подключены к дополнительным входам блока логического выбора параметров силового режима, вторые выходы дополнительных блоков адаптивного порогового контроля подключены к вторым входам дополнительных индикаторов сра:внения текущих значений интегральных параметров с текущими значенияьш порогов контроля.
2. Устройство по п. 1, отличающееся тем, что блок , адаптивного порогового контроля выполнен в виде операциЬнного усилителя и трех электрически управляемых потенциометров, имеющих по два входа управления, первый вход операционного усилителя соединен с входом первого электрически управляемого потенциометра иявляется первым основньм входом блока адаптивного порогового контроля, входад второго и третьего электрически управляемых потенциометров соединены между собой и являются вторым основным входом блока адаптивного порогового контро45098
ля, выходы второго и третьего электрически управляемых потенцио, метров подключены к входам управления первого электрически управляемого потенциометра, а входы управления второго и третьего электрически управляемых потенциометров являются соответственно основными и дополнительными входами адаптации блока адаптивного порогового контроля, выход операционного усилителя является первым, а выход первого электрически управляемого потенциометра, соединенный с вторым входом операционного усилителя, вторым входом блока адаптивного порогового контроля.
3. Устройство по п. 1, отличающееся тем, что блок упрежденного вычисления текущего значения допустимой скорости перемещения отвальной консоли отвалорбразователя выполнен в виде набора пороговых элементов.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматизированного контроля загруженности металлоконструкций оборудования роторных комплексов | 1981 |
|
SU977622A1 |
| Устройство для автоматизированного контроля силового режима металлоконструкций оборудования роторных комплексов | 1984 |
|
SU1159991A1 |
| Устройство для автоматизированного контроля силового режима металлоконструкций машин роторных комплексов | 1984 |
|
SU1209772A1 |
| Устройство для контроля и управления режимом работы роторного комплекса | 1984 |
|
SU1180461A1 |
| Устройство для контроля и управления режимом работы роторного комплекса | 1986 |
|
SU1421837A2 |
| Способ управления роторным комплексом и устройство для его осуществления | 1987 |
|
SU1537776A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО КОНТРОЛЯ ЗАГРУЗКИ СТРЕЛЫ ОТВАЛООБРАЗОВАТЕЛЯ ПОРОДОЙ | 1973 |
|
SU386098A1 |
| Устройство для контроля силового режима металлоконструкций горно-транспортных машин | 1985 |
|
SU1305274A1 |
| Система автоматизированного управления роторным экскаватором | 1983 |
|
SU1164374A1 |
| Система автоматизированного управления роторным экскаватором | 1985 |
|
SU1266942A2 |
1. УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОГО КОНТРОЛЯ ЗАГРУЖЕННОСТИ ЖТАЛЛОКОНСТРУКЦИЙ ОБОРУДОВАНИЯ РОТОРНЫХ КОМПЛЕКСОВ по авт. св. № 977622, отличающееся тем, что, с целью повьшения производительности роторного комплекса путем обеспечения работы его во время перемещения отвалообразователя и расширения функциональных возможностей устройства, оно дополнительно снабжено блоком упрежденного вычисления текущего значения момента инерции .потока грунта на конвейере отвальной консоли отвалообразователя, блоком упрежденного вычисления текущего значения допустимой скорости перемещения отвальвой консоли отвалообразователя, двзгмя блоками адаптивного порогового, контроля, двумя индикаторами сравнения текупшх значений интегральных параметров с текущиьш значениями порогов контроля и двумя блоками установки допустимых пороговых значений контролируемых парат метров, первый и второй входы блока упрезвдённого вычисления текущего значения момента инерции потока грунта на конвейере отвальной консоли отвалообразователя подключены соответственно к выходам измерителя интенсивности потока в начальной зоне конвейера роторного экскаватора и блока контроля движения ленты конвейера, выход блока упрежденного вычисления текущего значения момента инерции потока грунта на конвейере отвальной консоли отвалообразователя подключен к первому входу одного дополнительного индикатора сравнения текущих значений интегральных параметров с текущими значениями порогов контроля, к первому основному входу первого дополнительного блока адаптивного порогового конт(Л роля и к первым дополнительным входам адаптации остальных блоков адаптивного порогового контроля, а также через блок упрежденного вычисления текущего значения допустимой скорости перемещения .отвальной консоли отвалообразователя к первому входу другого дополниш( тельного индикатора сравнения-теел кущих значений интегральных парамвто со сх ров с текущими значениями порогов контроля, к первому основному входу второго дополнительного блока адаптивного порогового контроля и к вторьм OIioлнитeльньм входам адаптации остальных блоков адаптивного порогового контроля, выходы дополнительных блоков установки допустимых пороговых значений контролируемых параметров подключены к вторым основным входам дополнительных блоков адаптивного порогового контроля, первые выходы которых. 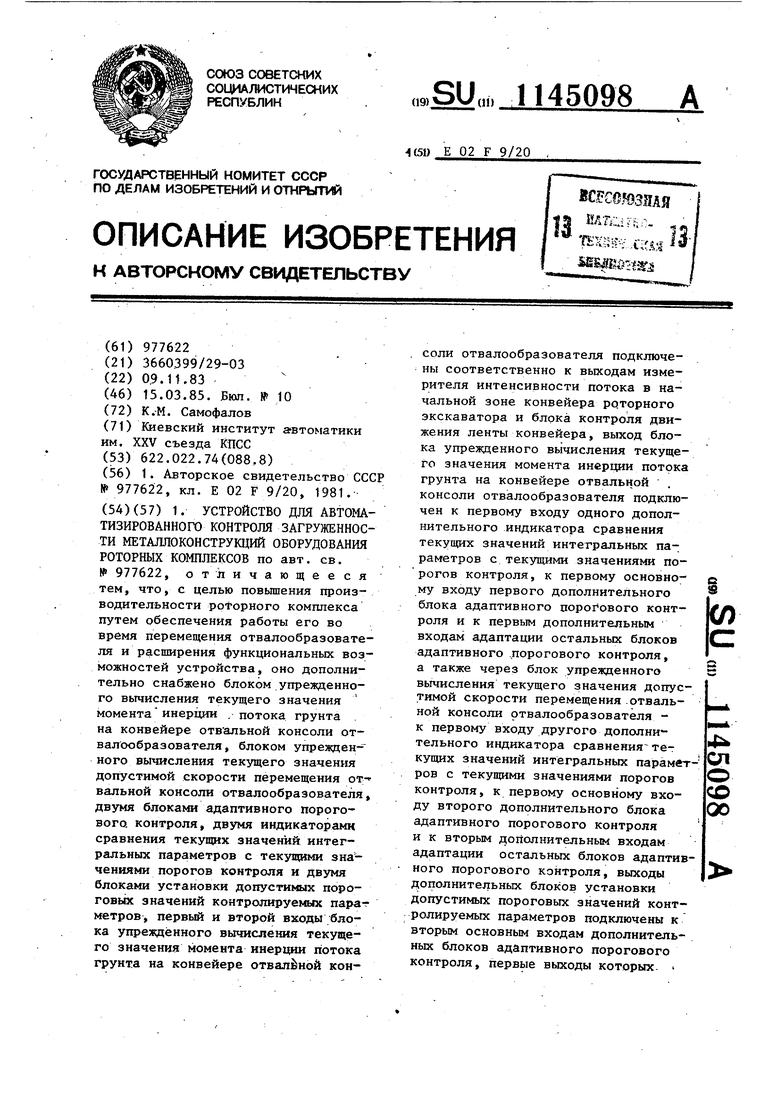
Изобретение относится к предохранительным устройствам и сигнализации и управления экскаваторов , отвалообразователей и тому подобных машин.
Надежная защита металлоконструкций машин и комплексов горно-транспортного оборудования является одним из главных факторов повышения коэффициентов использования высокопроизводительного и дорогостоящего оборудования непрерывного действия. Непрерывный контроль силового режима металлоконструкций оборудования роторного комплекса позволяет машинисту роторного экскаватора вести оптимальный режим работы роторного комплекса.
Определение устройством автоматизированного контроля загруженности металлоконструкций оборудования . роторных комплексов текущего значения момента инерции потока вскрышного грунта на конвейере отвальной консоли отвалообразователя и допустимой скорости отвалообразователя при перемещении отвальной консоли
позволяет высокопроизводительному и дорогостоящему оборудованию роторного комплекса работать непре.рывно, т.е. производить процесс .отвалообразования и в момент перемещения отвалообразователя ,что повышает производительность комппекса.
По основному авт. св. № 977622 известно устройство .для автоматизированного контроля загруженности металлоконструкций оборудования роторных комплексов, например отвалообразователей, содержащее измеритель интенсивности потока в начальиой зоне конвейера роторного экскаватора, блоки контроля скорости движения лент конвейеров, блок упрежденного вычисления текущего значения загруженности отвальной кон3
соли по всей длине, выполненной в виде модели потока с узлом преобразования, блок аварийной сигнализации, блок упрежденного вычисления текущего значения загруженности межшарнирной секции фермы отвальной консоли отвалообразователя-, блок упрежденного вычисления текущего значения опрокидывающего момента отвальной консоли отвалообразователя, блоки установки допустимых пороговых значений контролируемых параметров в соответствии с фактическим текущим состоянием оборудования ,. блоки адаптивного порогового контроля, блок логического выбора параметра силового режима и индикаторы сравнения текущих значений интегральных параметров с текущими значениями порогов контроля; причем выходы блоков упрежденного вычисления текущих значений загруженности отвальной консоли по всей длине, загруженности межшарнирной секции и опрокидывающего момента отвальной консоли отвалообразователя через блоки адаптивного порогового контроля подключены к .входам блока логического выбора параметров силового режима, выход этого блока соединен с блоком аварийной сигнализации, блоки установки допустимых пороговых значений контролируемых параметров подключены к входам задания блоков адаптивного порогового контроля, входы адаптации каждого из которых соединены с основными входами остальных блоков адаптивного порогового контроля, а выходы текущих значений порогов этих блоков подключены к индикаторам сравнения, соединенным соответственно с выходами блоков упрежденного вычисления текущих значений загруженности отвальной консоли по всей длине, загруженности межшарнирной секции и опрокидывающего момента отвальной консоли отвалообразователя J блок упрежденного вычисления текущего значения опрокидывающего момента отвальной консоли отвалообразователя выполнен в виде модели потока материала и сумматора состояния ячеек модели потока, причем количество каналов сумматора равно количеству ячеек модели потока , электрически управляемьй потенциометр с двумя входами управления вьтолнен в виде последовательна
50984
включенных резистора и цепи соединенньк параллельно резисторных оптронов, управляющие элементы которых являются входами управления 5 электрически управляемого потенциометра, а индикатор сравнения текущих значений интегральных параметров с текущими значениями порогов контроля силового режима выполJO нен в виде преобразователя электрического сигнала, вдоль шкалы которого размещены источники света,. соединенные с входом текущего nojpoга контроля через преобразователь f5 аналоговой величины в унитарный позиционный код fij .
Недостатком указанного устройства является невозможность производить непрерывный многопараметри20 ческий контроль силового режима работы металлоконструкций оборудования роторного комплекса и при перемещении отвалообразователя.
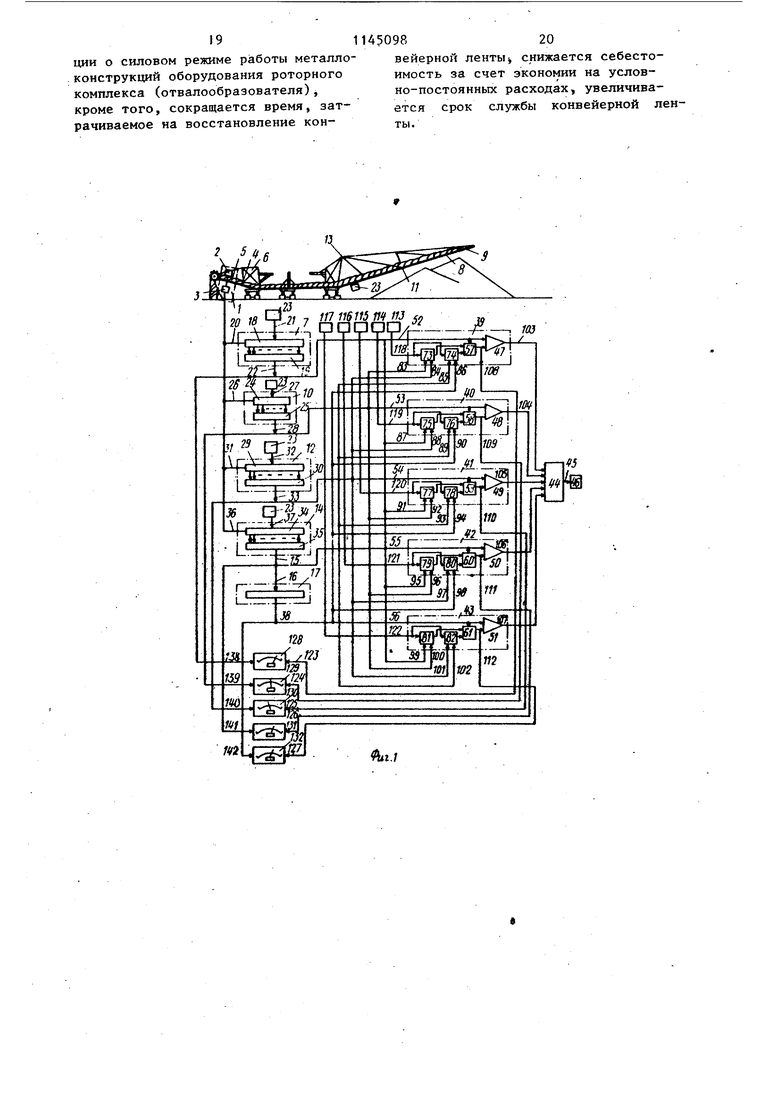
Цель изобретения - повьш1ение производительности роторного комплекса путем обеспечения работы его во время перемещения отвалообразователя и расширение функциональных возможностей устройства. Q Поставленная цель достигается тем, что устройство для автоматизированного контроля загруженности металлоконструкций оборудования роторных комплексов, содержащее измеритель интенсивности потока материала в начальной зоне конвейера роторного экскаватора, блоки контроля скорости движения- лент конвейеров , блок упрежденного вычисления Р текущего значения загруженности отвальной консоли по всей длине, выполненный в виде модели потока и узла преобразования, блок аварийной сигнализации, блок упрежденного 5 вычисления текущего значения загруженности секции фермы отвальной консоли отвалообразователя, блок упрежденного вычисления текущего значения опрокидывающего момента Q отвальной консоли отвалообразователя , блоки установки допустимых пороговых значений контролируемых параметров в соответствии с фактическим текущим состоянием оборудоJ вания, блоки адаптивного порогового контроля, блок логического выбора параметров силового режима и индикаторы сравнения текущих значений интегральных параметров с текущими значениями порогов контроля причем выходы блоков упрежденного вьгчисления текущего значения загруженности отвальной консоли по всей длине, загруженности межшарнирной секции и опрокидывающего момента отвальной консоли отвалообразователя через блоки адаптивного порогового контроля подключены к входам блока логического выбо ра параметров силового режима, выход этого блока соединен с блоком аварийной сигнализации-, блоки установки допустимых пороговых значений контролируемых параметров подключены к входам задания блоков адаптивного порогового контроля, входы адаптации каждого из которых соединены с основными входами остальных блоков адаптивного порогового контроля,, а входы текущих значений этих блоков подключены к индикаторам сравнения, соединенным соответственно с выходами блоков упрежденного вычисления текущего значения загруженности отвальной консоли по всей длине, загруженнос межшарнирной секции и опрокидывающего момента отвальной консоли отвалообразователя у дополнительно снабжено блоком упрежденного вычис ления текущего значения момента ин ции потока грунта на конвейере отвaJJьнoй консоли отвалообразоВателя блоком упре кденного вычисления тек щего значения допустимой скорости перемещения отвальной консоли отвалообразователя, двумя блоками ад тивного порогового контроля, двумя индикаторами сравнения текущих зна чений интегральных параметров с те кущинч значениями порогов контроля и двумя блоками установки допустимых пороговых значений контролируе мых параметров, первьй и второй вх ды блока упрежденного вычисления т кущего значения момента инерции потока грунта, на конвейере отвальной консоли отвалообразователя под ключены соответственно к вькодам измерителя интенсивности потока в начальной зоне конвейера роторно го экскаватора и блока контроля движения ленты конвейера, выход бло-55 ка упрежденного вычисления текущего значения момента инерция потока грунта на конвейере отвальной консоли отвалообразователя подключен к первому входу одного дополнительного индикатора сравнения текущих значений интегральных параметров с текущими значениями порогов контроля, к первому основному входу первого дополнительного блока адаптивного порогового контроля и к первым дополнительным входам адаптации остальных блоков адаптивного порогового контроля, а также через блок упрежденного вычисления текущего значения допустимой скорости перемещения отвальной консоли отвалообразователя - к первому входу другого дополнительного индикатора сравнения текущих значений интегральных параметров с текущими значениями порогов контроляг, к первому основному входу второго дополнительного блока адаптивного порогового контроля и к вторым дополнительным входам адаптации остальных блоков адаптивного порогового контроля, выходы дополнительных блоков установки допустимых поро- . говых значений контролируемых параметров подключены к вторым основным входам дополнительных блоков адаптивного порогового контроля, первые выходы которых подключены к дополнительным входам блока логического выбора параметров силового режима, вторые выходы дополнительных блоков адаптивного порогового контроля подключены к вторым входам дополнительных индикаторов сравнения текущих значений интегральных параметров с текущими значениями порогов контроля. БЛОК адаптивного порогового контроля зыполнен в виде операционного усилителя и трех электрически управляемых потенциометров, имеющих по два входа управления, первый вход операционного усилителя соединен с входом первого электрически управляемого потенциометра и является первым основным входом блока адаптивного порогового контроля., входы второго и третьего электрически управляемых потенциометров соединены между собой и являются вторым основным входом блока адаптивного порогового контроля, выходы второго и третьего электрически управляемых потенциометров подключены к входам управления первого электрически управляемого потенциометра а входы управления второго и третьего электрически управляемых потенциометров являются, соответственно основными и дополнительными входами адаптации блока- адаптивного порогового контроля, выход оп рационного усилителя является первым, а выход первого электрически управляемого потенциометра, соединенный с вторым входом операционно го, усилителя, - вторым выходом блока адаптивного порогового контроля. Блок упрежденного вычисления те кущего значения допустимой скорости перемещения отвальной консоли отвалообразователя выполнен в виде набора пороговых: элементов. На фиг. 1 изображена схема устройства; на фиг. 2 - схема электрически управляемого потенциометра на фиг. 3 - схема индикатора сравнения текущих значений интегральны параметров с текущими значениями порогов контроля. Устройство включает, измеритель 1 интенсивности потока, который состоит из датчика 2 погонной нагрузки и преобразователя 3, установ ленных в начальной зоне конвейера 4, роторной стрелы 5, роторного экскаватора 6. К выходу измерителя 1 интенсивности потока непосредственно подключены блок 7 упрезвденного вычисления текущего значения загруженности конвейера 8 отвальной консоли 9 по всей длине, блок 10 упрежденного вычисления текущего значения загруженности межшарни ной секции 11 отвальной консоли 9, блок 12 упрежденного вычисления те кущего значения опрокидывающего момента отвальной консоли 9 отвало :образавателя 13, блок 14 упрежденного вычисления текущего значения момента инерции потока грунта на конвейере 8 отвальной консоли 9 от валообразователя 13. К выходу 15 блока 14 подключены через вход 16 блок 17 упрежденного вычисления текущего значения допустимой скорости при перемещении отвальной консоли 9 отвалообразователя 13. Блок 7 упрежденного вычисления текущего значения загруженности отвальной консоли по всей длине состо ит из модели 18 потока и узла 19 988 преобразования в аналоговый сигнал. Блок 7 имеет основной вход 20, сдвиговьм вход 21 и выход 22. К сдвиговому входу 21 непосредственно подключен блок 23 контроля скорости движения ленты конвейера 8 отвалообразователя 13. Блок 10 упрежденного вычисления текущего значения загруженности межшарнирной секции 11 отвальной консоли 9 отвалообразователя 13 состоит из модели 24 потока и узла 25 преобразования в аналоговый сигнал и имеет оЬновной вход 26; сдвиговый вход 27 и выход 28. К сдвиговому входу 27 непосредственно подключен блок 23 контроля скорости движения ленты конвейера 8 отвалообразователя 13. Блок 12 упрежденного вычисления текущего значения опрокидывающего момента отвальной,консоли 9 отвалообразователя 13 состоит из модели 29 потока и сз мматора 30 состояния ячеек модели. Количество каналов сумматора 30 выбрано равным количеству ячеек модели 29-, а масщтабы преобразования отдельных каналов сумматора 30 возрастающими в зависимости от номера канала. Блок 12 имеет основной вход 31, сдвиговый вход 32 и выход 33. К сдвиговому входу 32 непосредственно подключен блок 23 контроля скорости движения ленты конвейера 8 отвалообразователя 13. Блок 14 упрежденного вычисления текущего значения момента инерции потока грунта на конвейере 8 отвальной консоли 9 отвалообразователя 13 состоит из модели 34 потока и с5Т4матора 35 состояния ячеек модели. Количество каналов сумматора 35 выбрано равным количеству ячеек модели 34, а масштабы преобразования отдельных каналов сумматора озрастающими в зависимости от омера канала. Блок 14 имеет основой вход 36, сдвиговый вход 37 и ыход 15, К сдвиговому входу 37 епосредственно подключен блок 23 онтроля скорости движения ленты онвейера 8 отвалообразователя 13. Блок 17 упреяоденного вычисления екущего значения допустимой скороси перемещения отвальной консоли состоит из набора пороговых элеентов, которыми могут служить.
9
например, калиброванные сопротивления и электронные ключи. Блок 17 имеет вход 16 и выход 38.
Блоки 7, 10, 12, 14 и 17 упрежденного вычисления текущего значения загруженности отвальной консоли 9 по всей длине, загруженности межшарнирной секции 11, опрокидывакйцего момента отвальной консоли 9, момента инерции потока вскрышног грунта на конвейере 8 отвальной консоли 9 и допустимой скорости отвалообразователя 13 при перемещении . отвальной консоли 9 через блоки . 39-43 адаптивного порогового контроля связаны с блоком 44 выбора параметров силового режима, выход 45 которого связан с блоком 46 аварийной сигнализации.
Блок 44 реализует логическую функцию ИЛИ, т.е. при появлении сигнала на выходе хотя бы одного из блоков 39-43 адаптивного порогового контроля, на выходе блока 44 появляется единичный сигнал, вызывающий срабатывание блока 46 аварийной сигнализации Блок 44 выбора параметров силового режима работы оборудования может быть выполнен в виде контактов реле (в случае установки их в блоках 39-43 адаптивного порогового контроля) или в виде ключей коммутации, которыми могут служить транзисторы.
Каждый из блоков 39-43 адаптивного кодового контроля с четырьмя входами адаптации выполнен идентично в виде операционного усилителя 47 (48, 49, 50, 51), соединенного с основным входом 52 (53, 54, 55, 56) блока 39 (40, 41, 42, 43) непосредственно и через электрически управляемый потенциометр 57 (58,
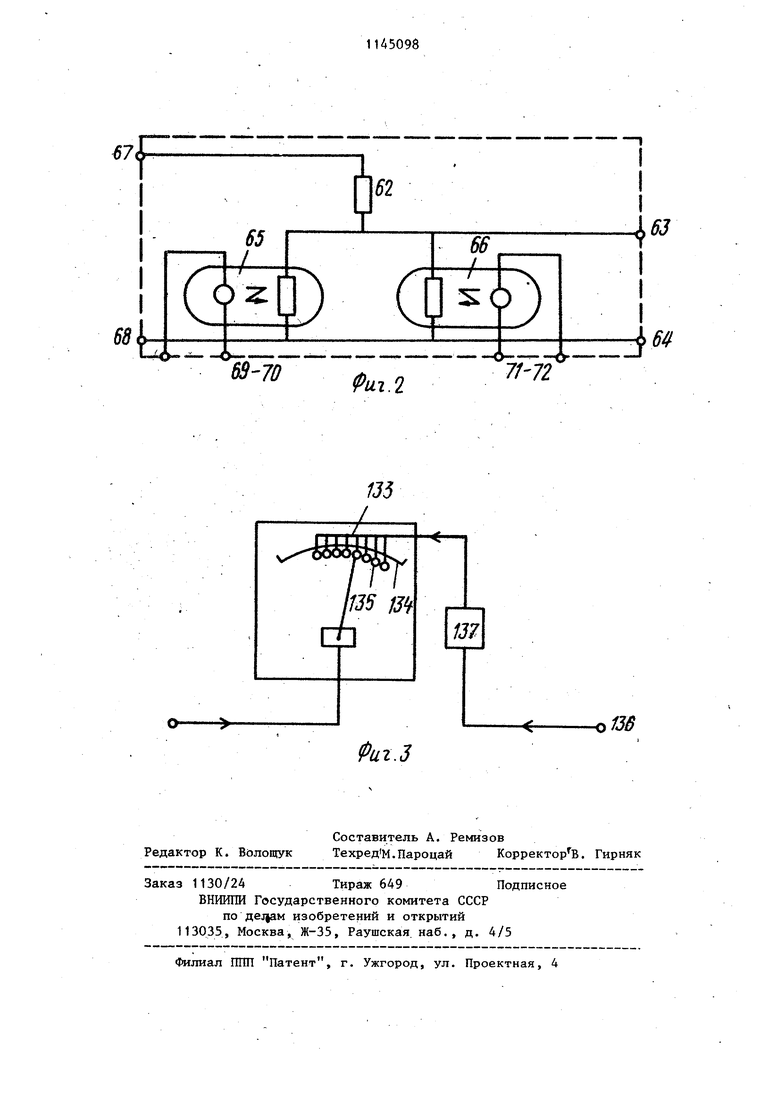
59,60, 61) (фиг. 2), которые выполнены идентично в виде последовательно включенных резистора 62 и цеписоединенных параллельно выходов
63 и 64 резисторных оптронов 65 и 66, управляющие элементы которых подключены через 1входы 69-70 и 71-72 управления электрически управляемого потенциометра, входы 67-68 которого являются основными. Управляющие входы электрически управляемого потенциометра 57 (58, 59
60,61) подключены к выходу двух других электрически управляемых потенциометров 73 и 74 (75 и 76,
4509810
77 и 78, 79 и 80, 81 и 82) входы управления которых непосредственно :оединены с входами адаптации 83-84 и 85-86 (87-88 и 89-90, 91-92 и 5 93-94, 95-96 и 97-98, 99-100 и
101-102), выход 103 (104, 105, 106, 107) операционного усилителя 47 (48, 49, 50, 51) является первым выходом, а выход 108 (109, 110, 111, 112)
10 вторым выходом блоков 39 (40, 41, 42, 43), а оснбвные входы электрически управляемых потенциометров 73 и 74 (75 и 76, 77 и 78, 79 и 80, 81 и 82) соединены с входом 118
15 (И9, 120, 121, 122) задания порога.
Электрически управляемые потенциометры 73 и 74 (75 и 76, 77 и 78, 79 и 80, 81 и 82) выполняют функцию делителя напряжения соответствующего установленной в блоке 113 (114, 115, 116,117) величине допустимого порогового значения соответствующего параметра силового режима оборудования , причём благодаря выполнению управляемых сопротивлений указанного делителя в виде резисторных оптронов 65 и 66 и описанному вьше выполнению электрически управляемого
0 потенциометра поступаю ций с выхода блока 113 сигнал допустимого порога автоматически изменяется (корректируется в сторону уменьшения) в зависимости от текущих значений
35 четырех других обобщенных показателей силового режима - двух для электрически управляемого потенциометра 73 и двух для электрически управляемого потенциометра 74. Скорректированные сигналы допустимого порога поступают с выходов электрически управляемых потенциометров 73 и 74 на входы управления конечного электрически управляемого по4S тенциометра 57, на основной вход которого подается сигнал с основного входа 52 и автоматически меняется (корректируется в сторону уменьшения) в зависимости от текущего значения сигнала, поступающего через основной вход блока 39 адаптивного порогового контроля. Сигнал допустимого порога с выхода электрически управляемого потенциометра 57 поступает на один из входов операционного усилителя, на второй вход которого поступает сигнал с выхода блока 7 (или соот 1
ветственно 10, 12, 14, 17). В таком включении операционный усилитель выполняет функциюэлемента сравне-г ния (компаратора), т.е. в зависимости от знака рассогласования текущих значений напряжений на входах операционного усилителя практически скачкообразно (при обычных используемых значениях коэффициента усиления ускпителя) изменяется выходной сигнал операционного усилителя .
S
Таким образом, блок 39 (40, 41, 42, 43) адаптивного порогового контроля в предложенном исполнении обеспечивает (в каждом канале) пороговый контроль соответствующего параметра силового режима оборудования при автоматическом изменении текущего значения допустимого (заданного) порога контроля в зависимости от текущих значений обобщенных показателей силового режима, вычисляемых в четырех других каналах контроля.
Каждый из блоков 39-43адаптивного порогового контроля подключен непосредственно через входы t18122 к соответствукщим блокам 113117 установки допустимых пороговых значений контролируемых параметров в соответствии с фактическим текупщм состоянием оборудования. Через первые основные входы 52-56 и через входы адаптации 83-84 и 85-86, 87-88, и 89-90, 91-92 и 93-94, 9596 и 97-99, 99-100 и 101-102 соответствующие блоки 39-43 соединены с соответствующими выходами блоков 7, 10, 12,14 и 17 упрежденного вычисления текзтцего значения загруженности отвальной консоли по всей длине, загруженности межшарнирной секции, опрокидывающего момента, момента инерции потока грунта на конвейере отвальной консоли и допустимой скорости перемещения отвальной консоли отвалообразователя, а через выходы 108-112 с соответствующими входами 123-127 индикаторов 128-132 сравнения текущих значений интегральных параметров с текущими значениями порогов контроля..
Индикаторы 128 (129, 130, 131, 132) сравнения текущих значений интегральных параметров с текущими значениями порогов контроля выпрл45098 . 12
нены в виде преобразователя электрического сигнала, например, стрелочного вольтметра 133, вдоль шкалы 134 которого (фиг. 3) дополнительно размещены источники света 135, например, электрические лампы или светодиоды, соединенные с вхо, дом 136 через преобразователь 137 аналоговой,величины в унитарный
10 код. Каждый из индикаторов. 128-132 сравнения текущих значений интегральных параметров, с текущими значениями порогов контроля через основной вход 138-142 соединен с выf5 ходами 22, 28, 33, 15.. 38 соответствующих блоков упрежденного вычисления текущего значения загруженности отвальной консоли по всей длине, загруженности межшарнирной секции,
20 опрокидывающего момента, момента инерции потока вскрьппного грунта на конвейере отвальной консоли и допустимой скорости отвалообразователя при перемещении отвальной
25 консоли.
Вход 123 (124, 125, 126, 127) индикатора 128 (129, 130, 131, 132) соединен через преобразователь 137 (фиг. 3) аналоговой величины
в унитарный код с выходом 108 (109, 110, 111, 112) текущего значения порога контроля, соответствующего блока 39 (40, 41, 42, 43) адаптивного порогового контроля. Сигнал,
5 поступающий от блока 7 (10. 12, 14. 17) через выход 22 (28, 33, 15, 38) на основной вход 138 (139, 140, 141, 142) индикатора 128 (129, 130, 131, 132) сравнения текущих значе0 НИИ интегральных параметров с текущими значениями порогов контроля и соответствующий упрежденному вычислению текущего значения загруженности отвальной консоли по всей
5 длине, загруженности межшарнирной секции, опрокидьшающего момента, момента инерции потока грунта на конвейере отвальной консоли и допустимой скорости перемещения отвальной консоли, индицируется
стрелкой соответствующего индикатора, а сигнал, поступающий от блока 39 (40, 41, 42, 43) адапуивного .порогового контроля через выход 108
5 (109, 110, 111, 112) текущего значения порога, попадает на вход, 123 (124, 125, 126, 127) индикатора 128 (129, 130, 131, 132) срав13
нения текущих значений интегральны параметров с текущими значениями прогов контроля через преобразователь аналоговой величины в унитарный код/ индицируется на электрических лампочках или светодиодах, расположенных вдоль шкалы индикатора.
Устройство работает следующим образом.
При работе роторного экскаватора 6 с измерителя 1 интенсивности потока, сигнал (вых одное напряжение датчика 2, благодаря действию частотного преобразователя 3 представлено в частотно-импульсной форме , соответствующей текущему значению производительности комплекса) поступает на основные входы блоков 7, 10, 12, 14 упрежденного вычисления текущего значенияГ загруженности отвалообразователя на всей длине отвальной консоли, загруженности межшарнирной: секции, опрокидывающего момента и момента инерции потока грунта на конвейере отвальной консоли отвалообразователя.
Сигнал,поступающий в модель 18 блока 7 упрежденного вычисления текущего значения загруженности отвальной консоли 9 по всей длине, каждый импульс последовательности импульсов, частота которых отражает текущую производительность, записывается в первой ячейке модели 18 и переносится в последующие ячейки модели со скоростью, пропорциональной частоте продвигающихся импульсов, поступающих от блока 23 контроля скорости движения ленты конвейера 8. Таким образом, скорость продвижения импульсов в модели 18 пропорциональна скорости, с которой будет перемещаться отрезок потока вскрышного грунта, когда он достигнет конвейера отвальной консоли отвалообразователя. Число импульсов , находящихся в данный момен в ячейках модели 18, соответствует весовому количеству вскрышного грунта, которое будет загружать металлоконструкция консоли 9 отвалообрАзователя 13 после достижения контролируемого участка стрелы 9 указанным отрезком потока вскрышного грунта, перемещаемого конвейерами комплекса. Число импульсов, находящихся в данный
45098 , ,4
момент в модели 18, с помощью узла преобразования 19 преобразуется в аналоговый сигнал, поступающий на основной вход 138 индикатора 128 5 сравнения текущих значений интегральных параметров с текущими значениями порогов контроля, на основной вход 52 блока 39 адаптивного порогового контроля и на входы 87,
0 91, 95 и 99 адаптации соответствующих блоков 40-43 адаптивного порогового контроля.
Поступая в модель 24 блока 10 упрежденного вычисления текущего
5 значения загруженности межшарнирной секции 11 фермы отвальной консоли 9 отвалообразователя 13, сигнал, каждый импульс последовательности импульсов, частота которых
0 отражает текущую производительность, записывается в первой ячейке модели 24 со скоростью, пропорциональной частоте продвигающихся импульсов, поступающих от блока 23 контроля скорости движения ленты конвейера 8. Таким образом, скорость продвижения импульсов в модели 24 пропорциональна скорости, с которой будет перемещаться отрезок потока грунта, когда он достигнет межшарнирной секции It конвейера отвалообразователя, а число импульсов , находящихся в данный момент в ячейках модели 24j соответствует
весовому количеству вскрышного грунта, которое будет загружать межшарнирную секцию 11 формы отвальной консоли отвалообразователя 13 после достижения контролируемого
участка консоли указанным отрезком потока вскрышного грунта, переме-/ щаемого конвейерами комплекса. Число импульсов, находящихся в данный момент в модели 24, с помощью узла
25 преобразуется в аналоговый сигнал, поступающий на основной вход 139 индикатора 129-сравнения текущих значений интегральных параметров с текущими значениями порогов
контроля, на основной вход 53 блока 40 адаптивного порогового контроля и на входы 83i 92, 96, 100 адаптации соответствукицих блоков 39-41 адаптивного порогового контроля.
Поступая в модель 29 блока ,12 упрежденного вычисления текущего значения опрокидывающего момента
15
отвальной консоли отвалообразователя 13, сигнал, каждый импульс последовательности импульсов записывается в первой ячейке модели и переносится в последующие ячейки ,модели со скоростью, пропорциональной частоте-продвигающихся импульсо поступаюпщх от блока 23 контроля скорости движения ленты конвейера 8. Таким образом, скорость продвижения импульсов в модели потока пропорциональна скорости, с которой буд4т перемещаться отрезок потока-вскрышного грунта, когда он достигнет конвейера 8 отвальной консоли 9, а число импульсов, находящихся в данный момент в ячейках модели потока, соответствует весовому количеству вскрышного грута , которое будет загружать конвейер отвальной консоли на всей длине. Каждый из импульсов, находящихся в этот момент в модели 29 потока, с помощью узла 30 преобразования (сумматора) формируется в масштабах преобразования отдельных каналов сумматора 30, линейно возрастающих в зависимости от номера канала, в аналоговую форму. Сигнал в аналоговой форме поступает на выход 33, оттуда на основной вход 140 индикатора 130 сравнения текущих значений интегральных параметров с текущими значениями порогов контроля, на основной вход 54 блока 41 адаптивного порогового контроля, на входы 84, 88, 97 и 10 адаптации соответствующих блоков 39-43 адаптивного порогового контроля.
Поступая в модель 34 блока 14 упрежденного вычисления момента инерции потока вскрышного грунта на ленте конвейера отвальной консоли отвалообразователя 13, сигнал, каждый импульс последовательности импульсов, записывается в первой ячейке модели 34 и переносится в последую&(ие ячейки модели со ско .ростью пропорциональной частоте продвигакш(ихся импульсов, поступшощих от блока 23 контроля скорости движения ленты конвейера 8. Такш4 образом, скорость продвижения импульсов модели 34 пропорциональна скорости, с которой будет перемещаться отрезок потока вскрьшного грунта когда он достигнет конвейе4509816
ра 8 отвальной консоли 9, а число импульсов, находящихся в данный мо мент в ячейках модели 34 потока, соответствует весовому количеству
J вскрьшного грунта, которое будет загружать конвейер отвальной консоли на всей длине. Каждый из импульсов, находящихся в этот момент в модели 34 потока, с помощью узла 35 преобразования (сумматора) формируется в масштабах преобразования отдельных каналов сумматора 35, возрастающих в зависимости от номера канала, в аналоговую форму.
15 Сигнал в аналоговой форме поступает на выход 15, откуда на основной вход 16 блока упрежденного вычисления текущего значения допустимой скорости отвалообразователя при перемещении отвальной консоли, на основной вход 141 индикатора 131 сравнения текущих значений интегральных параметров с текущими значениями порогов контроля, на основ25 и°й вход 55 блока 42 адаптивного порогового контроля, на входы 85, 83, 93 и 102 адаптации соответствующих блоков 39-43 адаптивного порогового контроля.
JQ Поступая с выхода 15 блока 14 упрежденного вычисления текущего значения момента инерции потока вскрышного грунта на ленте конвейера отвальяой консоли на вход 16 блока 17 упрежденного вычисления
35 текущего значения допустимой скорости отвалообразователя при пере. мещении отвальной консоли, сигнал в аналоговой форме формируется в блоке 17, выполненном в виде набора пороговых элементов и индицируется на индикаторе 132 в значениях допустимой скорости, С выхода 38 сигнал в аналоговой форме поступает на основной вход 142 индикатора 132 сравнения текущих значений интегральных параметров с текущими значениями порогов контроля на основной вход 56 блока 43 адаптивного порогового контроля, на входа 86, 90, 94 и 98 адаптации соответствующих блоков 39-42 адаптивного порогового контроля.
Блоки 39-43 адаптивного порогового контроля работают идентично и предназначены для учета взаимодействия сигналов, поступающих на входы 52-56 основные, на входы 83
17
и 84, 85 и 8б, 87 и 88,-89 и 90, 91 и 92, 93 и 94, 95 и 96, 97 и 98 99 и 100, 101 и 102 адаптации и на входы 118-122 задания текущего значения порога контроля.
В связи с тем, что блоки 39-43 работают идентично, рассмотрим работу одного из блоков, например, 39. В блоке 39 адаптивного порогового контроля сигнал , поступающий с блока 7 упрежденного вычисления текущего значения загруженности отвальной консоли по всей длине-, формируется в операционном усилителе 47 с учетом взаимодействия сигналбв , поступающих на вход 118 задания текущего значения порога контроля с блока 113 установки допутимых пороговых значений контролируемых параметров, в зависимости от состояния оборудования и сигналов, поступающих на входы 83.и 84, 85 и 86 адаптации с соответствующих выходов 28, 33, 15i 38 блоков 10, 12, 14, 17 упрежденного вычисления текущего значения загруженности межшарнирной секции, опрокидьгоающего момента, момента инерции и допустимой скорости перемещения отвальной консоли. Сигналы с блока 117 установки допустимых пороговых значений контролируемых параметров в зависимости от состояния оборудования и сигналы адаптации через входы 83 и 84, 85 и 86 попадают на соответствующие электрически управляемые потенциометры 73 и 74 (фиг. 2), текущее значение коэффициентов передачи которых определяется соотношением текущих значений сигналов, поступающих на входы управления 69 и 70, 71 и 72 вследствие изменения сопротивления резисторов резисторных оптронов 65 и 66 под действием светового потока управляющих элементов.
С выходов электрически управляемых потенциометров 73 и 74 скорректированные сигналы поступают на входы управления конечного злектрически управляемого потенциометра 57, который работает аналогично с вышеописанными 73 и 74. Таким образом, сигналы, поступающие с выхода конечного электрически управляемого потенциометра 57 и с выхода 22 блока 7 через вход 52 блока 39 адаптивного порогового контроля, поступают
4509818
на входы операционного усилителя 47. Операционный усилитель 46 в таком включении выполняет функцию элемента сравнения (компаратора), 5 т.е. в зависимости от знака рассогласования текущих значений напряжения на входах операционного усилителя практически скачкообразно (при обычно используемых значениях
0 коэффициента усиления усилителя)
изменяется выходной сигнал операционного усилителя, который поступает на выход 103 блока 39 адаптивного порогового контроля.
5 Таким образом, текущее значение порога контроля, каждого из каналов измерения и контроля, автоматически измеряется в зависимости от текущих значений обобщенных показателей четьфех других каналов и значения сигналов, поступающих с блока установки допустимых пороговых значений контролируемых пара- метров в зависимости от состояния
5 оборудования.
С аналоговых выходов 103-107 соответствующих блоков 39-43 адаптивного порогового контроля сигналы поступают на соответствующие
Q входы блока 44 логического выбора параметров силового режима и в слу- чае превьш1ения любым обобщенным показателем заданного значения поступают в блок аварийной сигнализации, который связан с системой аварийной остановки роторного комплекса.
Использование предлагаемого устройства позволяет повысить эксплуатационную надежность, увеличить межремонтные периоды работы роторного комплекса за счет упрежденного вычисления текущего значения загруженности отвальной консоли по
всей длине, загруженности межшарнирной секции, опрокидывающего момента, момента инерции потока вскрышного грунта и допустимой скорости отвалообразователя при перемещении отвальной консоли отвалообразователя ,, установки допустимых пороговых значений контролируемых параметров в соответствии с фактическим текущим состоянием оборудования, адаптивного порогового
контроля, логического выбора параметров силового режима работы оборудования и индицирования информации о силовом режиме работы металлоконструкций оборудования роторного комплекса (отвалообразователя), кроме того, сокращается время, затрачиваемое на восстановление кон5 it
т
вейерной ленты снижается себестоимость за счет экономии на условно-постоянных расходах, увеличивается срок службы конвейерной ленты.
ФигЛ
т
Фиг.З
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для автоматизированного контроля загруженности металлоконструкций оборудования роторных комплексов | 1981 |
|
SU977622A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
