных прижимов 18. Сжатый воздух подается в нижнюю полость пневмоцилиндра 89, щток 91 которого поднимает коромысло 92 с щлицевыми валиками 93, вводит их пазами 94 в зацепление со срезанными концами (лысками) 44 Г-образных прижимов 18 и поднимает последние над опорной плоскостью кассеты 3 сжимая пружины 45. Прижимы 18 при этом выходят из пазов 46 направляющих втулок 47. Включается второй пневмоцилиндр 90, щток которого посредством шестерен 95 и шлицевых валиков 93 поворачивает Г-образные прижимы на 180°. Затем сжатый воздух подается в верхнюю полость первого пневмоцилиндра 89, в результате чего шток 91 которого опускает коромысло 92 со шлицевым валиком 93, отводя их из-за цепления срезанными концами (лысками) 44 Г-образных прижимов 18 и под действием пружин 45 последние прижимают ножи секатора к опорной поверхности кассеты 3. По окончании зажима ножей секатора производится поворот стола 1 на заданный угол. Позиция П. Установка оси 21 шарнира в ножи секатора производится устройством 20, а установка шайбы 23 и завинчивание гайки 24 гайковертом 22. По окончании завинчивания при достижении заданного момента затяжки подается импульс сжатого воздуха через сопло 50 устройства 25 контроля углового поворота гайки. При нахождении секторного паза 55 кодового диска 54 против сопла 50 контактные пластины 51 и 52 электрического выключателя замыкаются и станция 37 автоматического управления выдает сигнал на установку стопорной планки 29 на IV позиции, одновременно блокируя работу поворотного устройства 17 на V позиции стола 1 с отставанием на один поворот стола. При наличии против сопла перемычки 58 станция 37 автоматического управления блокирует работу поворотного устройства 16 и IV позиции и подает сигнал на установку стопорной планки 29 на V позиции с отставанием на один поворот стола 1, что гарантирует последовательность работы агрегатов полуавтомата. Позиция III. Производится разжим подсобранного секатора с помощью привода 26 прижимов 18 (аналогично операции I позиции) и с помощью манипулятора 27 производится перестановка секатора на вторую позицию 9 кассеты 3 с переворотом его на 180°. При этом секатор ложится режущим ножом 96 на кассету 3, а ручкой противорежущего ножа 13 устанавливается между элементами 7 жесткой фиксации на подвижный толкатель 11, зафиксированный собачкой 48 в уступ 97. Позиция IV, V. Подача и ориентация стопорных планок 29 с делением их на два потока и установкой лицевой стороной 30 вверх на IV позиции или внутренней стороной 31 вверх на V позиции стола 1 обеспечивается двумя однотипными поворотными устройствами 16 и 17 и связанным с ними механизмом 28 подачи и ориентации. По наклонному лотку 78 стопорная планка 29 под действием тяжести соскальзывает в подвижную рамку 88, проходя через паз, выполненный в ее боковой стенке, устанавливается и удерживается тремя ее стенками на подкладке направляющей 87. Подвижная рамка 88 также лежит на плоскости подкладки с возможностью перемещения по ней вместе со стопорной планкой в призмах направляющей 87. Перемещение . рамки осуществляется горизонтальными электромагнитами 83 и 84, которые смещают рамку со стопорной планкой за пределы подкладки. Рамка переходит в стационарные призмы, расположенные по краям рамки и за пределами направляющей 87, а стопорная планка выпадает из нее в лоток. ,,„„ Стопорная планка 29 пневмоцилиндром 66 подается на подпружиненную опору 64, установленную на шибере 68 второго пневмоцилиндра 67 шиберного механизма 65 и дополнительно ориентируется в гнезде подпружиненного упора 69. Затем включается механизм 60 выдвижения поворотного устройства 16, выдвигая телескопический вал 61 с насадкой 63, которая нажимая на скос подпружиненного f-t упора 69, отодвигает его, надевается на стопорную планку 29 и, продолжая опускаться, сжимает пружины 98 и опускает опору 64 к секатору. При этом гайка 24 секатора входит в прорезь опоры 64. Стопорная ка 29 поджимается к гайке 24 и щибер 68 с опорой 64 отводится из-под стопорной планки 29. Включается привод ротации 59 поворотного устройства 16, телескопический вал 61 с насадкой 63, поворачиваясь относительно гайки 24, надевает на нее стопорную планку 29 и отворачивает гайку, уменьшая момент затяжки шарнирного соединения секатора. При повороте стола собачка 48 находит на упор, и поворачираясь, освобождает толкатель 11. При отвинчивании гайки 24 в тот момент, когда усилие пружины 10 начинает превыщать момент затяжки, гайки шарнирного соединения секатора, толкатель 11 перемещает ручку противорежущего ножа 13 против часовой стрелки. При этом ось 21 щарнирного соединения зафиксирована лыской в овальном отверстии противорежущего ножа 13 секатора и, поворачиваясь вместе с ним относительно гайки 24, вновь затягивает ножи секатора, уменьшая зазор между ними, гайка в этот момент зафиксирована от поворота стопорной планкой 29. Когда ручка противорежущего ножа 13 секатора при повороте достигает концевого электрического выключателя, происходит выключение привода ротации 59 и отвод от секатора насадки 63. Если ручка противорежущего ножа 13 еще не достигла концевого выключателя, работа привода ротации продолжается до момента выборки необходимого зазора между ножами секатора, при котором ручка противорежущего ножа 13 легко, но без люфта, доходит до концевого выключателя и выключает поворотное устройство 16. При подаче стопорной планки 29 внутренней стороной 31 вверх установка ее производится аналогично на V позиции стола 1. Это необходимо в том случае, когда диапазона радиусного паза стопорной планки 29 недостаточно для регулировки хода ножей секатора и требуется его продолжение, для этого стопорная планка устанавливается отверстием 82 в другой половине углового поворота путем ее переворота, внутренней стороной вверх. Сигнал нужной установки стопорной планки подается устройством 25 контроля углового поворота при затяжке гайки 24. Необходимая ориентация и деление потока Необходимая ориентация и деление стопорных планок 29 производится механизмом 28 ориентации и подачи. Пневмоцилиндр подает первично ориентированную в один ряд стопорную план29 на наклонный лоток 78. Стопорная планка зависает крепежным отверстием 82 на опорном штыре 76 поджатой вверх пружиной. Включается пневмоцилиндр 72 вторичной ориентации, щток 73 которого UlVX| rJ l../nV IllC4JLI,IlIl.. ч (UfI I J ij J I J опускается вниз и насадкой 74 сбрасывает стопорную планку 29 в вертикальный ло J стопорная планкэ 29 подана сек J / 5 щтыря 76. сжимает пру„ наклонной плоскости лотка 78, а стопорная планка 29 скатывается под собственным весом по лотку вниз, где оба лотка соединяются в один лоток с направлением планок секторным пазом вперед. Передняя стопорная планка заходит в подвижную рамку 88, установленную в направляющих 87 электромагнита 86, включается пневмоцилиндр 79 механизма 28 подачи, шток 80 которого опускается вниз, поднимает стопорную планку 29 клином к стенке подвижной рамки 88 и вводит щуп насадки 81 в крепежное отверстие 82 стопорной планки 29, при этом насадка 81 сходит с концевого выключателя, который подает сигнал на станцию 37 автоматического управления на управление электромагнитами. После отвода насадки 81 от стопорной планки 29 включаются горизонтальные электромагниты 83 и 84, перемещая толкателями 85 рамку 88 со стопорной планкой 29 в верхний лоток, рамка 88 открыта снизу и стопорная планка по лотку поступает на IV позицию стола 1, ориентированная лицевой стороной 30 вверх. В случае, если щуп насадки 81 не проходит в крепежное отверстие стопорной планки 29, что может произойти при ее расположении внутренней стороной 31 вверх, после отвода насадки включается вертикаль но расположенный электромагнит 86, опуская направляющие 87 в нижний ярус, включаются горизонтальные электромагниты 83 и 84, перемещая толкателями 85 рамку 88 со стопорной планкой 29 в нижний лоток, откуда стопорная планка поступает на V позицию стола I. После сброса стопорной планки 29 сердечники электромагнитов с толкателями 85 и направляющими 87 возвращаются в исходное положение. Позиция VI. Производится крепеж стопорной планки 29 винтом 33 с шайбой с помощью винтоверта 32. Позиция VII. При повороте стола 1 ручки ножей секатора заходят в схват манипулятора 35, при этом ручка противорежущего ножа 13, опираясь на манипулятор, сжимает пружину 10 кассеты 3, вращая толкатель 11 по часовой стрелке. В конце хода стола собачка 48 заскакивает под уступ толкателя 11 и фиксирует его в запертом положении, а манипулятор 35 поворачивает схват и переносит собранное изделие в накопитель 36. Позиция VIII. Производится контроль наличия посредством датчика станции 37 автоматического управления, Такое выполнение конструкции полуавтомата позволяет механизировать и автоматизировать сборочные операции секатора, что повышает производительность труда, качество собранного изделия и исключает ручной труд.
и

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сборки шарнирного соединения секаторов | 1983 |
|
SU1271702A1 |
| Автоматическая роторная линия для сборки радиочастотных соединителей | 1978 |
|
SU785924A1 |
| Многопозиционный автомат | 1983 |
|
SU1202778A1 |
| Устройство для установки мебельной фурнитуры | 1985 |
|
SU1329969A1 |
| Многопозиционная машина для бесшвейного скрепления предварительно зажатых в контейнеры книжных блоков | 1958 |
|
SU119866A1 |
| Автомат для сборки сердечников магнитопроводов электрических машин | 1980 |
|
SU959220A1 |
| Полуавтомат для сборки пластинчатых магнитопроводов трансформаторов | 1986 |
|
SU1399827A1 |
| Полуавтомат для прошивки деталей и узлов швейных изделий | 1958 |
|
SU121331A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| Автомат для сборки пластинчатых магнитопроводов электрических машин | 1981 |
|
SU991553A1 |
ПОЛУАВТОМАТ ДЛЯ СБОРКИ СЕКАТОРОВ, содержащий станину, многопозиционный поворотный стол с держателями и расположенные вокруг него устройства для технологических и контрольных операций, ориентации, подачи и сортировки собираемых деталей, отличающийся тем, что, с целью повышения надежности и качества сборки, устройство ориентации стопорных планок выполнено в виде механизма вторичной ориентации, связанного с механизмом деления потока стопорных планок, причем механизм вторичной ориентации содержит двухступенчатую насадку, которая установлена на штоке силового цилиндра и взаимодействует одной ступенью с плечом подпружиненного опорного штыря, смонтированного в корпусе наклонного отводного лотка, а механизм деления потока стопорных планок содержит подвижную рамку, с пазом в боковой стенке для подачи стопорной шайбы, которая установлена в направляюш,их призмах на подкладке, соединенной с приводом вертикального перемешения, и клиновой ориентатор и щуп, которые установлены на силовом штоке, взаимодействующем с концевым выключа(Л телем. 4; 4 оо со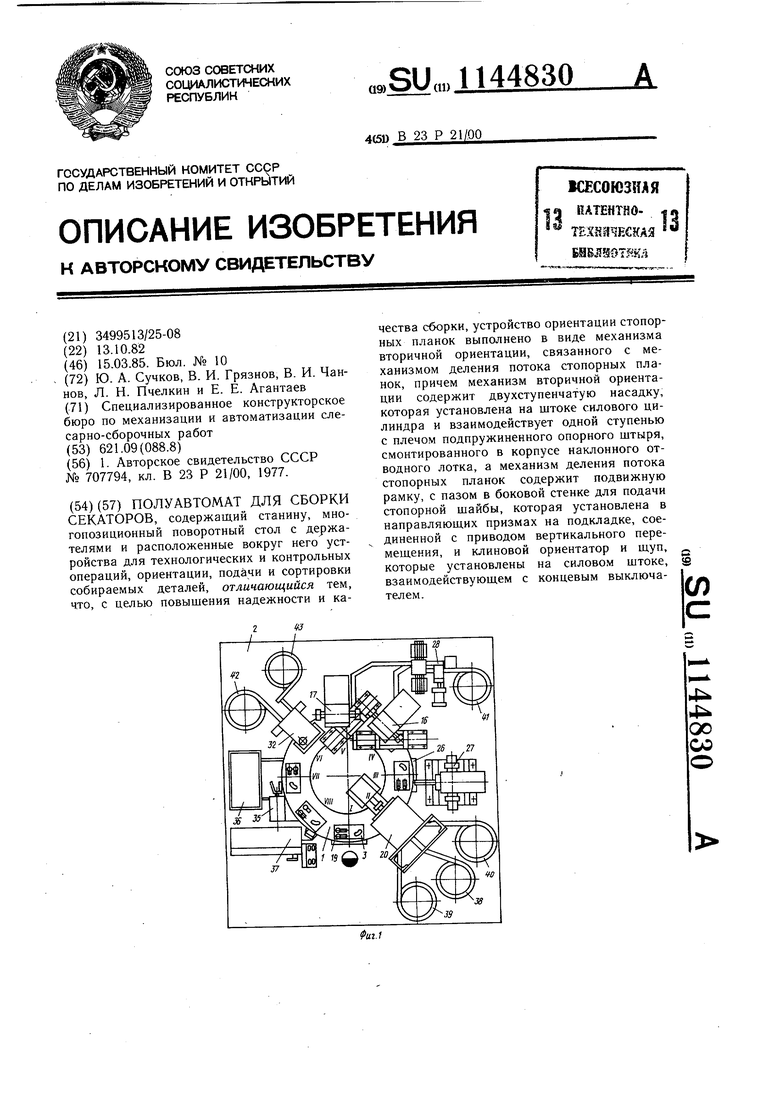
51 52 53 / / /
56
Фиг.6
477
/ I
63 Ы ф,8
и
68
. / / г
S
W
Фиг.Ю
ВидД
7J
8088
.
у//////
ij:
Т У//////
85
81 / /
29
т
т
I (94
±
1//..
Фиг.16
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ раскряжевки пачки хлыстов | 1978 |
|
SU707794A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
